小儿麻痹后遗症患者机器人辅助肾肿瘤根治术的体位探讨
2023-06-20 05:42廖淑芬潘鹏飞陈旭龚凤球曾淑燕王萍
机器人外科学 2023年1期
关键词:肾癌
廖淑芬 潘鹏飞 陈旭 龚凤球 曾淑燕 王萍

摘 要 目的:探讨小儿麻痹后遗症患者机器人辅助下肾肿瘤根治术的安全体位。方法:回顾性分析2021年4月—2022年6月中山大学附属第一医院泌尿外科收治的3例接受机器人肾恶性肿瘤根治术的小儿麻痹后遗症患者临床资料、术中体位情况和临床资料。结果:3例患者均成功实施机器人辅助下肾盂癌或肾癌根治手术,无中转开腹。术中采用了截石位、改良截石位和左侧斜仰60°体位,患者术中体位转换顺利进行,未出现机器人操作钳相互碰撞和挤压等情况,未出现需要临时改变机器人Trocar位置或增加Trocar的情况。手术顺利完成,术后无压疮,肢体神经功能完好,无肢体感觉异常或运动功能异常。结论:采用改良的体位进行小儿麻痹后遗症患者机器人辅助下肾恶性肿瘤根治术是安全可行的。
关键词 小儿麻痹后遗症;机器人辅助手术;肾盂癌;肾癌;体位管理
中图分类号 R737.11 文献标识码 A 文章编号 2096-7721(2023)01-0063-06
Abstract Objective: To explore the safe surgical position of robot-assisted radical resection of renal malignancy for patients with sequelae of poliomyelitis. Methods: The clinical data of 3 patients with sequelae of poliomyelitis who underwent robot-assisted renal malignancy resection at Department of Urology, the First Affiliated Hospital of Sun Yat-sen University from April 2021 to June 2022 were retrospectively analyzed. Results: All the 3 cases of robot-assisted radical resection of renal malignancy were successfully completed without conversion to laparotomy. Lithotomy position, modified lithotomy position and left lateral 60° recumbent position were used and the postion changes successfully performed during surgery. No collisions or compressions of robotic arms was observed, and there was no need for changing the positions of robotic Trocars or adding new Trocars during operation. All surgeries were successfully completed without pressure ulcers, limb paresthesia or motor function abnormalities after operation. Conclusion: Using appropriate and modified surgical position is safe and feasible to perform robot-assisted radical resection of renal malignancy for patients with sequelae of poliomyelitis.
Key words Sequelae of poliomyelitis; Robotic surgery; Renal pelvis cancer; Renal carcinoma; Position management
随着机器人技术在外科手术中的发展,其在泌尿外科手术中的优势愈发突出。但对于一些合并特殊疾病的患者,尤其是针对肢体功能障碍的患者在行机器人辅助泌尿外科手术时,由于体位限制,机器人辅助手术体位的安置给手术护理带来了诸多困难。肾盂癌指发生在肾盂或肾盏上皮组织的尿路上皮恶性肿瘤,根治性手术适用于无远处转移患者,切除范围包括肾脏、肾脂肪囊、输尿管全段及膀胱袖套状[1]。由于泌尿系统在解剖上的特殊性,尤其是下尿路手术空间狭小,增加了腹腔镜手术的难度[2]。达芬奇机器人手术系统的诞生使上述难题迎刃而解,为配合机器人辅助手术,术中需患者多种体位转换,而小儿麻痹后遗症患者由于肢体活动障碍及脊柱侧弯[3],机器人辅助手术的体位摆放比腔镜手术要求更高、更专业。同时,由于下肢畸形的小儿麻痹后遗症患者无法摆放常规体位,为保证手术顺利进行,中山大学附属第一医院手术室护理团队进行了体位创新。目前,关于小儿麻痹后遗症患者行机器人肾恶性肿瘤切除术体位安全管理的报道较少,现将本研究总结并报道如下。
1 资料与方法
1.1 一般资料
回顾性分析2021年4月——2022年6月中山大学附属第一医院泌尿外科收治的3例接受机器人肾恶性肿瘤根治术的小儿麻痹症后遗症患者临床资料。本研究共纳入3例患者,其中男性2例,年龄分别为48岁和66岁,均为右肾盂癌;女性1例,年龄28岁,诊断为右肾癌。患者术前均行肾脏超声、腹部增强CT等检查进行手术评估。术前患者及家属均知情并签署同意书。
1.2 手术体位安全管理
1.2.1 多学科集中式术前访视
对于有小儿麻痹后遗症的肾癌或肾盂癌等复杂疾病,医生和護士应参与术前术科多学科讨论,共同为患者制定适宜的手术治疗方案和手术护理方案,提前做好人、机、物、环等安全准备。术前护理人员应做好病房访视,了解患者的基本病情和手术方式。同时,向患者及家属介绍手术室环境、麻醉方式,并进行体位预摆置,充分了解患者对手术体位的耐受程度并及时调整。此外,护理人员术前应向患者及家属宣教达芬奇机器人手术的优势和安全性,缓解其紧张和不安情绪。同时,提前告知患者及家属围手术期的注意事项,如术前禁食、禁水时间、术后体位制动时间及术后管道的种类和作用等。解答患者及家属对手术的疑问,做好患者的心理疏导,减轻患者焦虑情绪,增强患者战胜病痛的信心。
1.2.2 患者评估
重点评估患者全身形体,双下肢瘫痪、畸形情况及关节活动度(包括颈椎、腰椎),评估患者肌力、感知觉、下肢萎缩及下肢强直弯曲等情况。由于小儿麻痹后遗症患者无法正常摆放分腿仰卧位,因此,手术时应将患者双下肢固定于截石位脚架,分腿仰卧位调整为改良截石位。由于患者长期双下肢无法站立、行走,其所有行动依靠双上肢,导致上半身宽厚,下半身萎缩。因此,在摆放左侧斜仰60°卧位时,为了避免右上肢与机器人操作臂相撞,可将患者右手固定于右手托手板上,左上肢置入腋前线。健侧腿弯曲,患侧腿伸直,两腿之间垫软垫隔离。
1.2.3 人员配置
因该手术体位摆置难度较大,术中需多次变换体位,每台手术需安排3名经验丰富的骨干护士负责手术护理,主要负责术前参与患者访视,病情会诊及体位预摆置操作等。其中1名护士负责洗手配合工作,另外2名护士负责患者安全核查、术中用药、体位摆置等巡回工作。
1.2.4 体位摆放物品准备
在体位摆放时,护理人员应提前准备好截石位脚架、流体垫、各种啫喱垫、抽吸式可塑性气垫、固定带、棉纸、中单等相关物品。
1.3 术中体位摆放
1.3.1 截石位摆放风险防范要点
根据术前访视时患者的双下肢可弯曲及张开程度,预摆放截石位。摆放时注意患者脚和腿的角度防止患者关节脱位,下肢神经受损。由于手术时间较长,应在患者头下垫流体垫,保护头部,防止皮肤压力性损伤。此外,注意保护患者颈椎,不能悬空,妥善固定患者上肢及上半身。
1.3.2 改良截石位摆放风险防范要点
目前,肾盂癌手术常规采用平卧的分腿仰卧位(如图1),待手术助手打好腔镜穿刺器后,巡回护士遥控手术床,保持头低脚高的分腿仰卧位,摇床时注意患者肢体固定是否牢靠,防止身体下滑,以免影响机器臂的对接。患者臀部垫皮肤保护贴,并将双手置于身体的两侧,用布单包裹,以保护静脉输液道的通畅。本研究中患者因下肢原因无法妥善固定双下肢,故将“人”字体位改为改良截石位,解决因手术体位带来的手术操作困难。改良体位时,护士应与外科医生共同摆置体位,将患者下肢固定于托腿架上,妥善固定,调整角度,双腿分开45°,尽可能摆置为医生易操作的体位。体位摆放要点:①术中需头低脚高位,予上肩托垫马蹄啫喱垫;②中单包裹双手,避免患者皮肤触及手术床的金属面;③正确粘贴负极板,防止患者电灼伤;④妥善固定其上半身。
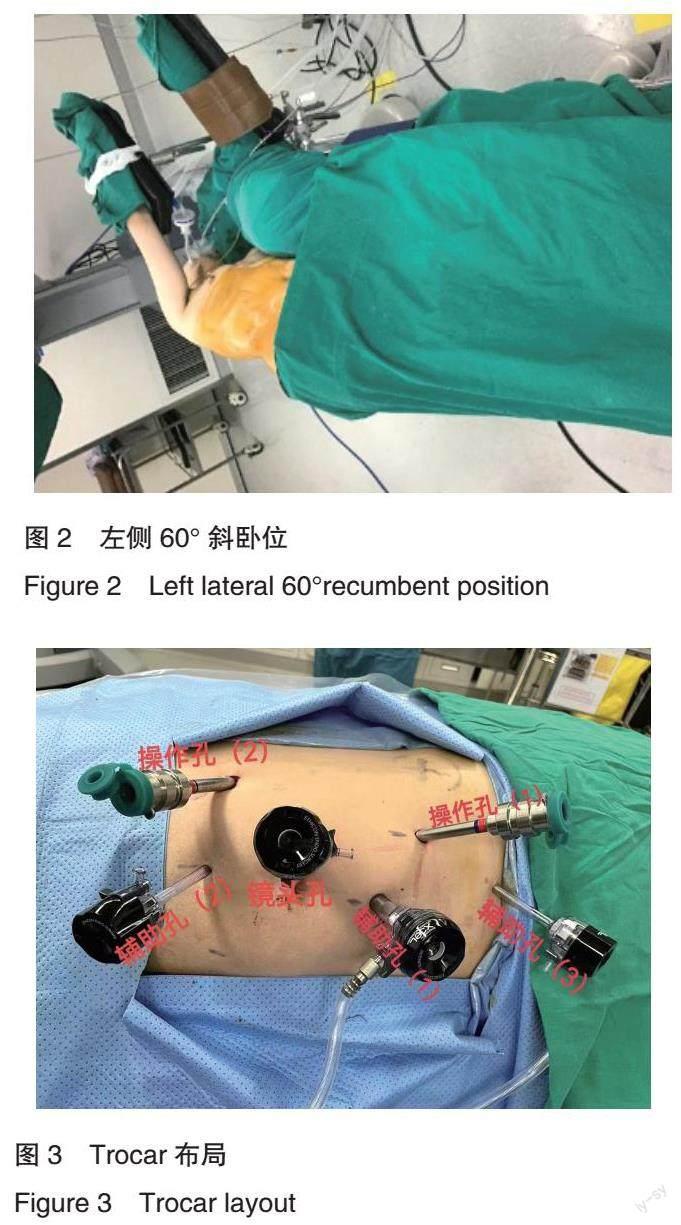
1.3.3 左斜仰60°体位风险防范
手术常规采用左斜仰60°卧位(如图2),采用“四点一线”原则,腰部垫高,健侧腿弯曲,患侧腿伸直,两腿之间垫软垫隔离,右手置于手架上固定,使得“头、肩、髋、踝”在同一水平位,固定患侧髋部和胸部,健侧髋部垫压疮贴。由于本患者腰以上部位宽厚,腰部以下萎缩,故采用左斜仰60°体位。体位摆放要点:①用眼贴保护好患者的眼睛,摆放斜仰侧卧位时,用流体垫塑形固定患者头部;②患者右上肢妥善固定在托手板上,左上肢固定于腋前线,用一软长枕啫喱垫固定左上肢,避开机器人臂操作位置;③患者后背不能与手术床完整地贴合,故还需在空隙的地方置一啫喱垫顶住后背,使后背均匀的受压;④腰下置抽吸式可塑性体位气垫,抽气后塑形,使用一次性固定带固定腰部。
1.4 手术方法
3例手术均采用第3代达芬奇机器人辅助进行。1例患者麻醉后,取截石位,行膀胱镜检查,后改平卧位,行机器人辅助右侧输尿管切除和部分膀胱切除缝合术,接着改60°左侧斜卧位行机器人辅助右肾盂癌根治术;1例患者平卧位行机器人辅助右侧输尿管切除和部分膀胱切除缝合术,接着改60°左侧斜卧位行机器人辅助右肾盂癌根治术;1例患者60°左侧斜卧位行机器人辅助右肾癌右肾部分切除术。机器人辅助手术Trocar布局如图3所示。
1.5 手术结局
观察并记录术中机器人和腹腔镜器械协调情况、增加或改变Trocar位置情况、手术时间、手术出血量、术后肠道功能恢复时间、术后住院时间、术中和术后并发症(包括皮肤压疮、新出现的肢体功能障碍和神经损伤等)以及术后恢复情况。
1.6 术后随访
采用门诊复查及电话询问等方式对患者进行术后随访。随访的内容包括:患者术后恢复状态、下床活动情况、肢体活动情况、是否有皮肤压疮、是否出现新发的肢体障碍或者异常、肿瘤复发或转移等。
2 结果
2.1 手术总体情况
3例患者均成功实施机器人辅助手术,分别完成经尿道膀胱镜检查、活检+机器人辅助右肾盂癌根治术+膀胱部分切除术、机器人辅助右肾盂癌根治术以及机器人辅助腹腔镜下肾部分切除术。3例患者手术均顺利完成,术中体位转换顺利进行,无1例中转开腹。手术中位时间190(135~505)min,出血量100(50~600)ml。
2.2 术中机器人机械臂和腹腔镜操作情况
经过术前充分的讨论,采用改良的手术体位,可避免术中出现机器人操作钳相互碰撞、挤压或打架等情况,避免出现临时改变或增加机器人Trocar位置的情况,避免临时改变或增加腔镜辅助操作孔等情况的发生。由此可见,经过医生和护士设计和改良的手术体位有利于本研究中复杂机器人辅助手术的实施。
2.3 患者术后恢复情况
术后患者无压疮,肢体神经功能完好,无新出现的肢体感觉异常或运动功能异常。所有患者术后第2 d均可下床活动,并恢复肠道功能和肛门排气,术后住院中位时间6(5~8)d,术后病理诊断为肾盂癌或肾癌。
2.4 随访情况
3位患者均获随访,术后中位随访时间2(1~15)个月,期间无患者出现新发的肢体障碍或者感觉异常等情况。
3 讨论
本文通过3例机器人辅助下肾盂癌/肾癌根治术的体位管理论证了术中特殊体位管理,尤其是肢體功能障碍患者在术中的多体位转换对保障手术顺利进行具有重要作用。目前,机器人辅助腹腔镜手术已成大型综合医院常见外科手术技术,机器人辅助手术中较为复杂的体位配合和合理的机械臂布局对术中护理安全管理提出了新要求[4-5]。为更好地配合机器人辅助手术的完成,护理组应提前准备特殊体位的设计与实施装置,采用专人或多人进行术中体位管理,保证手术顺利进行[6]。良好的特殊体位管理有利于促进机器人辅助手术在临床的广泛应用,本文涉及的特殊体位管理方法也可推广至其他肢体功能障碍患者的腹腔镜或内镜辅助手术。良好的术前访视、医护沟通才是构架特殊体位管理方法的基础[7]。
机器人辅助手术的应用不但改变了传统外科手术的方式,而且对患者的体位安全管理提出了新要求,打破了传统外科手术中的护理配合模式,给术中的相关护理人员带来了新挑战[8]。文中的3例机器人辅助手术受限于特定Trocar布局,术中体位变换困难,对护理配合人员的专业水平和技能提出了新要求[9]。本研究手术配合的难点和关键点主要体现在以下几个方面:①术中需要多次改变手术体位,以减轻因手术体位不当给患者肢体带来的局部压力[10-11]。
为了高效配合机器人辅助手术,护理人员应熟悉患者多次体位转换的操作,改良手术体位,为患者制定个性化的护理方案。在保证手术正常进行的同时,最大程度减轻对患者皮肤的损伤及神经的压迫,力求做到精细化、精准化护理[12]。②综合运用流体垫、啫喱垫、体位架以及抽吸式可塑性体位气垫,加快手术体位摆放,缩短手术时间[13]。
目前,关于小儿麻痹后遗症患者行机器人辅助手术体位管理的相关报道较少,本文对此类患者体位安全管理的经验总结也属于初探阶段。通过对小儿麻痹后遗症患者行机器人辅助肾盂癌/肾癌根治手术的护理难点分析发现,对于一些肢体功能障碍患者,护理人员应做好充分的术前访视、有效的术中体位护理,这是机器人辅助手术护理人员进行手术配合的关键,有利于手术顺利完成[14]。本研究的手术护理配合方案不仅仅局限于小儿麻痹症患者,对于术中需要变换体位的其他患者,护理人員应做到提前与主刀医生沟通,充分了解患者的手术情况,备好摆放体位所需物品、进行个性化体位摆置。这既减少了术中体位摆放的时间,又保护了患者肢体安全,在一定程度上降低了手术风险,有利于充分保障患者术中安全,加快术后恢复,实现高质量的医护配合。
参考文献
[1] 白浩.后腹腔镜配合下腹部小切口肾盂癌根治性切除术的疗效及对患者并发症率的影响分析[J].当代医学, 2020, 26(2): 167-168.
[2] Hoznek A, Hubert J, Antiphon P, et al. Robotic renal surgery[J]. Urologic Clinics, 2004, 31(4): 731-736.
[3] 张诗剑, 杨超群, 戚浩天, 等.3D打印模拟手术联合定制钢板固定治疗小儿麻痹后遗症股骨干骨折[J]. 中国组织工程研究, 2020, 24(12): 1875-1880.
[4] 高凤兰, 张晓静, 张伟. 达芬奇机器人辅助下尿路手术病人的体位安全管理[J]. 护理研究, 2018, 32(15): 2469-2470.
[5] 涂广平, 孙吉春, 聂晚频, 等. 机器人辅助与腹腔镜胰十二指肠切除术治疗胰腺癌的效果与安全性比较[J]. 中国普通外科杂志, 2020, 29(3): 268-275.
[6] 陆彤, 刘佳, 芮琳. 改良体位预防患者在达芬奇机器人手术中医疗器械相关压力性损伤的效果观察[J]. 护理学报, 2020, 27(1): 70-72.
[7] Shah S B, Hariharan U, Bhargava A K, et al. Robotic surgery and patient positioning: Ergonomics, clinical pearls and review of literature[J]. Trends in Anaesthesia and Critical Care, 2017, 5(14): 21-29.
[8] Hiess M, Seitz C. Robot-assisted renal surgery: current status and future directions[J]. Robot Surg, 2016.DOI: 10.2147/RSRR.S71328.
[9] Raheem A A, Song H J, Chang K D, et al. Robotic nurse duties in the urology operative room: 11 years of experience[J]. Asian J Urol, 2017, 4(2): 116-123.
[10] 王春灵.达芬奇手术机器人系统手术的护理配合[J].中国临床医学, 2013, 20(1): 87-88.
[11] 崔茜, 管春丽, 王涛. 机器人辅助后腹腔镜肾部分切除术的手术配合[J]. 中华腔镜外科杂志 (电子版), 2016, 9(5): 314-316.
[12] 王涛, 李丽霞, 董薪, 等. 全机器人辅助低温灌注下肾部分切除术的护理配合[J]. 中华腔镜外科杂志 (电子版), 2014, 7(4): 68-70.
[13] Sutton S, Link T, Makic M B. A quality improvement project for safe and effective patient positioning during robot-assisted surgery[J]. AORN J, 2013, 97(4): 448-456.
[14] 邵海燕, 李淑燕, 许瑛, 等. 机器人辅助腹腔镜肾部分切除术后小肾癌患者不同体位干预方法的效果研究[J]. 浙江医学, 2018, 40(10): 1133-1135.
猜你喜欢
家庭科学·新健康(2019年4期)2019-05-05
中外医疗(2017年24期)2017-11-15
海南医学(2016年8期)2016-06-08
海南医学(2016年8期)2016-06-08
中国继续医学教育(2015年3期)2016-01-06
健康必读(2015年11期)2015-12-04
医学研究杂志(2015年7期)2015-06-22
医学研究杂志(2015年2期)2015-06-10
天津医科大学学报(2015年3期)2015-06-05
中国当代医药(2015年9期)2015-03-01