机器人辅助腹腔镜下前列腺癌根治性切除术改良仰卧位与常规体位的对照研究
2023-06-20 05:52孙大鹏申兵乔芳芳余航李婉沁储铸刚罗光恒
机器人外科学 2023年2期
关键词:腹腔镜
孙大鹏 申兵 乔芳芳 余航 李婉沁 储铸刚 罗光恒
摘 要 目的:探讨第四代达芬奇机器人Xi系统辅助腹腔镜下前列腺癌根治性切除手术采取改良仰卧位的优势。方法:选取2019年12月—2021年1月在贵州省人民医院接受达芬奇机器人Xi系统辅助腹腔镜下前列腺癌根治性切除手术的90例患者为研究对象,按手术顺序随机将研究对象分为三组,分别为对照组A、对照组B和观察组C,每组各30例。对照组A采取常规头低脚高截石位,对照组B采用头低脚高“人”字形体位,观察组C采用改良仰卧位。比较三组手术体位摆放用时、手术用时、术中失血量及术中并发症的发生率。结果:所有手术均顺利完成,手术用时、术中失血量及相关术中并发症的发生率差异无统计学意义(P>0.05)。但采用设计改良仰卧体位摆放时间较常规采取截石位与“人”字形体位短(P<0.05)。结论:达芬奇手术机器人Xi系统辅助腹腔镜下前列腺癌根治性切除术中采用改良仰卧位,能够缓解常规体位拆卸托腿架带来的体力消耗,缩短摆放体位时间,预防常规体位术中可能带来的压力性损伤与术中并发症,值得推广。
关键词 手术机器人;腹腔镜;前列腺癌根治术;手术体位
中图分类号 R737 文献标识码 A 文章编号 2096-7721(2022)02-0115-05
Abstract Objective: To explore the advantages of modified supine position in laparoscopic radical prostatectomy assisted by Da Vinci Xi surgical system. Methods: 90 patients who underwent laparoscopic radical prostatectomy assisted by Da Vinci Xi surgical system in Guizhou Provincial Peoples Hospital from December 2019 to January 2021 were selected. 90 patients were randomly divided into control group A, control group B and observation group C based on their surgical sequences, with 30 cases in each group. Routine lithotomy-trendelenburg position were adopted in the control group A, split-leg position in the control group B, and the modified supine position in the observation group C. The positioning time, operating time, intraoperative blood loss and incidence of intraoperative complications of the three groups were compared. Results: All the surgeries were successfully completed. No significant difference on operation time, intraoperative blood loss and the incidence of related intraoperative complications were found (P>0.05). However, the positioning time of the modified supine position was shorter than that of the conventional lithotomy position and split-leg position (P<0.05). Conclusion: The modified supine position in laparoscopic radical resection of prostate cancer assisted by Da Vinci Xi surgical system could decrease the physical output caused by the removal of leg support in conventional position, shorten the positioning time, and prevent the possible pressure injury and intraoperative complications in conventional position, which is worth of popularization.
Key words Surgical robot; Laparoscope; Radical prostatectomy; Surgical position
前列腺癌(Prostate cancer,PCa)是老年男性常見泌尿系统恶性肿瘤之一,其发病率也逐年上升,根治性切除术是目前早期前列腺癌的首选治疗方法。达芬奇手术机器人凭借其高清的裸眼放大3D立体术野、灵活的机械臂和360°多方位旋转的腕关节器械,可以更加精准地完成前列腺癌根治术,其用时更短,且可保护周围神经,有助于术后尿控和性功能更好地恢复。但是,机器人辅助腹腔镜下前列腺癌根治性切除手术体位选择常规头低脚高截石位、臀部垫高“人”字形体位或其他体位暂无明确指南标准。贵州省人民医院达芬奇手术护理团队通过探索思考,对机器人辅助腹腔镜前列腺癌根治性切除手术采用改良仰卧位、常规截石位和“人”字形体位进行了对照观察,现将经验总结报道如下。
1 资料与方法
1.1 一般资料
选取2019年12月—2021年1月在我院进
行达芬奇手术机器人Xi系统辅助腹腔镜下前列腺癌根治性切除手术患者90例,年龄46~77岁,平均年龄61.5岁,根据手术顺序将纳入研究对象随机分为对照组A、对照组B和观察组C,每组各30例。对照组A采用头低脚高截石位,对照组B采用头低脚高“人”字形体位,观察组C采用改良仰卧位。纳入标准:所有患者均为列腺穿刺活检诊断为前列腺癌(T1~T2b);经全身ECT扫描等检查排除有无肿瘤远处转移;患者知情同意并签字认可。三组患者的基线资料比较,差异无统计学意义(P>0.05),具有可比性。
1.2 方法
1.2.1 体位摆放
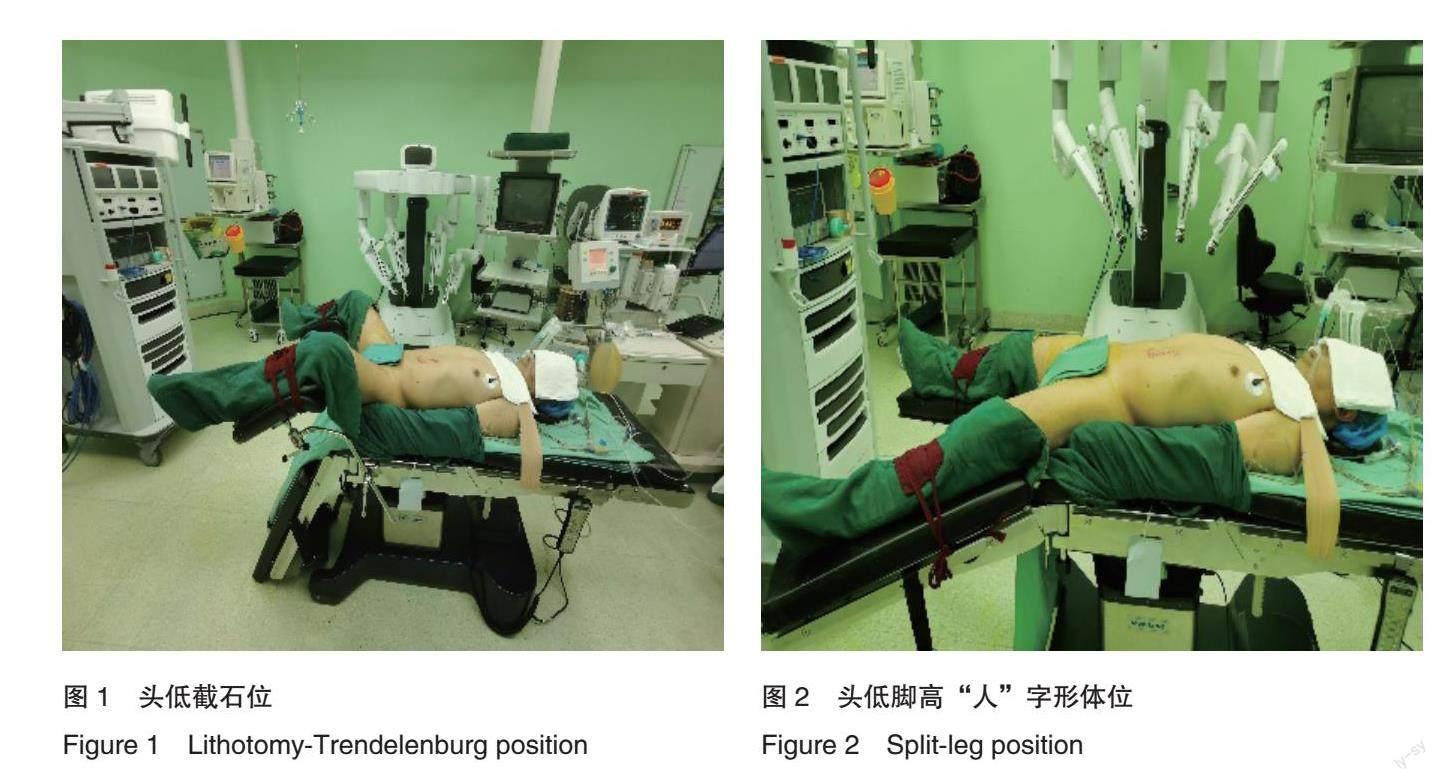
对照组A中的患者采取头低截石位。患者平卧于手术床上进行麻醉,提前将患者臀部与手术床背板下缘平齐。麻醉完成后,头部使用硅胶头圈保护和固定,肩部使用3M弹力绷带固定,手部静脉通道使用静脉延长管连接包裹于中单里自然紧贴患者身体两侧,在手术床髋关节平面放置托腿架,将两腿放于硅胶保护托腿架上,患者下肢需外展45°,髋关节需屈曲45°,膝关节需弯曲90°,使用腿带双腿约束固定,拧松螺丝取下腿板(如图1)。待手术医生完成所有Trocar穿刺后,应手术视野显露需要将手术床调节成头低脚高40°保留耻骨后间隙暴露,再将头板向上抬或垫上硅胶头圈,使患者头部和水平方向呈20°,避免头部过低引起脑部充血和眼睑水肿的发生。
对照组B 采用头低脚高“人”字形体位。患者平卧于手术床上,调整臀部与手术床背板下缘平齐,待麻醉完成后,头部使用硅胶头圈保护和固定,肩部使用3M弹力宽胶布固定,手部静脉通道使用静脉延长管连接包裹于中单里自然紧贴患者身体两侧,使患者双膝关节放于手术床腿板的折返位置,双腿分开50°~60°,足跟用硅胶垫保护,使用约束带固定双侧小腿。安置过程中注意患者保暖和保护患者隐私(如图2)。待手术医生完成所有Trocar穿刺后,应手术视野显露需要将手术床调节成至头低脚高40°保留耻骨后间隙。
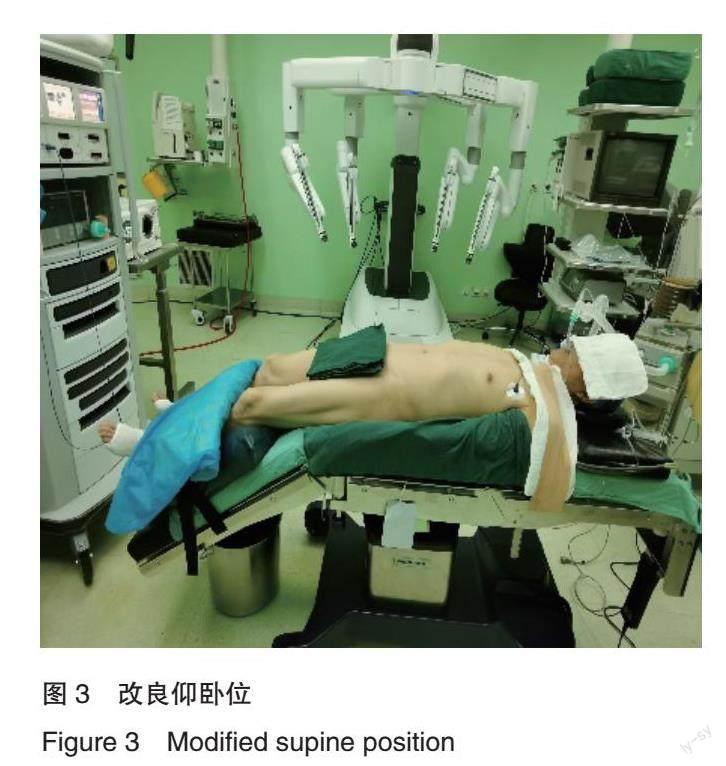
观察组C 采用改良仰卧位,患者进行麻醉前平卧于手术床,臀部与手术床背板下缘平齐,麻醉完成后,头部使用硅胶头圈保护,肩部使用3M弹力宽胶布与两侧床沿粘贴固定,手部静脉通道使用静脉延长管连接包裹于中单里自然紧贴患者身体两侧,腿板调节向下20°~25°膝关节自然下垂垫于硅胶软枕上约束带固定保护(如图3),再将手术床调节成头低20°~25°并使用软棉垫保护头面部。
1.2.2 观察指标
①体位摆放用时:使用手术间计时面板记录手术体位摆放所需时间;②手术时间:用手术间计时面板记录患者从建立Trocar到取出标本完成皮肤缝合所需时间;③术中出血量:通过带血纱布辅料情况及吸引器瓶刻度计算术中出血量;④发生并发症情况:采用2019年压力性损伤指南最新分期定义标准于术后查看患者全身皮肤情况;⑤深静脉血栓与腓总神经损伤发生率;⑥机器人二次泊位的发生率;⑦术者满意度。
1.2.3 统计学方法
所有数据均采用统计学软件SPSS 22.0進行分析,计量资料采用独立样本t检验,计数资料比较则采用 χ2检验,P<0.05为差异有统计学意义。
2 结果
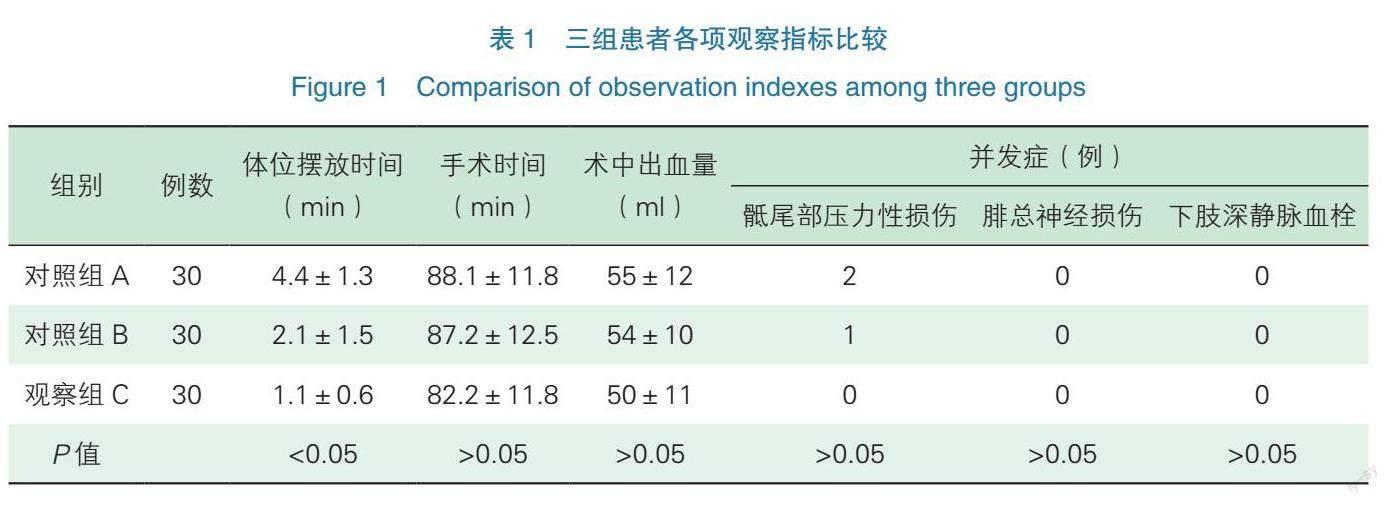
所有手术均顺利完成,三组患者,手术时间、术中出血量及相关术中并发症的发生率差异无统计学意义(P>0.05)。但采用设计改良仰卧体位(观察组C)摆放时间(1.1±0.6)min较对照组A(4.4±1.3)min和对照组B(2.1±1.5)min
短(P<0.05)。缩短摆放体位时间能够缓解常规体位拆卸托腿架带来的体力消耗,且术中视野显露清晰[1-2],可有效预防术中可能带来的压力性损伤与术中并发症,规避神经损伤与下肢深静脉血栓发生的风险[3-4]。
3 讨论
截石位是患者平卧手术床,待麻醉完成后将两侧托腿架分别安装于手术床上,待患者完成截石位摆放后固定双腿,再拧松固定螺丝将手术床腿板拆下;待手术结束后,需先安装两个腿板,然后将截石位患者摆放成平卧位后再取下托腿架,最后将患者从手术床上转移至对接车上。摆放截石位过程中耗时费力[5],托腿架笨重,而反复的体位摆放也会使工作量增大,从而严重影响手术接台衔接效率。另外,在反复调整安装和取下托腿架和腿板过程中还会有腿板跌落的安全隐患。
摆放“人”字形体位时需将手术床腿板的固定螺丝松开,将手术床腿板分开后拧紧固定螺丝,让患者双腿外展30°~40°。对于身材矮小、年纪较大、关节活动度差的患者,摆放此体位有一定难度,且会影响手术野暴露。待手术结束后需将手术床腿板合并再将患者从手术床上转移至对接车上[5-6],这会增加工作量。另外,患者双腿的外展也会对器械护士的器械桌摆放造成一定影响。
本团队所采用的改良仰卧位无需使用腿架和肩托,能够缩短体位摆放时间,大大降低护士工作负荷,让摆放体位的整个过程方便且省时省力,既能提高每台手术的衔接效率,也能减轻护士反复调整脚架腿板的工作强度。患者平卧于手术床后调节腿板向下20°~25°能够使膝关节自然下垂,提高了患者舒适度,避免对腘窝产生压力导致腓总神经的压迫,有效降低了神经损伤与下肢深静脉血栓发生的风险[6]。头低20°~25°使用软棉垫保护头面部[6-7],是为了避免手术过程机器人镜头损伤患者头面部,但头面部及胸部的倾斜角度不宜过大,防止颅内压及眼压增高。
综上所述,机器人辅助腹腔镜下前列腺癌根治性切除手术中采取改良式仰卧位不仅可以充分暴露手术部位,为流畅完成手术操作提供保障[7-8],缓解护士工作强度,提高手术效率,而且可以有效规避患者术中以及术后并发症的发生[8-10],保障手术安全、高效。
参考文献
[1] 羅敏. 达芬奇机器人辅助腹腔镜前列腺癌根治术手体位的优化[J]. 中华腔镜泌尿外科杂志, 2020, 4(16): 41-47.
[2] 谭炳山, 郭东华, 汤联. 机器人辅助腹腔镜根治性前列腺切除手术两种体位摆放的对照研究[J]. 护士进修杂志, 2019, 6(10): 10-32.
[3] 沈周俊. 机器人外科手术系统辅助腹腔镜在膀胱及前列腺手术中的优势[J].上海医学, 2010, 11(2): 40-43.
[4] 王蓉. 快速康复外科干预对达芬奇机器人辅助腹腔镜前列腺癌根治术患者康复效果的影响分析[J]. 中国医学前沿杂志, 2020, 3(25): 17-25.
[5] 汤联. 达芬奇机器人腹腔镜下前列腺癌根治术患者的围手术期整体护理[J]. 当代护士, 2018, 8(29): 26-30.
[6] WANG J, GUO X Z, WU Y Z. The application of Robocare nursing model in the whole nursing care of Da Vinci robot-assisted laparoscopic radical cancer surgery[J]. Asian Journal of Surgery, 2021, 4(10): 667-669.
[7] Koga H, Takanori O. Hepaticojejunostomy for choledochal cyst in children[J]. Journal of Pediatric Endoscopic Surgery, 2021, 2(7): 1-3.
[8] DUAN J S, SUN T, GE S L. A case of abdominal bleeding after mitral valvuloplasty assisted by da Vinci robotic surgery[J].Journal of Cardiac Surgery, 2020, 10(2): 683-685.
[9] Johnson B A. High-fidelity model for urethrovesical anastomosis in radical prostatectomy[J]. Journal of Endourology, 2019, 4(8): 331-336.
[10] WANG Y, MENG D, SUN X X. A prospective study of da vinci surgical robotic system with chest wall external nursing interventions[J]. Chinese Journal of Lung Cancer, 2020, 6(22): 487-491.
猜你喜欢
腹腔镜外科杂志(2022年7期)2022-08-16
临床医药文献杂志(电子版)(2017年11期)2017-05-17
中国内镜杂志(2017年2期)2017-03-20
实用临床医学(2016年8期)2016-06-08
腹腔镜外科杂志(2016年11期)2016-06-01
腹腔镜外科杂志(2016年9期)2016-06-01
中国卫生标准管理(2015年16期)2016-01-20
中国医疗器械杂志(2015年5期)2015-12-31
卫生职业教育(2014年16期)2014-05-16
西南军医(2014年1期)2014-02-03