经膀胱入路机器人辅助根治性前列腺切除术中国专家共识(2021版)
2023-06-20 06:16
机器人外科学 2023年2期

摘 要 前列腺癌在世界范围内的发病率居男性恶性肿瘤的第二位,在我国亦呈快速上升趋势。我国多家医疗中心根据本单位开展经膀胱入路机器人辅助前列腺癌根治术的经验,结合国际前列腺癌外科治疗的最新理论和经验,制定了经膀胱入路实施机器人辅助前列腺癌根治术的专家共识。
关键词 经膀胱入路;机器人根治性前列腺切除术;专家共识
中图分类号 R699 文献标识码 A 文章编号 2096-7721(2022)02-0149-12
Abstract The incidence of prostate cancer is the second most common malignant tumor in men worldwide, and it is also rapidly rising in China. Based on our experience in performing transvesical robot-assisted radical prostatectomy from several medical centers in China, integrating with the latest international theories and experiences in the surgical treatment of prostate cancer, the expert consensus on conducting robot-assisted radical prostatectomy via the transvesical approach is established to guide clinical practice.
Key words Transvesical approach; Robot-assisted radical prostatectomy; Expert consensus
隨着手术微创技术的发展,21世纪的机器人手术正带领外科领域进入第三次大变革时代,机器人手术的高清3D手术视野和灵活的手术器械使其深受外科医生的喜爱[1]。机器人辅助根治性前列腺切除术(Robot-assisted radical prostatectomy,RARP)最初由法国的Abbou于2000年报道,这也使其成为该手术的先锋者[2]。该术式在前列腺癌术后早期的肿瘤控制、尿控和勃起功能恢复预后不亚于开放手术和腹腔镜手术[1]。随后,RARP快速发展,加上对前列腺解剖更进一步的认识,手术入路也越来越多。目前较为普及和公认的保留神经RARP术,以膀胱为参照物,按初始入路可分为前入路和后入路两类:一类是从膀胱前方开始寻找分离平面,即经耻骨后间隙入路的VIP(Vattikuti institute prostatectomy)术式[3-4]为代表的前入路,具有操作空间大、解剖标志明显、尿道—膀胱颈吻合便利等优势;但较好地保留和保护神经血管束(Neurovascular bundle,NVB)需要较长的学习曲线,且技术要求较高。另一类是从膀胱后方开始寻找分离平面,即以Bocciardi术式为代表的保留耻骨后间隙或经膀胱直肠陷凹 RARP术[5],手术步骤相对前入路较少,但术中视野空间显露较差,学习曲线较长,拔除导尿管7d内完全尿控的比例可高达90%;在术前可正常性生活的患者中,>40%的患者在术后1个月即进行首次性生活,>70%的患者术后1年内恢复性生活。
随着机器人微创外科技术的不断发展,以及为了更好地实现“三连胜”的手术目标,RARP的手术入路也有不同程度的创新和发展。其中经膀胱入路是一种通过膀胱腔内分离前列腺及周围组织结构的顺行路径,有研究证实经膀胱入路RARP是治疗局限性低风险前列腺癌的可选手术方式之一[6-8],同时经膀胱入路与后入路RARP在术后即刻尿控率方面结果相似,并且均优于前入路[9-10]。为更好地规范及推广经膀胱入路RARP(Transvesical robot-assisted radical prostatectomy,TvRARP)和单孔腹膜外经膀胱RARP术(Single-port extraperitoneal TvRARP,SETvRARP),多家医疗中心在总结本单位开展此类手术的基础上,邀请具有丰富机器人手术经验的国内专家,参考国内外相关文献,针对经膀胱入路的患者选择、术中操作要点、手术并发症防治等制定本共识。
1 经膀胱入路的发展历程、理论基础与关键技术设计
1.1 发展历程
目前,针对前列腺体积超过100ml的良性前列腺增生的患者,EAU指南中已将经膀胱机器人单纯前列腺切除术列为可选术式之一,手术方法和步骤已规范化[11],提示经膀胱对前列腺进行解剖具有可行性。Desai M M等[12]在2008年首次采用单孔手术机器人系统(Da Vinci-S robotic system),在尸体上尝试TvRARP,以保护耻骨前列腺韧带、盆内筋膜、前列腺丛、神经血管束等对术后尿控及勃起功能恢复具有重要意义的解剖结构。我国的高新教授针对低危局限性前列腺癌患者(T1-T2a N0M0期),在2011年首次报道了单孔经膀胱腹腔镜根治性前列腺切除术[13],随后该团队报道了2010—2015年实施的39例手术,平均随访39个月,期间仅1例出现尿道狭窄,无生化复发生存率94.9%[14]。经膀胱入路的手术操作局限于前列腺周围的骨盆空间,对周围其他组织的损伤较少,初步手术效果提示该入路在治疗低危局限性前列腺癌患者方面,术后控尿、勃起功能和肿瘤控制效果是比较理想的[14]。王共先教授团队首次报道了采用Da Vinci Si/Xi手术机器人经膀胱入路完成RARP的手术技术与初步经验[15]。研究结果表明,TvRARP是低危局限性前列腺癌患者手术治疗的一种可选术式,术后1周拔除导尿管即刻尿控比较理想,其远期的功能恢复和肿瘤控制仍有待进一步长期随访。郭剑明教授团队于2019年首次在国内报道了应用Da Vinci Si行耻骨上经膀胱入路完成单孔RARP[16]。王共先教授团队于2020年首次报道了应用Da Vinci Xi探索开展单孔腹膜外经膀胱RARP术(SETvRARP)[17]。
1.2 理论基础与关键技术设计
1.2.1 初始入路
除了走形于前列腺后外侧的神经血管束之外,被附于前列腺前表面的神经血管网(Veil of Aphrodite,阿芙罗狄蒂面纱)也对患者术后尿控和勃起功能的恢复具有重要意义[4]。以Bocciardi术式(后入路)为代表的保留耻骨后间隙或经膀胱直肠陷凹 RARP术[5]从无神经分布的膀胱后方开始寻找分离平面,手术范围相对较小,步骤较少,拔除导尿管7d内完全尿控的比例高达90%。术后1周拔除导尿管即刻尿控恢复的理想程度也在随机对照临床试验中得到了进一步验证[18]。采用经膀胱入路实施RARP术,在切开膀胱、暴露尿道内口及双侧输尿管开口、沿尿道内口环形切开黏膜之后,便采用后入路手术分离技术,先分离位于前列腺后方的输精管和精囊,随后在无神经分布的前列腺后表面找到正确的筋膜外、筋膜间和筋膜内层面,并以此平面为参考,继续实施后续对前列腺侧面和位于前列腺后外侧的血管蒂与神经血管束(NVB)的分离。
1.2.2 前列腺血管蒂和神经血管束的分离
前列腺血管蒂和对术后尿控与勃起功能具有重要意义的神经血管束位于前列腺后外侧4~5点(右)和7~8点(左)方位。经膀胱入路实施RARP术在暴露这两个关键结构时,可借鉴采用侧入路技术[19],分离右侧时先在3点处构建前列腺包膜和前列腺周围筋膜之间的分离平面。该平面构建充分之后,先用Hem-o-Lok紧贴前列腺包膜夹闭并冷刀离断位于4~5点处的前列腺血管蒂,随后在前列腺包膜与前列腺周围筋膜或盆侧筋膜脏层之间(筋膜内或筋膜间层面),对走形于后外侧的NVB进行顺行钝性分离,实现对NVB主干的保留。同法解剖分离左侧NVB。
1.2.3 膀胱尿道吻合
经膀胱入路的膀胱尿道吻合的操作習惯与前入路几乎完全一致。而Bocciardi术式(后入路)在膀胱后方实施膀胱尿道吻合,其操作习惯有别于大多数泌尿外科医师所熟悉的前入路。
2 患者选择
2.1 适应证
临床局限性、复发风险为低风险的前列腺癌,术前影像学检查未见癌灶包膜外侵犯;tPSA<20ng/mL;Gleason评分≤7;临床分期cT1-T2c N0M0;前列腺体积<80ml;患者预期寿命>10年。
2.2 禁忌证
非局限性前列腺癌(≥T3);tPSA>20ng/ml;Gleason 评分>7;预期寿命<10年;未纠正的凝血功能障碍;患者有严重基础疾病如严重的肺功能不全等无法耐受手术者以及患者或家属不接受根治性前列腺切除术者。
3 患者术前准备
术前常规对患者进行全面而系统的体格检查、实验室检验及影像学检查,体格检查与实验室检验主要包括直肠指检、心肺功能检测、心电图、血常规、血生化、凝血功能、血型等;影像学检查主要包括前列腺MRI、骨扫描、胸部CT检查等评估患者基础状态及肿瘤临床分期。术前良好的营养状态可以增强抵御感染等风险的能力,术前可维持正常饮食。按全麻要求术前禁食6h、禁水4h,术前晚口服泻药进行胃肠道清洁准备,排空胃肠道的残留物。术前常规预防性使用广谱抗生素。
4 手术室准备、患者体位及套管位置
4.1 TvRARP/SETvRARP患者体位
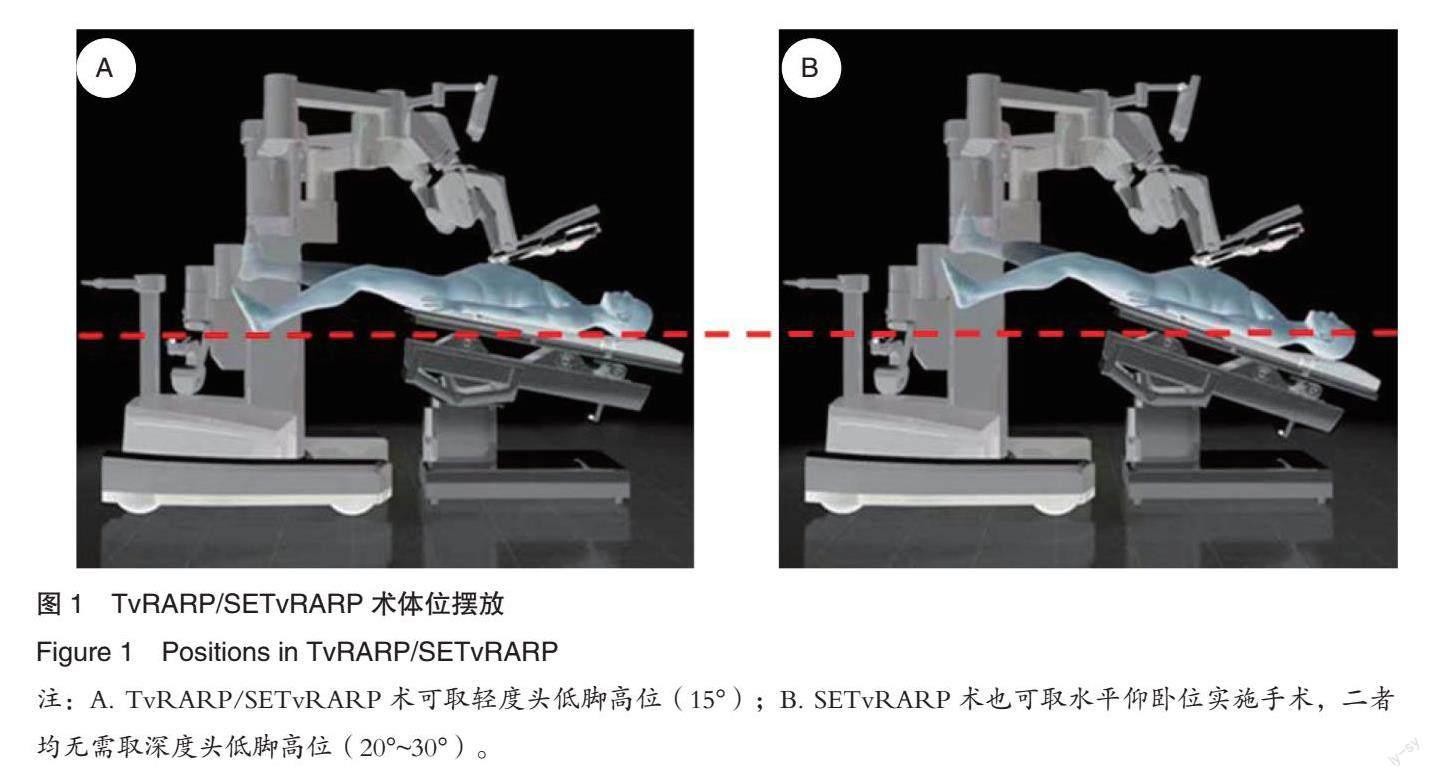
患者采用气管插管全身麻醉。TvRARP取轻度头低脚高(约15°)截石位,双下肢分开80°~90°,由于镜头在术中绝大多数时间均位于膀胱内,不易受到腹腔内容物的干扰[15]。而SETvRARP术中镜头始终位于膀胱内,完全不受腹腔内容物的干扰,因此可同耻骨后腹膜外前列腺癌根治术,可取轻度头低脚高位或水平仰卧位实施手术(如图1)。术前常规消毒、铺单,插入14F导尿管,用适量生理盐水固定气囊。
4.2 TvRARP/SETvRARP套管摆位
4.2.1 TvRARP套管摆位
镜头套管戳孔(C)位于脐上或脐下1cm处,8mm的R1、R2机械臂套管戳孔分别位于镜头套管戳孔两侧,8mm的R3机械臂套管戳孔位于R2机械臂套管戳孔外侧,12mm助手套管戳孔(A1)位于1机械臂套管戳孔外侧,如图2A。
4.2.2 SETvRARP套管摆位
单孔PORT的放置:排空膀胱后,经导尿管向膀胱内注入400~600ml生理盐水,使膀胱处于充分充盈状态,此时应可在耻骨联合上方至少2横指水平触及膀胱;在脐下作一长约5cm的纵形或横形切口,该切口大约位于脐与耻骨联合的中点处,根据患者体型可适当上移或下移;切开皮肤各层,经白线依次钝性分离腹直肌、膀胱前脂肪、膀胱壁,直至显露出膀胱黏膜层面;用6~8根间断缝线将膀胱壁切缘与皮肤固定;置入单孔Port,使2个8~12mm通道位于两侧(用于放入Da Vinci Xi手术机器人系统的8mm套管和左、右手操作器械)、第3个8~12mm通道位于尾侧(用于放入da Vinci Xi手术机器人系统的8mm套管和镜头),另一5~12mm通道位于头侧(用作助手孔,方便5mm吸引器和10mm Hem-o-Lok施夹器的使用),如图2B。
4.3 TvRARP/SETvRARP手术器械
4.3.1 TVRARP手术器械
4.3.1.1 机械臂:Maryland bipolar双极电凝、Monopolar单极电剪、Prograsp抓钳、机器人持针器。
4.3.1.2 助手操作器械:5mm吸引器,5mm或12mm Hem-o-Lok施夹器,5mm腹腔镜持针器,5mm抓钳。
4.3.2 SETvRARP手术器械
4.3.2.1 机械臂:Maryland bipolar双极电凝、Monopolar单极电剪、机器人持针器;
4.3.2.2 助手操作器械:5mm吸引器,5mm Hem-o-Lok施夹器,5mm腹腔镜持针器,5mm抓钳。
4.4 机器人床旁车定泊
Si机器人床旁车以脐正中线为轴向患者分开的两腿之间移动。Xi机器人床旁车因机械臂悬吊可旋转,摆放定泊位置更加灵活。
4.5 TvRARP/SETvRARP气腹压设定
4.5.1 TvRARP气腹压
同其他经腹腔手术:12~15mmHg,气腹压过高可能导致过多的二氧化碳在体内蓄积,引发有害的血气变化,尤其在高龄患者需特别注意;对前列腺窝进行止血时可适当降低气腹压至5~10mmHg,以发现潜在的出血点。
4.5.2 SETvRARP膀胱内气压
有条件的单位可选用自动恒压泵装置,以保持手术环境始終处于恒压和视野清晰;对前列腺窝止血时可适当降低气腹压至5~10mmHg,以发现潜在的出血点;在实施膀胱尿道吻合时,需降低膀胱内气压至5~10mmHg,以便实现无张力吻合。
5 淋巴结清扫术
行TvRARP和SETvRARP的前列腺癌患者因适应证均选局限性低危患者,常不需行盆腔淋巴结清扫。
研究表明,术前评估淋巴结转移风险超过5%的患者应同时接受扩大盆腔淋巴结清扫术[20],
但与局限性盆腔淋巴结清扫相比,扩大清扫使其并发症发生风险增加了3倍[21]。因此,目前指南推荐低危患者不建议实施扩大盆腔淋巴结清扫术,且不建议实施局限性盆腔淋巴结清扫术。另外,不建议采取术中冰冻病理检查以明确是否存在淋巴结转移。
如术中评估需要行淋巴清扫,TvRARP术可在实施根治性前列腺切除之前或之后进行盆腔淋巴结清扫术[15];SETvRARP术无法同时实施盆腔淋巴结清扫术,除非重新经腹腔进行套管摆位和定泊。
标准淋巴结清扫包括闭孔神经、髂内外血管周围的淋巴结以及脂肪组织;扩大淋巴结清扫范围包括闭孔神经、髂内外血管、髂总血管周围及骶前淋巴结和脂肪组织。在进行盆腔淋巴结清扫时注意预防淋巴瘘、闭孔神经损伤等手术并发症。手术中尽可能地闭合淋巴管,尤其对于藏于脂肪中的淋巴管,可考虑采用Hem-o-Lok夹闭。
6 TvRARP/SETvRARP的手术步骤与技术要点解析
6.1 TvRARP/SETvRARP的手术步骤
6.1.1 TvRARP手术步骤
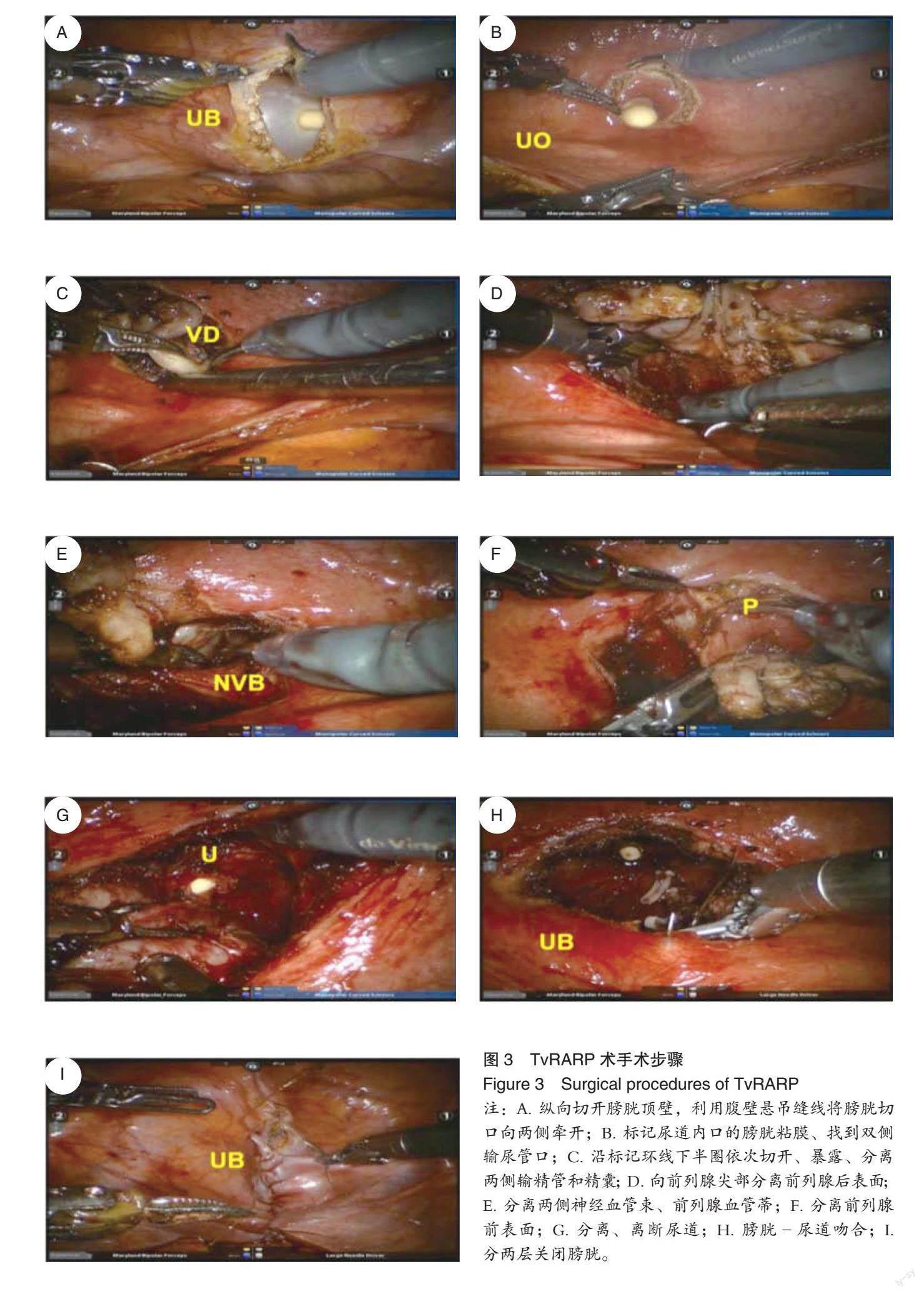
6.1.1.1 纵形切开膀胱后上壁5~8cm,利用腹壁悬吊缝线将膀胱切口向两侧牵开,显露双侧输尿管开口,明确其与尿道内口、前列腺的关系。
6.1.1.2 用单极电剪沿尿道内口作一圆弧形切口,切开膀胱黏膜及肌层。
6.1.1.3 沿此弧形切口下半圈向深面解剖分离,直至充分暴露和游离两侧输精管和精囊。
6.1.1.4 在前列腺后方依次打开筋膜外、筋膜间和筋膜内层次,显露前列腺包膜,紧贴前列腺包膜分离前列腺后表面与直肠之间间隙直至前列腺尖部后方。
6.1.1.5 在前列腺侧面4~5点处用马里兰钳紧贴前列腺包膜分离出间隙,用电剪推开盆侧筋膜脏层,显露前列腺右侧血管蒂;紧贴前列腺包膜上Hem-o-Lok并冷刀剪断前列腺右侧血管蒂;同法处理左侧血管蒂;此时前列腺左右神经血管束(NVB)已分别被推向外侧。
6.1.1.6 如术中发现前列腺癌灶侵犯包膜,则可在盆侧筋膜外间隙层面分离,行筋膜外前列腺切除。
6.1.1.7 沿尿道内口上半圈弧形切口,向深面分离至前列腺包膜,并紧贴包膜向前分离前列腺前表面直至尖部,此分离过程中注意将DVC向上推开以免误伤,显露尿道; 分离、离断尿道、移除前列腺标本。
6.1.1.8 术野彻底止血后,用RB-1针带4-0倒刺线连续缝合,先将膀胱颈作网球拍式缝合以缩小吻合口并远离输尿管开口,然后完成膀胱-尿道吻合,留置20~22Fr三腔硅胶导尿管;分黏膜肌层和外膜层两层连续缝合依次关闭膀胱切口。
6.1.1.9 再次检查腹腔有无出血,撤机,适当延长镜头套管戳孔,取出标本,关闭各套管戳孔及切口,留置导尿管,不留置腹腔引流管,术毕(如图3)。
6.1.2 SETvRARP手术步骤
6.1.2.1 机器人镜头经单孔Port进入膀胱后,显露观察双侧输尿管开口,明确其与尿道内口、前列腺的关系(如图4A)。
6.1.2.2 用单极电剪沿尿道内口作一圆弧形切口,切开膀胱黏膜及肌层(如图4B)。
6.1.2.3 沿此弧形切口下半圈向深面解剖分离,直至充分暴露和游离两侧输精管和精囊(如图4C)。
6.1.2.4 在前列腺后方依次打开筋膜外、筋膜间和筋膜内层次,显露前列腺包膜,紧贴前列腺包膜分离前列腺后表面与直肠之间间隙直至前列腺尖部后方。
6.1.2.5 在前列腺侧面4~5点处用马里兰钳紧贴前列腺包膜分离出间隙,用电剪推开盆侧筋膜脏层,显露前列腺右侧血管蒂(如图4D);紧贴前列腺包膜,用Hem-o-Lok夹及冷刀夹闭、离断前列腺右侧血管蒂(如图4E);同法处理前列腺左侧血管蒂;此时前列腺左右神经血管束(NVB)已分别被推向外侧。
6.1.2.6 如术中发现前列腺癌灶侵犯包膜,则可在盆侧筋膜外间隙层面分离,行筋膜外前列腺切除。
6.1.2.7 沿尿道内口上半圈做弧形切口,向深面分离至前列腺包膜,并紧贴包膜向前分离前列腺前表面直至尖部,此分离过程中注意将DVC向上推开以免误伤,显露尿道(如图4F)。
6.1.2.8 分离、离断尿道、移除前列腺标本(如图4G)。
6.1.2.9 术野彻底止血后,用RB-1针带3-0单针或双针倒刺线连续缝合,先将膀胱颈作网球拍式缝合以缩小吻合口并远离输尿管开口,然后完成膀胱-尿道吻合(如图4H),留置F20三腔硅胶导尿管。
6.1.2.10 撤去机械臂,经单孔套管完整取出前列腺标本,分层关闭膀胱及腹壁切口,撤机;留置导尿管,不留置腹腔引流管。
6.2 技术要点解析
6.2.1 TvRARP/SETvRARP膀胱切开的方向(横向或纵向)
膀胱逼尿肌由三层肌纤维组成(除三角区之外):纵向走形的内层肌纤维、环状走形的中层肌纤维和纵向走形的外层肌纤维。取横向切口,则横断了3层膀胱肌纤维,而纵向切口仅横断中层的环状肌纤维。
TvRARP术中,取纵向膀胱上壁切口,可通过留置在两侧切缘、向两侧牵引的留置缝线,将纵向切口撑开呈菱形,以此获得充分的膀胱内结构的暴露。
SETvRARP术中,皮肤切口与膀胱切口走形方向需保持一致;前正中线切口可不横断腹直肌,损伤较小;横向走形的 Pfannenstiel切口則过于靠近尾侧,单孔操作通道与前列腺—膀胱轴线之间的夹角过大,可能不利于术中操作。
综上所述,TvRARP/SETvRARP术宜纵向切开膀胱。
6.2.2 TvRARP是否采用悬吊缝线
如前所述,术中取纵向膀胱上壁切口,可通过留置在两侧切缘、向两侧牵引的留置缝线,将纵向切口撑开呈菱形,以此获得充分的膀胱内结构的暴露。若术者熟练也可考虑不留置缝线。
6.2.3 TvRARP/SETvRARP膀胱尿道吻合的缝针与缝线
据报道,可采用2根反向走行的RB-1针带3-0倒刺线完成膀胱尿道吻合,最终的线结打在膀胱-尿道吻合口外面,以避免膀胱内线结对三角区的刺激(可能导致术后尿痛)和结石形成[15]。其他的针线选择包括1根3-0倒刺线和1根反向走形的3-0 PDS线、单根3-0倒刺线,或单根3-0 PDS线等。
6.2.4 TvRARP/SETvRARP膀胱的缝合方式
分两层分别关闭膀胱粘膜/浅肌层和深肌层/浆膜层。可选缝线包括3-0倒刺线、3-0普通薇乔线、3-0 PDS线等。缝合方式为连续缝合。
6.2.5 TvRARP/SETvRARP术后引流
若未同时进行盆腔淋巴结清扫,可不留置膀胱外的盆腔引流管,仅留置导尿管引流膀胱。也有学者提出以耻骨上膀胱造瘘管替代导尿管引流膀胱,患者术后的不适感更低[22]。
7 主要手术并发症的预防及处理
7.1 输尿管口、输尿管损伤
TvRARP/SETvRARP术中发生输尿管口及输尿管损伤较少见,因其可膀胱内直视下观察输尿管开口位置。损伤一般发生于前列腺体积较大、中叶显著突入膀胱者,由于其腺体过大靠近输尿管口致使不易观察。术者考虑在分离前列腺过程中存在输尿管损伤风险者,可考虑术中逆行留置输尿管支架管。
7.2 直肠损伤
肿瘤向后方浸润、经直肠前列腺穿刺活检、盆腔放疗等可导致前列腺与直肠间解剖平面不清晰,对术前评估直肠损伤高风险的患者可考虑术前肠道准备;术中可考虑使用直肠探条协助定位,主刀医师与助手协作以充分暴露离前列腺后表面与直肠前壁间的分离平面。出现直肠损伤者可视损伤情况采取不同的措施。绝大多数情况下可行一期修补、留置肛管、术后短期辅助肠外营养;或术中可请普外科医师协助结肠造瘘、二期修补。选择早期、局限、低危病例并规范手术操作,常可避免发生此并发症。
7.3 大出血
在根治性前列腺切除术中最主要的出血来自于背血管复合体(Doral vascular complex,DVC)和前列腺侧血管蒂的损伤。经膀胱根治性前列腺切除,术中如按前述要求进行规范操作,常可避免DVC和前列腺侧血管蒂的误伤。
7.4 吻合口尿漏
常因膀胱尿道吻合时吻合口张力过大、对合不佳造成。行膀胱尿道吻合时应尽量减少张力、对合好。当术后出现尿漏尿外渗时,应适当延长导尿管留置时间。
7.5 尿道狭窄
狭窄的发生通常由于膀胱尿道吻合口过小或尿漏发生引起,可行尿道膀胱造影协助诊治。确有发生时可考虑行尿路扩张或经尿道电切处理。
7.6 尿失禁
TvRARP/SETvRARP因可最大程度保护尿控肌群等结构,从而获得较好的术后即刻尿控优势。
7.7 勃起功能障碍
TvRARP/SETvRARP通常可保留性勃起神经血管束NVB,从而使术后勃起功能得到更好的保护和恢复。术中应尽量使用冷刀以避免性勃起神经热损伤。
7.8 切缘阳性
机器人经膀胱根治性前列腺术通常选择早期、癌灶局限、低危患者,如果适应证选择合适且手术操作严谨规范,切缘阳性率应不高。但由于经膀胱术式有一定的学习曲线,初开展者可能会发生切缘阳性。对于切缘阳性的患者,术后可选择辅助性内分泌治疗或辅助性放疗。
8 手术注意事项
TvRARP/SETvRARP因其手术区域相对狭小,开展该术式初期建议选取前列腺体积较小者(< 50g);得益于对患者的严格筛选,开展TvRARP/SETvRARP初期选取肿瘤负荷较低的局限性前列腺癌患者,可保证较好的肿瘤控制效果。
鼓励患者采取加速康复外科理念和措施,在无特殊不适或其他全身情况的前提下,酌情术后6~12h在严密监护下尝试下床活动;肛门排气后逐渐恢复正常饮食。SETvRARP属腹膜外途径,对腹腔内脏器几乎无干扰,可适当提早恢复正常饮食的时间。常规术后7d拔除导尿管[15]。术后随访计划参考最新指南中对RARP术后患者的随访管理。
9 TvRARP的应用现状与展望
经膀胱入路是一种顺向分离的术式。相较其他入路而言,该术式具有手术步骤简便、可行性高等特点,同时具有较好的术后拔除导尿管即刻尿控优势。有研究表明经膀胱入路具有后入路类似的尿控优势,优于前入路即刻尿控效果[9-10]。因此经膀胱入路是治疗局限性低风险前列腺癌的可选术式之一,其远期肿瘤控制效果、尿控优势及对性功能恢复影响有待进一步长期随访研究。
随着精准医疗概念的提出,外科手术也更加趋于微创化精准化发展,目前经膀胱入路也由多孔经腹腔方式发展成腹膜外单孔方式。近期已有多篇单孔经膀胱入路研究报道,也证实该路径是一种安全、可行的替代术式[17]。其具有多孔经膀胱同样的技术优势,尤其更适合肥胖、既往有腹部手术史以及基础状况较差的患者;该路径采用轻度头低脚高位或者平卧位,但因其无法执行盆腔淋巴结清扫,应严谨选择合适病例。
随加速康复外科理念的临床应用,RARP的围手术期临床疗效也被进一步优化;经膀胱入路的手术效果也将进一步提升。目前虽已有研究证实经膀胱入路是一种安全、有效、可推广的技术,仍需更大样本、多中心的随机对照临床试验进一步证实。
《经膀胱入路机器人辅助根治性前列腺切除术
中国专家共识(2021版)》讨论与审定专家
(按姓氏音序排列)
陈凌武(中山大学附属第一医院)
陈 明(东南大学附属中大医院)
崔心刚(海军军医大学第三附属医院)
郭剑明(复旦大学附属中山医院)
经 霄(浙江大学医学院附属第二医院)
马 鑫(中国人民解放军总医院泌尿外科医学部)
任善成(海军军医大学附属长征医院)
谭万龙(南方医科大学南方医院)
王德林(重庆医科大学附属第一医院)
王 东(四川省医学科学院·四川省人民医院)
王共先(南昌大学第一附属医院)
王林辉(海军军医大学附属长海医院)
王 龙(中南大学湘雅三医院)
汪 朔(浙江大学医学院附属第一医院)
魏 强(四川大学华西医院)
夏 丹(浙江大学医学院附属第一医院)
徐丹枫(上海交通大学医学院附属瑞金医院)
姚 欣(天津市肿瘤医院)
张大宏(浙江省人民医院)
张 旭(中国人民解放军总医院泌尿外科医学部)
张雪培(郑州大学第一附属医院)
周芳坚(中山大学附属肿瘤医院)
执笔专家:
王共先(南昌大学第一附属医院)
周晓晨(南昌大学第一附属医院)
秘书:
周晓晨(南昌大学第一附属医院)
参考文献
[1] Pasticier G, Rietbergen J B, Guillonneau B, et al. Robotically assisted laparoscopic radical prostatectomy: feasibility study in men [J]. European Urology, 2001, 40(1): 70-74.
[2] Abbou C C, Hoznek A, Salomon L, et al. Remote laparoscopic radical prostatectomy carried out with a robot. Report of a case [J]. Progres En Urologie, 2000, 10(4): 520-523.
[3] Menon M, Tewari A, Peabody J, et al. Vattikuti Institute prostatectomy: technique [J]. J Urol 2003, 169(6):2289-2292.
[4] Savera At K S, Badani K, Stark A T, et al. Robotic radical prostatectomy with the "Veil of Aphrodite" technique: histologic evidence of enhanced nerve sparing [J]. Eur Urol, 2006, 49(6):1065-1073.
[5] Galfano A, Grimaldi S, Petralia G, et al. A new anatomic approach for robot-assisted laparoscopic prostatectomy: a feasibility study for completely intrafascial surgery [J]. Eur Urol, 2010, 58(3):457-461.
[6] 周曉晨, 胡兵, 傅斌, 等. 3种机器人辅助腹腔镜根治性前列腺切除术手术入路对比研究:前入路、后入路及经膀胱入路 [J]. 临床泌尿外科杂志, 2019, 34(7): 501-506.
[7] ZHOU X, FU B, ZHANG C, et al. Transvesical robot-assisted radical prostatectomy: initial experience and surgical outcomes [J]. BJU Int, 2020, 126(2): 300-308.
[8] Martini A, Falagario U G, Villers A, et al. Contemporary Techniques of prostate dissection for robot-assisted prostatectomy [J]. Eur Urol, 2020, 78(4): 583-591.
[9] DENG W, JIANG H, LIU X, et al. Transvesical retzius-sparing versus standard robot-assisted radical prostatectomy: a retrospective propensity score-adjusted analysis [J]. Front Oncol, 2021. DOI: 10.3389/FONC.2021.687010.
[10] DENG W, ZHANG C, JIANG H, et al. Transvesical versus posterior approach to retzius-sparing robot-assisted radical prostatectomy: a retrospective comparison with a 12-month follow-up [J]. Front Oncol, 2021. DOI: 10.3389/FONC.2021.641887.
[11] Meyer D, Weprin S, Zukovski E B, et al. Rationale for robotic-assisted simple prostatectomy for benign prostatic obstruction [J]. Eur Urol Focus, 2018, 4(5): 643-647.
[12] Desai M M, Aron M, Berger A, et al. Transvesical robotic radical prostatectomy [J]. BJU Int, 2008, 102(11):1666-1669.
[13] 龐俊, 黄文涛, 温星桥, 等. 经膀胱单孔腹腔镜前列腺癌根治术:附2例报告 [J]. 中华腔镜泌尿外科杂志(电子版), 2011, 5(2): 91-95.
[14] JIANG D G, HUANG Q X, PANG J, et al. Transvesical single-site laparoscopic radical prostatectomy of 39 cases: technique and clinical outcomes [J]. Zhonghua Wai Ke Za Zhi, 2016, 54(10):751-754.
[15] ZHOU X, FU B, ZHANG C, et al. Transvesical robot-assisted radical prostatectomy: initial experience and surgical outcomes [J]. BJU Int, 2020, 126(2):300-308.
[16] 姜帅, 许培榕, 姚家喜, 等. 耻骨上经膀胱单孔机器人前列腺癌根治术的初步尝试 [J]. 中国临床医学, 2019, 26(2): 215-217.
[17] 周晓晨, 张成, 傅斌, 等. 单孔经膀胱机器人根治性前列腺切除术:一种保护术后尿控的新术式 [J]. 机器人外科学杂志(中英文), 2020, 1(1): 11-17.
[18] Dalela D, Jeong W, Prasad M A, et al. A pragmatic randomized controlled trial examining the impact of the retzius-sparing approach on early urinary continence recovery after robot-assisted radical prostatectomy[J]. Eur Urol, 2017, 72(5):677-685.
[19] Mattei A, Naspro R, Annino F, et al. Tension and energy-free robotic-assisted laparoscopic radical prostatectomy with interfascial dissection of the neurovascular bundles [J]. Eur Urol, 2007, 52(3):687-694.
[20] Dell'Oglio P, Abdollah F, Suardi N, et al. External validation of the European association of urology recommendations for pelvic lymph node dissection in patients treated with robot-assisted radical prostatectomy [J]. J Endourol, 2014, 28(4):416-423.
[21] Briganti A, Karakiewicz P I, Chun F K-H, et al. Complications and other surgical outcomes associated with extended pelvic lymphadenectomy in men with localized prostate cancer [J]. Eur Urol, 2006, 50(5):1006-1013.
[22] Galfano A, Secco S, Panarello D, et al. Pain and discomfort after Retzius-sparing robot-assisted radical prostatectomy: a comparative study between suprapubic cystostomy and urethral catheter as urinary drainage [J]. Minerva Urol Nefrol, 2019, 71(4):381-385.
猜你喜欢
中国民间疗法(2021年6期)2021-06-09
中华肩肘外科电子杂志(2020年1期)2020-12-20
恋爱婚姻家庭·养生版(2020年9期)2020-10-20
家庭医学(下半月)(2020年3期)2020-05-30
家庭医学(下半月)(2020年3期)2020-05-30
家庭医学(下半月)(2020年3期)2020-05-30
中国生殖健康(2019年7期)2019-01-06
反射疗法与康复医学(2017年4期)2017-06-05
西南国防医药(2016年7期)2016-12-01
中国卫生标准管理(2015年6期)2016-01-14