
植保无人飞机研究现状与发展趋势
2023-06-19 09:10李香帅刘晓慧闫晓静袁会珠
现代农药 2023年3期
李香帅,刘晓慧,闫晓静,袁会珠
(中国农业科学院植物保护研究所,北京 100193)
随着科技的不断进步和社会的不断发展,植保无人飞机已经成为现代农业生产的重要工具之一。植保无人飞机可以通过搭载各种传感器和设备,实现对农作物快速、准确、高效的病虫害监测和植保作业。2014—2016年,我国植保无人飞机多处于试验阶段,其保有量不足千架,防治面积在千万亩次左右[1]。从2016年开始,随着我国“十三五”重点研发计划项目的实施,我国植保无人飞机进入高速发展阶段[2]。据中华人民共和国农业农村部(https://www.moa.gov.cn)最新数据显示(图1),我国植保无人飞机的保有数量和防治总面积从2014年开始上升,特别是从2017年起呈跳跃式上升。2021年,我国植保无人飞机保有量突破10万架,防治面积达6 861万hm2次,位居世界第一[3]。截至2022年底,我国植保无人飞机保有量达到15万架,防治面积达10 400万hm2次,接近我国总防治面积的四分之一左右,植保无人飞机的保有量和防治面积均居世界首位。

图1 2014—2022 年我国植保无人飞机历年保有量和防治面积
随着植保无人飞机产品性能的提升和施药技术的快速发展,植保无人飞机在我国快速发展并得到广泛应用。植保无人飞机作为一种作物病虫害防治的新型施药工具,与其作业相关的主要因素包括植保无人飞机产品性能、防治作物病虫害的有效性及对环境和非靶标生物和敏感作物的安全性。本文通过对国内外植保无人飞机相关专利和期刊文献的分析,系统、定量地分析国内外植保无人飞机在产品性能和技术特点、施药技术和风险评估方面的研究动态和热点,并在此基础上提出了植保无人飞机未来的研究方向,为植保无人飞机的研究和应用提供有力的支撑。
1 植保无人飞机产品性能和技术研究
植保无人飞机产品在我国的发展经历了从航模改造阶段和手动飞行到自主飞行、仿地飞行、主动避障和多机协同的阶段。2016年前,我国植保无人飞机多以手动操控为主,作业质量完全取决于飞手的操控水平,病虫害防治效果对飞手技术水平依靠度高,而且当时植保无人飞机飞手紧缺,限制了植保无人飞机防治病虫害的大面积应用。2016年以后,以安阳全丰、广州极飞和深圳大疆为代表的植保无人飞机生产企业积极研发新机型和无人飞机飞控系统;华南农业大学、农业农村部南京农机化研究所和中国农业大学等科研单位在植保无人飞机关键部件和系统方面做了大量研究工作,共同推动我国植保无人飞机向自动化和智能化方向发展。
植保无人飞机产品性能和技术研究主要包括飞行控制系统、传感器系统、路径规划和避障系统;电池和充电系统;数据处理和分析系统以及安全保障系统等。首先,飞行控制系统是植保无人飞机的核心,能够实现飞机的自动起飞、飞行、降落等操作。其次,传感器系统能够实现对农田的高精度测量、作物生长状态的监测、病虫害的识别等功能,为农业生产提供了非常重要的数据支持。路径规划和避障系统则能够根据农田的地形、作物的分布等信息,规划出最优的飞行路径,并且能够避免与障碍物相撞。电池和充电系统则能够提供足够的电力支持,使飞机能够长时间飞行,同时具备快速充电等功能。数据处理和分析系统能够实现对农田数据的采集、处理和分析,为农业生产提供科学依据和决策支持。最后,安全保障系统则能够确保飞机的安全飞行。
1.1 植保无人飞机人工智能划分体系
2013—2022年,全球申请的有关植保无人飞机专利共1 078项(图2)。从图2可以看出,植保无人飞机相关专利从2016年开始快速增长,在2017—2021年达到高峰期,2022年开始下降,这个趋势也正是植保无人飞机从手动向自动和智能化发展的黄金时期。
为了更好地理解植保无人飞机的智能划分体系,本文参考《三体智能革命》一书中提及的智能等级[4],结合中国工程院总结出的智能制造基本范式[5]以及一些关于智能定义与分级的不同观点[6],经过整合之后,得出了植保无人飞机的5级智能划分体系,并为每个级别分别命名,同时给出判断依据(表1)。按照表1中的划分依据,对检索到的1 078项植保无人飞机专利进行划分。在1 078项植保无人飞机专利中,智慧级的植保无人飞机仅占整体的0.46%(图3)。在所有智慧级植保无人飞机中,以农业农村部南京农业机械化研究所设计研发的“多源信息融合智能决策自主飞行植保无人飞机”的人工智能等级最高,处于智慧级植保无人飞机研发上的领先地位。目前市场上普遍推广的无人飞机如大疆(T40、T50和T25机型)、极飞(P80和P100机型)和全丰等大多处于智能级别。尽管目前市场上应用的植保无人飞机的人工智能程度已经很高,但是还有提升空间,需要相关研究机构和企业不断提高无人飞机的技术水平和应用能力,以满足市场需求。

表1 植保无人飞机5 级智能划分体系表

图3 植保无人飞机各人工智能等级占比分布图
1.2 基于数据库分析植保无人飞机产品性能和技术研究现状
为了更深入了解植保无人飞机产品性能和技术的研究现状,本文基于Web of Science Core Collection(WoSCC)科学引文索引扩展数据库和知网数据库,对2023年5月之前关于植保无人飞机产品性能和技术研究的文献检索进行分析和大数据挖掘。WoSCC是文献计量学分析中最常用的数据库之一,包括10 000多种高质量期刊和全面的引文记录。此外,WoSCC文档类型标签已被证明比其他数据库(如Scopus)更精确。在这部分研究中,我们对“植保无人飞机”“喷头”“平台”“系统”“方法”“算法”“配件”“飞控系统”“机翼”和“机架”等关键词进行高级检索,采用VOSviewer和文献计量在线分析平台(https://bibliometric.com/)等工具进行分析。
1.2.1 研究期刊分析
与植保无人飞机产品性能和技术相关的期刊网络可视化如图4所示。共有30种期刊发表了关于植保无人飞机产品性能和技术相关的原创文章。其中,《International Journal of Agricultural and Biological Engineering》中收录10篇,Computers and Electronics in Agriculture》中收录4篇和《Agriculture-Basel》中收录3篇,以上是收录相关文章最多的3种主要期刊。在前10名期刊中,《International Journal of Agricultural and Biological Engineering》所收录文章的总引用次数最高(23次),平均每篇文章每年被引用次数最高(2.3次),表明其极具影响力。

图4 与植保无人飞机产品性能和技术相关的期刊网络可视化图
1.2.2 研究国家分析
本文分析了来自15个国家或地区的研究人员,关于植保无人飞机产品性能研究相关的原创文章共有48篇。网络可视化图如图5(a)所示,该图显示了这48篇文章的不同国家或地区的作者间合作关系;弦图和协作网络图如图5(b)所示,该图直接显示了国家或地区之间的协作。从中可以看出,中国在植保无人飞机产品性能和技术这一研究领域与大多数国家或地区开展了合作,这也正是中国植保无人飞机虽然起步较晚,但是却后来者居上的原因。
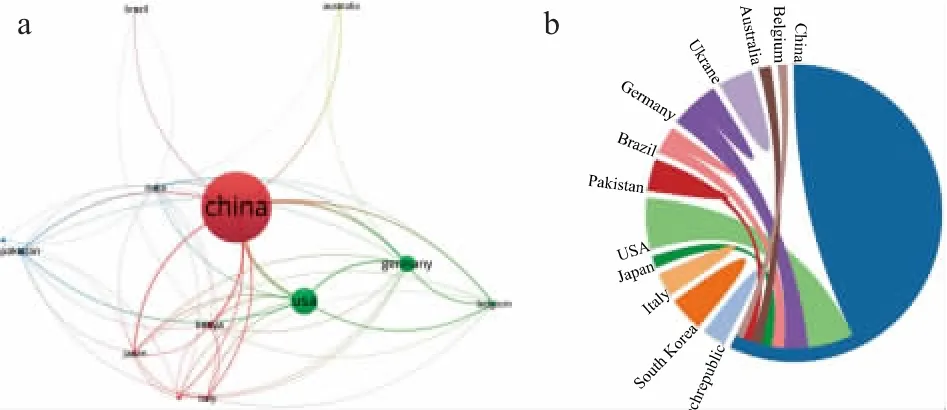
图5 与植保无人飞机产品性能和技术相关的国家网络可视化图(a)和国际合作网络图(b)
1.2.3 研究机构分析
本文对相关研究机构进行了协作网络可视化,发现大多数机构倾向于国内合作,而不是国际合作(图6)。68个机构共产出48篇论文,其中以中国农业大学为第一代表单位的文章最多(8篇),其次是华南农业大学(5篇)。然而值得关注的是,虽然中国农业大学的论文生产率高于华南农业大学,但是华南农业大学在植保无人飞机领域的论文总被引用次数、一作平均被引次数均高于中国农业大学。

图6 与植保无人飞机产品性能和技术相关的研究机构网络可视化图
1.2.4 研究作者分析
本文分别基于知网和WoSCC对植保无人飞机性能和技术相关论文的作者进行网络可视化分析(图7、图8)。在知网数据库中,来自华南农业大学的研究人员兰玉彬是植保无人飞机产品性能和技术相关领域发表文章最多的作者(13篇),其次为来自同一单位的研究人员漆海霞(9篇)。在WoSCC科学引文索引扩展数据库中,共有213名研究人员为48篇关于植保无人飞机性能和技术相关的原创文章作出了贡献。其中,华南农业大学兰玉彬是植保无人飞机产品性能和技术相关领域发表文章最多的作者(6篇),来自中国农业大学的研究人员何雄奎是植保无人飞机产品性能和技术相关领域被引次数最多的作者(被引17次)。对相关作者的国际交流合作情况进行分析发现,中国的研究人员除了和本国的科研人员交流之外,与其他的国家的研究人员也保持着深度的交流合作。

图7 与植保无人飞机产品性能和技术相关的作者网络可视化图(知网数据库)

图8 与植保无人飞机产品性能和技术相关的作者网络可视化图(WoSCC 数据库)
1.2.5 关键词分析
基于在知网数据库以及WoSCC科学引文索引扩展数据库中的关键词,本文对植保无人飞机产品性能和技术相关的热点关键词进行了多维度检索和分析。如图9和10所示,在知网数据库中,排在前列的关键词包括“植保无人飞机”(22篇)、“植物保护”“植保”(9篇)、“障碍物检测”(4篇)、“飞控系统”(5篇)、“传感器”(3篇)、“服务平台”(5篇)和“人工智能”(2篇)。在WoSCC科学引文索引扩展数据库中,排在前列的关键词包括“unmanned aerial vehicle”(17篇)、“design”(6篇)、“model”(4篇)和“system”(5篇)。
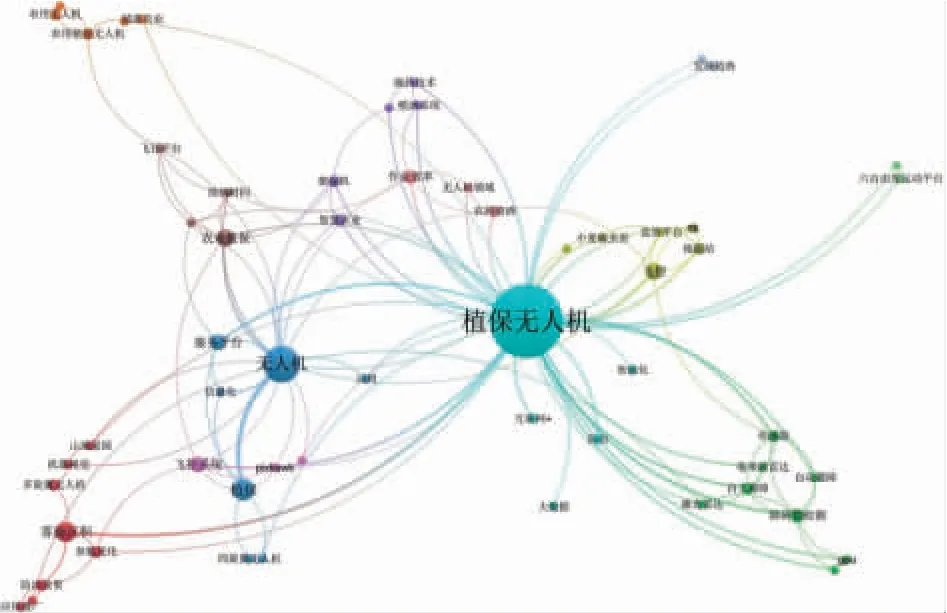
图9 与植保无人飞机产品性能和技术相关的关键词网络可视化图(知网数据库)
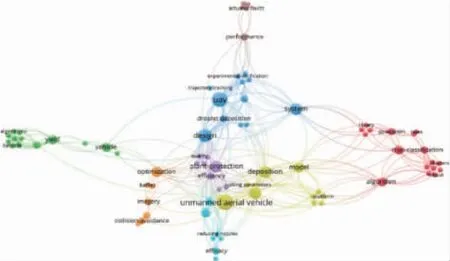
图10 与植保无人飞机产品性能和技术相关的关键词网络可视化图(WoSCC 数据库)
2 植保无人飞机施药技术研究
植保无人飞机施药技术研究主要包括飞行轨迹规划技术[7]、喷雾系统技术[8]、传感器技术[9]、控制系统技术[10]、安全保障技术[11]、数据处理和分析技术[12]以及智能化技术[13]等方面。飞行轨迹规划技术是植保无人飞机施药技术的核心,它能够根据农田作物的分布情况、风向、风速和地形等因素,确定最优的飞行轨迹,实现精准施药。喷雾系统技术则能够实现高效、均匀、精准的喷雾效果,为植保施药提供了重要支持。传感器技术能够实现对农田的高精度测量、作物生长状态的监测、病虫害的识别等功能,为施药提供科学依据。控制系统技术能够实现对飞机的自动控制,实现精准施药。安全保障技术则能够确保施药的安全性和有效性。数据处理和分析技术能够实现对施药数据的采集、处理和分析,为精准施药提供科学依据和决策支持。智能化技术则能够实现对作物的智能分析和识别,为精准施药提供更加科学的依据。
除此之外,在田间应用过程中,大量科研协作研究与田间试验结果证明植保无人飞机对农作物病虫害有较好的防效。袁会珠等[1]指出,对于重要农作物病虫害如稻纵卷叶螟、水稻纹枯病、小麦蚜虫、玉米黏虫等防治效果均在80%以上。近年来,植保无人飞机除了广泛应用于小麦[14]、玉米[15]、水稻[16]和棉花[17]等大田作物外,逐步向经济作物[18]、果树[19]等扩展应用。在应用过程中,为了提高防治效果和农药利用率,国内外研究者围绕着影响雾滴沉积因素——无人飞机自身特性、作业参数、药剂配方、环境因素展开研究。研究表明,雾滴粒径[20]、下洗气流[21]、作业参数[22]、环境风速[23]、作物形态[24]和喷雾助剂[25]等因素均会影响植保无人飞机施药沉积分布特征,从而引起防治效果的变化。
因此,为了更好地了解植保无人飞机施药技术的发展状况,本文针对“植保无人飞机”“病虫害”“农药”“助剂”和“防治”等关键词进行高级检索,采用VOSviewer 和文献计量在线分析平台(https://bibliometric.com/)等工具进行分析。
2.1 研究期刊分析
与植保无人飞机施药技术相关的期刊网络可视化,如图11所示。共有30种期刊发表了关于植保无人飞机施药技术相关的原创文章。其中,《International Journal of Agricultural and Biological Engineering》收录22篇,《Computers and Electronics in Agriculture》收录11篇,《Crop Protection》中收录8篇,以上是收录相关文章最多的3种主要期刊。在前10名期刊中,《Precision Agriculture》所收录文章的平均被引次数最高(6.25次)。

图11 与植保无人飞机施药技术相关的期刊网络可视化图
2.2 研究国家分析
本文分析了来自22个国家或地区的研究人员,关于植保无人飞机施药技术研究相关的原创文章共有117篇。网络可视化图如图12(a)所示,该图显示了这117篇文章的不同国家或地区的作者间合作关系;弦图和协作网络图如图12(b)所示,该图直接显示了国家或地区之间的协作,从中可以看出,中国在植保无人飞机施药技术研究方面是国际合作最多的国家。

图12 与植保无人飞机施药技术相关的国家网络可视化图(a)和国际合作网络图(b)
2.3 研究机构分析
本文对相关研究机构进行了分析。如协作网络可视化图13所示,117篇论文的作者来自164个机构。其中,以华南农业大学为代表机构的文章最多(26篇),其次是中国农业大学(22篇),第三是国家国际合作研究中心农业航空害虫研究中心(22篇)。

图13 与植保无人飞机施药技术相关的研究机构网络可视化图
2.4 研究作者分析
本文分别对知网和WoSCC中所检索的植保无人飞机施药技术相关论文的作者进行网络可视化分析。在知网数据库中,中国农业科学院植物保护研究所研究人员闫晓静在影响力前十的作者中排名第一。其无论在总被引用次数、平均被引次数、一作被引次数和一作平均被引数均处于领先(图14),在WoSCC科学引文索引扩展数据库中,中国农业科学院植物保护研究所研究人员袁会珠在技术研究和应用推广方面作出了卓越的贡献(图15)。

图14 与植保无人飞机施药技术相关的作者网络可视化图(知网数据库)

图15 与植保无人飞机施药技术相关的作者网络可视化图(WoSCC 数据库)
2.5 关键词分析
基于知网数据库以及WoSCC科学引文索引扩展数据库中的关键词,本文对植保无人飞机施药技术相关的热点关键词进行了多维度检索和分析(图16、图17)。在知网数据库中,排在前列的关键词包括“植保无人飞机”(163篇)、“病虫害防治”(42篇)、“防治效果”(22篇)、“病虫害”(19篇)、“防治”(17篇)、“统防统治”(12篇)、“雾滴沉积”(9篇)和“助剂”(7篇)。在WoSCC科学引文索引扩展数据库中,排在前列的关键词包括“deposition”(23 篇)、“pesticide application”(12 篇)、“droplet deposition”(13篇)和“parameters”(10篇)。

图16 与植保无人飞机施药技术相关的关键词网络可视化图(知网数据库)

图17 与植保无人飞机施药技术相关的关键词网络可视化图(WoSCC 数据库)
3 植保无人飞机风险评估研究
目前植保无人飞机的研究主要集中于对病虫害的防治效果和喷雾雾滴的沉积与飘移分布情况等方面,同时围绕农药(药剂剂型、助剂等)、环境(风速、温度、湿度等)和植保无人飞机(机械自身特点、作业参数设置等)三大环节,建立起三大环节的联系以期实现提高农药利用率的目标,但针对植保无人飞机施药健康风险、膳食风险和环境风险评估方面的研究较少。
在现有研究中,关于植保无人飞机施药健康风险研究结果初步表明,植保无人飞机施药对操作者的暴露量显著低于背负式喷雾[26-27],但研究结果仅评估了单一途径的暴露风险,未综合考虑3种暴露途径(施药前配药暴露、施药时农药在空气中飘移暴露和施药后机身暴露)的累积暴露风险[3]。关于植保无人飞机施药膳食风险研究初步表明,地面施药方式产生的残留水平与航空施药方式(有人驾驶飞机)相当或比其更高[28]。关于植保无人飞机环境风险评估研究初步证明,植保无人飞机施药可能会对周围环境存在较大的风险。目前国内外对非靶标生物的风险评估的研究仅有一篇关于植保无人飞机喷雾飘移对蜜蜂风险评估的文章[29]。因此,今后还需加强植保无人飞机施药风险研究,为完善现有健康风险评估模型或构建植保无人飞机施药风险评估模型提供数据基础。
为深入把握植保无人飞机风险评估研究的发展现状,本文对“植保无人飞机”“飘移”“风险”“控制”和“暴露”等关键词进行高级检索,之后同样采用VOSviewer 和文献计量在线分析平台(https://bibliometric.com/)等工具进行分析。
3.1 研究国家分析
本文分析了来自9个国家或地区的研究人员,关于植保无人飞机施药技术研究相关的原创文章共有55篇。网络可视化图如图18(a)所示,该图显示了这55篇文章的不同国家或地区的作者间合作关系;弦图和协作网络图如图18(b)所示,该图显示了国家或地区之间的协作。从中可以看出,植保无人飞机风险评估研究领域的国家总数,相比于试验技术研究和植保无人飞机产品性能和技术研究明显减少,这表明有些国家还处在植保无人飞机的发展阶段,还没有意识到植保无人飞机施药风险研究的重要性。

图18 与植保无人飞机风险评估相关的国家网络可视化(a)和国际合作网络图(b)
3.2 研究作者分析
本文分别对基于知网和WoSCC的植保无人飞机性能和技术相关论文的作者进行网络可视化分析(图19、图20)。根据知网数据库分析显示,在植保无人飞机风险评估领域主要以华南农业大学兰玉彬团队(20篇)和中国农业科学院植物保护研究所袁会珠团队(13篇)为主。根据WoSCC科学引文索引扩展数据库显示,在无人飞机风险评估领域依旧主要以华南农业大学兰玉彬团队(7篇)和中国农业科学院植物保护研究所袁会珠团队(4篇)为主。

图19 与植保无人飞机风险评估相关的作者网络可视化图(知网数据库)

图20 与植保无人飞机风险评估相关的作者网络可视化图(WoSCC 数据库)
3.3 关键词分析
基于知网数据库以及WoSCC科学引文索引扩展数据库,本文对植保无人飞机风险评估相关的热点关键词进行了多维度检索和分析(图21、图22)。在知网数据库中,排在前列的关键词包括“植保无人飞机”(29篇)、“雾滴飘移”(10篇)、“飘移”(6篇)、“雾滴粒径”(4篇)、“喷雾”(3篇)、“助剂”(3篇)、“数值模拟”(3篇)和“飘移潜在指数”(2篇)等。在WoSCC科学引文索引扩展数据库中,排在前列的关键词包括“drift”(22篇)、“deposition”(19篇)、“model”(13篇)、“parameters”(11篇)和“numerical-simulation”(8篇)等。

图21 与植保无人飞机风险评估相关的关键词网络可视化图(知网数据库)

图22 与植保无人飞机风险评估相关的关键词网络可视化图(WoSCC 数据库)
4 植保无人飞机研究方向与趋势
基于上述对植保无人飞机人工智能程度的分类和总结,以及对植保无人飞机产品性能和技术、施药技术和风险评估等研究的文献计量学检索和分析,本文对植保无人飞机的研究方向和趋势主要从以下3个方面进行总结展望。
4.1 植保无人飞机产品性能和技术展望
植保无人飞机产品性能和技术是未来的研究重点。随着社会经济的快速发展,人们对食品品质和安全的要求越来越高。因此,植保无人飞机需要具备更高的精度、更强的适应性和可靠性。未来的研究方向应该关注无人飞机的导航、控制、通信和传感器技术,以提高其自主性和智能化程度。
4.2 植保无人飞机施药技术展望
随着农业生产的不断发展,农药的使用量也在逐年增加,这对环境和人类健康造成了严重的影响。植保无人飞机的施药技术可以实现精准施药,减少农药的使用量,降低对环境和人类的危害。未来的研究方向应该着重关注提高植保无人飞机的防治效果,创新和改进病虫害防治技术,以及将“统防统治”的理念应用到植保无人飞机施药技术中。
4.3 植保无人飞机风险评估展望
在植保无人飞机的施药过程中,施药带来的风险直接关乎环境和人类安全性问题,是植保无人飞机发展的“卡脖子”难题。因此,未来的植保无人飞机风险评估应该关注以下几个方面:
(1)关注雾滴飘移和飘移潜在指数分析。通过对植保无人飞机施药过程中的雾滴飘移情况进行分析,可以评估其对周围环境和人类的潜在影响。同时,通过计算飘移潜在指数,可以预测植保无人飞机施药过程中的雾滴飘移范围,为风险评估提供更加科学的依据。
(2)关注“助剂”对飘移的影响。助剂的使用对喷雾雾滴分布情况有重要的影响,由于植保无人飞机飞行高度高,作业速度快,喷雾雾滴细,药液浓度高等特点,极易受到气象条件特别是风的影响,带来较高的飘移风险。因此,未来的研究方向应该关注飞防助剂的选择与科学使用,以期提高植保无人飞机喷雾雾滴在靶标区的沉积分布并减少其在非靶标区的沉积分布,最终达到提高防治效果和减少对非靶标生物的风险。
(3)关注数值模拟和模型构建技术在飘移风险评估中的应用。数值模拟技术可以模拟植保无人飞机施药过程中的雾滴飘移情况,为飘移风险评估提供更加准确的预测和分析。
综上所述,植保无人飞机作为一种高效、精准、环保的农业生产工具,未来的研究方向应该关注产品性能和技术研究、施药技术和施药风险评估深层研究,在此基础上应将三方面紧密结合起来,推动植保无人飞机向更安全、更精准、更绿色化的方向前进,不断提高植保无人飞机的施药技术水平和施药安全性,更好地服务于现代农业生产,实现农业生产的可持续发展。
猜你喜欢
世界科学技术-中医药现代化(2022年3期)2022-08-22
广西植保(2021年4期)2022-01-06
云南化工(2021年8期)2021-12-21
今日农业(2021年17期)2021-11-26
海洋信息技术与应用(2020年1期)2020-06-11
传媒评论(2019年4期)2019-07-13
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
新农业(2017年2期)2017-11-06
岷峨诗稿(2017年4期)2017-04-20
