
船舶动力推进系统加速性能优化策略
2023-06-13 09:12:26刘世伟
舰船科学技术 2023年9期
刘世伟
(武汉交通职业学院 船舶与航运学院,湖北 武汉 430000)
0 引 言
作为船舶重要的动力装置,船舶动力推进系统不仅直接影响船舶的速度、操纵性、燃油效率等性能指标,而且也对船舶的安全性、环保性等具有重要影响。船舶动力推进系统需要满足推进效率、燃油消耗率、加速可靠性的需求[1–3]。为使船舶航行满足排放要求和经济效益需求,研究船舶动力推进系统,优化船舶动力推进系统的加速性能,提升船舶在不同工况下的航行可靠性[4]。
目前,已有相关学者针对船舶动力推进系统的优化问题展开研究。郝立颖等[5]建立了船舶推进器的故障模型,充分考虑船舶推进器失效、卡死和中断的故障情况,将自适应滑模控制器应用于船舶动力推进系统中,保证船舶行驶受到外界扰动以及发生故障时,具有较高的信号一致性,从而实现船舶动力推进系统的控制。高泽宇等[6]将自适应阈值方法应用于船舶动力系统中,结合回归支持向量机方法与模拟退火算法构建动力系统的常规状态模型,结合滑动时间窗口和自适应阈值优化动力推进系统的加速性能。以上方法虽然有效提升船舶动力推进系统的运行性能,但是未充分考虑海洋工作环境不可预测性以及复杂性,影响复杂环境下船舶的运行性能。
为提升船舶动力推进系统的加速灵活性,提出一种加速性能优化策略。通过该方法提升船舶的航行动力,以适应复杂多变工况下的行驶环境。
1 动力推进系统加速性能优化
1.1 船舶动力推进系统组成分析
通过船舶动力推进系统,将船舶动力主机与动力副机形成的功,再通过推进器转换为航行推力[7]。本文以装备了8台推进器的船舶动力推进系统为例展开研究。
1)可调螺距螺旋桨又称为调距桨,利用调距桨调节船舶桨叶和桨毂,在船舶推进电机转速固定情况下,通过调节调距桨螺距的大小,使得船舶推力与航行速度发生变化,满足船舶前进与后退的航行工况。船舶动力推进系统的调距桨设置于船尾,调距桨作为船舶动力推进系统的主推进器,为船舶移动提供动力。调距桨可以满足不同航行工况下的混合动力船舶航行需求,充分吸收船舶动力推进系统的功率,具有较高的动力利用率,可以延长船舶动力推进系统的使用寿命[8]。调距桨无需调节船舶主机转速,仅通过调节螺旋桨参数,即可实现船舶在不同工况下的航行功能调节,通过螺旋桨提升船舶的操作性能。
2)船舶的横向推力利用侧推进器产生。可调距螺旋桨侧推和喷水推进侧推是为船舶提供侧推力的主要方式。调距桨侧推通过调节桨叶螺距,调节船舶推力大小。侧推进器具有操作简单的优势,对于具有较高灵活性与操纵性需求的船舶,在复杂工况下仍然可以利用侧推进器提升船舶的航行与作业能力。
3)全回转推进器可以围绕船舶立轴的轴线全方位旋转,为船舶提供不同的航行功能。利用全回转推进器,满足船舶高操作性能需求,为船舶动力定位的精准执行提供保障。吊舱推进器和Z型传动全回转推进器,是船舶动力推进装置常用的全回转推进器,二者具有相似的水动力性能。
1.2 船舶动力推进系统数字模型
船舶动力推进系统不受外界干扰力和外界干扰力矩的影响,其中的全回转推进器,为船舶从不同方向形成最大的推力。利用侧推进器为船舶提供横向推力,提升船舶的操作性能。
全回转推进器与普通的螺旋桨相同,水阻力矩和推力是全回转推进器的主要性能参数。利用功率构建全回转推进器的数学模型,全回转推进器的功率计算公式如下:
式中:n与KQ分别为推进器数量以及扭矩系数,D与ρ分别为螺旋桨的桨毂直径以及海水密度,Q与KT分别为全回转推进器水阻力矩以及推力系数,Tx与Ty分别为推进器的横向与纵向推力。
侧推进器通常安装在船首或船尾的横向导管内。船舶螺旋桨转动时,带动流体从导管流入或流出,流体流入与流出的压力差,形成与导管平行的推力,船舶导管的流量与形成的侧推力相关,导管流量越大时,船舶受到的侧推力越大。
通过分析侧推进器的来流与喷流,计算船舶的侧推力和力矩的表达式如下:
式中:Z为船体底部的浸湿面积,nx与ny分别为船体向外的单位法向量在船舶横向与纵向的分量,F与M分别为侧推进器的喷流与船体干涉力在纵向的分力与力矩。
利用螺旋桨推力公式构建船舶动力推进系统的推进器模型。在船舶航行的过程中,推进器在产生推力的同时,形成令船舶转动的扭矩。推进器的安装位置,与扭矩的计算和推力大小存在直接关联。船舶扭矩总和计算公式为:
式中:xi,yi分别为船舶动力推进系统各推进器的位置坐标;Xi,Yi分别为横向推力与纵向推力。利用以上过程构建船舶动力推进系统的数字模型,为船舶动力推进系统加速性能优化提供基础。
1.3 加速性能优化策略
1.3.1 船舶动力推进系统加速策略
依据上述所构建的船舶动力推进系统的数学模型,为船舶动力推进系统制定加速策略。利用调速器设置固定的主机转速,在动力设备的单位步长内,提升动力设备的速率。设置船舶动力推进系统加速过程如下:
闭合船舶动力主机离合器,为动力主机设置固定的接排转速。动力推进系统稳定后,调节转速以恒定的增加率提升主机转速,利用传动系统将主机形成的转速和扭矩传送至定距桨,推进船舶加速。
采用气体机转速控制方法,对船舶动力推进系统设置恒定升速率。将功率/扭矩控制方法应用于船舶轴带电机中。船舶动力推进系统采用恒升速率加速时,船舶船桨模型的轴功率输出实时结果,船舶动力推进系统设置不同的转速增加率。为了保障船舶动力推进系统加速过程中保持较高的稳定性。设定船舶动力推进系统加速限制的表达式如下:
式中:P1与P2分别为动力电机的轴系功率以及额定功率,P′为动力主机的最大持续功率。通过式(5)确定船舶动力系统的加速限制值,控制船舶动力推进系统加速。
1.3.2 船舶动力推进系统加速性能优化策略
利用变频器超前控制方法,优化船舶动力推进系统加速响应的实时性。将船舶动力推进系统的变频率,与轴系转速的高采信号作为船舶动力推进系统加速性能优化的输入,计算船舶动力电机的输出功率。采用轴带电机扭矩控制方法控制船舶电机扭矩,船舶动力推进系统利用变频器采集船舶车钟手柄的最终位置,手柄的位置信号与船舶动力推进系统加速的目标转速对应,结合稳态负荷分配结果,确定船舶加速目标对应的船舶电机参数。为了保证加速稳定性,设定船舶电机每个循环转速下,扭矩增加限制为50 N·m。通过以上过程,完成船舶动力推进系统加速性能优化。
2 结构与分析
为了验证船舶动力推进系统加速性能优化策略的有效性,进行仿真实验。
实验选取某舱容为8 000 m3的货船作为研究对象。所选取船舶的设计航速为14.5 kn,选取2台1 800 kW的气体推进主机作为船舶动力推进系统的动力主机。利用Matlab软件,模拟不同工况下船舶航行状况,验证所研究方法有效性。
船舶与船舶螺旋桨的参数设置如表1所示。
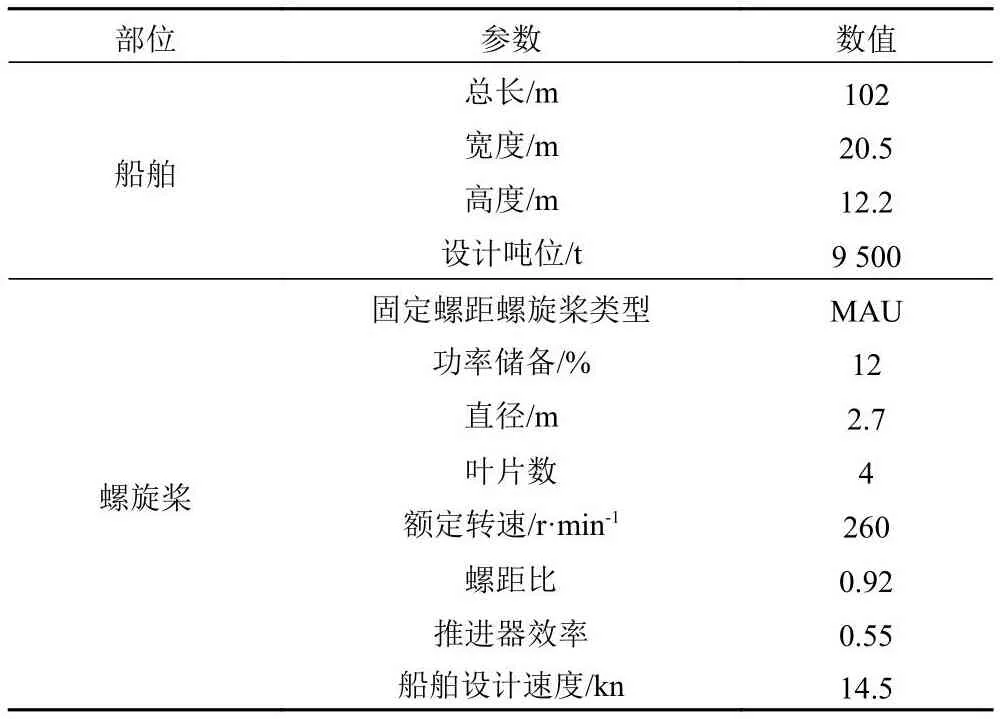
表1 船舶与螺旋桨参数设置Tab.1 Ship and propeller parameter Settings
设置船舶以低速工况、服务航速工况等不同工况航行,在船舶航行30 s时,对船舶发出加速指令。采用本文方法优化船舶动力推进系统的加速性能,船舶加速的仿真结果如图1所示。

图1 船舶加速仿真结果Fig.1 Ship acceleration simulation results
可以看出,本文方法采用变频器超前控制方法,对船舶加速性能进行优化,船舶的发动机转速和主机功率较为平稳,动力推进系统的加速性能优越。加速过程中发动机转速的跟随性较高,可以快速达到加速目标,具有较高的加速稳定性。不同工况下,船舶航行的加速性能良好,有助于提升船舶航行的实际应用性。
统计采用本文方法对船舶的加速性能,船舶速度变化结果如图2所示。
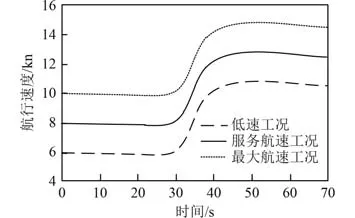
图2 船舶加速结果Fig.2 Ship acceleration results
可以看出,采用本文方法在不同工况模式对船舶进行加速性能优化,船舶的加速性能良好,可以保持稳定的速度变化。船舶动力推进系统接收加速信号后,快速调节船舶速度,保障船舶在较短的时间内满足加速目标需求。上述结果表明,本文方法具有较高的船舶动力推进系统加速优化性能,可以为船舶的稳定航行提供良好的基础。
采用本文方法优化船舶动力推进系统的加速性能,船舶航行的燃油消耗率变化如图3所示。

图3 船舶燃油消耗率Fig.3 Fuel consumption rate of ships
可以看出,采用本文方法优化船舶加速性能后,相比于未采用本文方法的情况,船舶的燃油消耗率明显下降,验证本文方法可以提升船舶运营的经济性。实验结果表明,本文方法可以通过对船舶速度的控制,提升船舶航行的可靠性,降低船舶的燃油消耗率,实现船舶速度控制的稳定性。
3 结 语
针对船舶动力推进系统的加速性能,本文进行优化设计,提升不同工况下船舶航行的加速性能。通过实验验证,通过对船舶动力推进系统加速性能优化,船舶加速稳定性高,船舶航行的燃油消耗率下降幅度明显,可以实现船舶加速性能的优化。该方法具有较高的优化船舶航行加速性能的优势,适用于不同工况下,船舶航行的实际应用中。
本文的研究旨在探究如何优化船舶动力推进系统的加速性能,通过改善船舶动力加速的效率,进一步提高船舶的性能和经济效益,同时减少船舶运行中相互之间的碰撞风险,降低海洋污染,实现可持续发展。
猜你喜欢
疯狂英语·新读写(2021年6期)2021-08-05 07:49:10
舰船科学技术(2021年12期)2021-03-29 01:28:38
航空发动机(2020年3期)2020-07-24 09:03:16
当代陕西(2018年12期)2018-08-04 05:49:08
中学生英语(2017年6期)2017-07-31 21:28:55
青年歌声(2017年6期)2017-03-13 00:57:56
学习月刊(2015年10期)2015-07-09 03:35:12
广东造船(2015年6期)2015-02-27 10:52:46
中国舰船研究(2014年1期)2014-05-14 06:40:47
中国船检(2013年10期)2013-08-15 00:42:40
