
船舶航向内模控制方法
2023-06-13 09:12:20马晨翔车志宣陈卫杰吴爱平
舰船科学技术 2023年9期
马晨翔,耿 涛,车志宣,陈卫杰,吴爱平
(1.长江大学 电子信息学院,湖北 荆州 434022;2.东莞小豚智能技术有限公司,广东 东莞 523830)
0 引 言
随着无人驾驶技术、计算机技术等先进技术的发展,无人船已成为未来船舶发展的一个重要分支。因为其较强的灵活性与较高的可扩展性,无人船无论是在军用还是在民用领域都有着广泛的应用。随着无人船的快速发展,航向的控制问题得到了重点关注。目前传统的航向控制方法主要为PID控制、模糊PID控制[1],张晨等[2 – 4]基于不同类型的滑模控制设计无人船航向控制器,并通过仿真证明控制器的优越性。但上述这些方法多数较为复杂,调参困难,对计算资源要求较高,难以在工程应用中实现。
Tzeng等[5 – 6]提出利用一阶 Nomoto 模型和内模控制思想设计船舶首向控制器。杨吉[7]基于内模控制设计航向控制器,并实船验证航向内模控制器的可行性。但传统内模控制器在系统稳定后存在静态误差。近年来,国内外专家提出二自由度控制方式[8],许多学者根据不同的对象或控制方式设计了二自由度内模控制器,具有较好的跟踪性能和抗负载干扰特性[9 – 10]。本文以二自由度内模控制器原理为基础,结合线性Nomoto船舶模型,提出一种改进的二自由度内模航向控制器。消除了静态误差,通过建模仿真,证明该控制器具有良好的控制效果。
1 船舶模型建模
目前对于无人船数学模型的描述,由于水动力模型建模复杂,而响应型模型需要考虑的因素较少,反映了无人船航向角随时间的变化规律,所以在工程上响应型模型应用广泛。响应型模型可以直观地显示模型输入输出关系,非常适合无人船航向控制器的设计,可通过实验获得输入输出数据辨识参数。
线性Nomoto模型已具有较高的精度,将船舶的纵向运动从三自由度操纵运动方程中解耦,忽略掉纵向运动,得到仅考虑船舶的2个自由度横漂速度v和转艏角速度r,船舶动力学的方程如下:
为得到无人船转首角速度与舵角之间的关系,将式(1)中的横向速度v消掉即可得到一个描述操纵舵角对首摇的二阶线性响应模型,即
式中:K及T1,T2,T3为无人船的操纵性指数,其中T=T1+T2−T3,T称为跟随指数。为得到无人船转首角速度r与舵角δ的关系,对式(2)进行拉普拉斯变换,并且考虑到航向角ψ与转向角速度r之间的关系:
采用野本谦作[11]提供的线性模型,可得航向角ψ与舵机指令δ对应的传递函数模型为:
式(4)为船舶操纵运动方程,也称Nomoto模型。本文采用Thor I.Fossen书中货船的航向模型参数,K=0.185,T1=118,T2=7.8,T3=18.5,可得本文无人船航向控制模型为:
考虑实际工程中的应用,需要在离散系统中实现,对船舶模型进行离散化可得:
其中:
2 航向内模控制结构设计
2.1 传统内模控制结构的原理
内模控制(IMC)是一种采用被控对象的内部模型和反馈修正的预测控制,作为Smith预估控制的扩展,因为其控制系统设计简单、可调参数少,且性能良好,使得参数整定较为简单,方便工业现场的调试。传统的内模控制器结构如图1所示。

图1 传统内模控制器结构图Fig.1 Structure diagram of traditional internal model controller
图中,Gc为内模控制器,G为被控对象,即为无人船,Ghat为被控模型,即为无人船航向模型,r为设定值,即期望航向值,d为系统输出扰动,y为内模系统的输出,即实际输出航向值。
根据内模结构原理可得出系统对应的传递函数为:
当实际被控无人船与所建立的船舶模型达到匹配时,即G(s)=Ghat(s)时,上式可简化为:
航向输出值与航向期望值之间的差值为:
内模控制器Gc的设计方法有很多,本文内模控制器基于零极点相消法设计。由式(9)、式(10)可知,当无人船模型建立准确时,若令Gc(s)=G−1(s)时,在理想的情况下,系统实际航向输出等于输入的期望航向。
由于期望航向输入一般为阶跃信号,需要对输入的期望航向进行柔化,为了物理可实现引入低通滤波器结构F(s),并且提高闭环控制系统的鲁棒性,内模控制器设计表达式为:
式中,Ghat−(s)为无人船航向模型最小相位部分。其中低通滤波器F(s)表达式为:
式中:n为滤波器的阶次,一般n的选择要保证内模控制器的正则性。由图1可以看出,传统内模控制方法可调节参数非常少,只有一个滤波器参数τ可调节,且τ的选取对系统的跟踪性能和鲁棒性起着决定作用,有明确的调整方向。当τ的取值越小时,对于输入航向的跟踪更快,会导致鲁棒性变差,故τ的取值需要结合仿真以及实际现场测试情况,平衡二者需求。一般对于连续系统取值大于0,对于离散系统的取值一般在0~1之间。
式(4)为内模控制系统中被控对象数学模型Ghat,由于K和T均大于0,所以可知无人船具有航向稳定性,则式(4)是一个最小相位部分,将式(4)代入式(11)可得控制器Gc(s):
对IMC控制器Gc进行离散化,由式(13)可得:
对滤波器F(s)进行离散化可得,由式(12)可得:
使用反向差分整理可得低通滤波器离散形式为:
其中:
将式(6)和式(16)代入式(14)可得离散形式Gc:
2.2 改进的二自由度内模控制结构设计
传统的一自由度内模控制或是二自由度内模控制方法,无论无人船模型建立是否准确,在扰动传递函数中,都存在不稳定的极点s=0,如果想要应用作为控制器,需要设法消除扰动传递函数中的纯积分项s,否则无法直接应用作为航向控制器,将会存在稳态误差。
在无人船实际工程应用中,在安装船舵时,由于机械误差或是人工安装误差,使得船舵存在一定程度的偏差,这样的偏舵作为负载干扰,使得传统的内模控制方法即使在系统达到稳定后,总存在一定的静态误差,造成无人船航向存在一定的偏差。这一点在仿真中也证实存在。本文介绍一种改进的二自由度内模控制结构,通过零极点对消的方法,使得控制器稳定,从而消除静态误差与镇定控制对象。改进的二自由度内模控制结构,如图2所示。

图2 改进的二自由度内模控制结构图Fig.2 Improved two degrees of freedom internal model control structure diagram
该结构改进之处在于它是在传统内模控制的基础上增加一个预稳定控制器Gm,用于调节无人船被控对象输出和无人船模型输出之差。通过控制器Gm消除扰动传递函数中的不稳定极点,消除负载偏舵的影响,保证系统稳态无差。
该结构另一个优点在于将输入的期望航向值响应和负载干扰响应实现解耦控制,使控制器的设计如传统内模控制方法设计一样简便,且控制器内的参数有各自的意义,控制器Gc调节系统的跟踪能力,控制器Gm调节系统的抗负载扰动能力,从而使控制系统的这2个性能能够各自达到最佳的状态。当控制器Gm=0时,此种结构与传统内模控制结构完全一样。
由图2可得系统的输出y的传递函数为:
当无人船模型建立准确时,即G(s)=Ghat(s)时,上式传递函数可简化为:
上式中输入干扰d(s)的输出传递函数Tyd由两部分组成,前一部分为:
可以看出其是一个闭环系统,通过调节控制器Gm(s)就可以整定被控无人船,后面一部分1−Gc(s)Ghat(s)作用是消除由于偏舵负载干扰引起的静差,从而保证航向控制系统稳定误差。
由式(19)可以看出,Gc和Gm两个控制器相互独立,一同决定航向输出,故在设计时可以分开设计,互不干扰。其中控制器Gc的设计可以按照传统内模控制器原理进行,预稳定控制器Gm的设计方法如下:
设预稳定控制器G为:
式中:Kc为控制器增益;T为无人船模型中跟随指数;β为滤波器参数,其计算公式为:
式中:Am为幅值裕度,K为无人船回转参数,θ为被控系统的时滞常数。为使系统稳定,通过幅值相角裕度理论确定该控制器参数,应使相角裕度ϕm>0◦,幅值裕度Am>1。这样使得系统稳定,具有一定的稳定裕量[12]。为了获得较满意的过渡过程,通常要求幅值裕量2~5,相角裕量为30◦∼60◦,本文选取Am=3,ϕm=60◦,其中Kc的取值范围如下:
对于无人船,舵机的时滞常数θ的值比较小,不会对控制系统产生影响,故可以忽略,且由式(23)可知,当Kc取越大时,β取值越小。
改进的二自由度内模控制方法总共有3个可调参数,但Gm控制器中Kc,β的取值与船舶模型K和T有关,只有Gc控制器中的τ需要调节。
为在离散系统中实现,将式(22)进行离散化:
其中:
3 仿真及分析
无人船航向作为被控对象,使用改进的二自由度内模控制器对航向进行控制,通过Matlab/Simulink仿真平台,针对式(5)船舶航向模型,期望值分别在30◦与60◦时航向控制性能仿真,其中K=0.185,T=107.3,τ=0.12,β=0.001,Kc=2.82。
为模拟实际工程中由于船舵的安装误差及设备误差导致的偏舵问题,在Matlab/Simulink仿真软件中,对船舶机理模型对象中加入偏舵干扰,一般取0.02~0.05 rad/s之间较为符合实际工程中的情况。仿真中偏舵取0.02 rad/s,结构如图3所示。
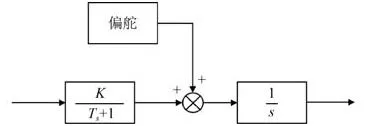
图3 偏舵干扰模型结构Fig.3 Rudder interference model structure
开展不同航向值以及偏舵干扰影响下的航向控制仿真。仿真实验结果如图4~图6所示。图4~图6中加入偏舵的仿真结果总结于表1。

表1 各航向控制算法仿真结果对比Tab.1 Comparison of simulation results of each heading control algorithm

图4 30°时航向控制算法对应的航向角变化Fig.4 Change of heading angle corresponding to heading control algorithm at 30°

图5 45°时航向控制算法对应的航向角变化Fig.5 Change of heading angle corresponding to heading control algorithm at 45°

图6 60°时航向控制算法对应的航向角变化Fig.6 Change of heading angle corresponding to heading control algorithm at 60°
由数据分析可以看出,传统内模控制器和PID控制器,2种控制方法均存在不同程度的静态误差,传统内模控制方法静差最大,而本文方法则消除了静态误差。传统PID控制器在偏舵干扰下,超调量显著增加,而改进的二自由度内模控制方法与传统内模控制方法均无超调。相较于另外2种控制器,本文提出的方法具有更短的稳定时间,并且该控制器控制性能不会因为初始航向角的不同而产生较大的偏差,说明该系统具有良好的控制性能和鲁棒性。
4 结 语
本文针对无人船航向控制Nomoto线性系统,设计一种改进二自由度内模航向控制器,实现单独设计和调节跟踪性能和抗负载扰动性能,相比传统航向控制方法相比可调参数少,仅有一个可调参数,且整定简单。当无人船模型参数确定后,整套控制系统即确定,为实现自适应控制提供控制方法。通过Matlab/Simulink将该控制器与传统内模控制器、PID控制器相比,改进的二自由度内模控制器消除了静态误差,对于航向的控制没有超调量,同时拥有更短的稳定时间。
猜你喜欢
新世纪智能(高一语文)(2021年3期)2021-07-16 08:30:16
民用飞机设计与研究(2019年4期)2019-05-21 07:21:26
小哥白尼(军事科学)(2019年2期)2019-04-17 02:17:28
小哥白尼·趣味科学画报(2019年12期)2019-02-28 11:55:02
岷峨诗稿(2017年4期)2017-04-20 06:26:43
新高考(英语进阶)(2017年12期)2017-02-26 11:37:34
电子制作(2017年24期)2017-02-02 07:14:16
四川电力技术(2015年5期)2015-12-19 11:04:52
电测与仪表(2015年16期)2015-04-12 00:44:32
电测与仪表(2015年20期)2015-04-09 11:53:56
