
基于MLX90614和UWB技术的矿工体温监测与定位系统设计
2023-06-13 09:37李晨晨苗曙光夏书娟
牡丹江师范学院学报(自然科学版) 2023年1期
李晨晨 苗曙光 夏书娟
摘 要:设计一款基于MLX90614和UWB技术的矿工体温监测与定位系统.系统采用便携式设计,采用MLX90614采集矿工体温数据,UWB定位技术,通过无线传输方式上传至上位机.测试结果表明,体温监测功能基本误差控制在0.02 ℃范围以内,定位误差为0.20米,综合平均误差为0.09米,可实现人员体温监测与精确定位功能.
关键词:体温监测;定位系统;UWB技术
[ 中图分类号 ]TP277 [ 文献标志码 ] A
Design of Miners' Body Temperature Monitoring and Positioning System Based on MLX90614 and UWB Technology
LI Chenchen,MIAO Shuguang*,XIA Shujuan,LIU Xiang,FU Jinnan
(School of Physics and Electronic Information, Huaibei Normal University, Huaibei, 235000, China)
Abstract: Design a miner temperature monitoring and positioning system based on MLX90614 and UWB technology.The system adopts portable design. The temperature monitoring adopts MLX90614 to collect miners' temperature data. The positioning adopts UWB positioning technology. The information is uploaded to the upper computer through wireless transmission. The test results show that the basic error of the temperature monitoring function is controlled within 0.02 ℃, the positioning error is 0.20m, and the comprehensive average error is 0.09m, which can realize the temperature monitoring and accurate positioning of personnel.
Key words: body temperature monitoring; positioning system; UWB technology
當前我国煤矿安全生产情况依然十分严峻,如何预防疫情聚集性风险和矿难事故,并对煤矿井下的“人”“机”“环”进行有效快速感知,成为亟待解决的问题.本文设计一款基于MLX90614和UWB技术的矿工体温监测与定位系统,能够实现矿工远距离体温监测与精确定位.
1 系统概述
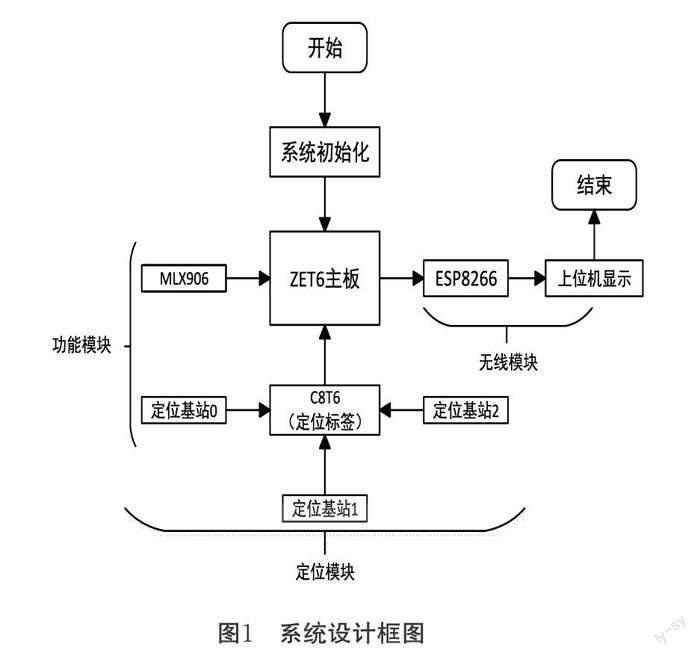
该系统具有疫情防控和人员精确定位两种功能.系统主板主控芯片采用STM32F103ZET6,搭载红外体温传感器MLX90614,实现体温采集.副板采用STM32F103C8T6芯片,利用UWB定位技术实现人员精确定位.[1]在主控芯片收到体温数据以及定位数据后,通过搭载的无线模块将数据发送至上位机界面显示.[2]显示界面通过不同颜色区分采集数据是否达到阈值,从而有效提醒工作人员进行判别,实现对井下人员体温监测与精确定位.系统分数据采集、数据传输、数据接收、数据显示四个部分.整体设计见图1.
数据采集部分 MLX90614红外体温传感器通过红外辐射能量采集温度,使用IIC协议与主控芯片相互通信,其热电堆传感器输出的温度信号经运算放大后,进行数模转换为数字信号,再通过低通数字滤波器存储在RAM存储单元中,并通过自带SMBus方式读取输出.[3]定位模块中,副板基站与标签之间通过板载DW1000芯片进行数据采集以及通信,C8T6芯片负责对数据进行处理.
数据处理部分 体温监测由体温传感器直接采集,采集到的数据由主板芯片处理,实现对采集数据的整合及格式修改.定位信息采集完毕后,同步发送至串口WIFI模块.定位信息模块由副板芯片进行数据处理.由于噪声、井下环境复杂等会造成数据误差,采用卡尔曼滤波对数据进行限幅或补偿.[3]数据采集处理完毕后,定位数据将传输给主控芯片.
数据传输部分 体温监测传感器与主板采用有线连接进行数据传输.定位标签依靠C8T6最小系统板将采集的位置数据通过串口发送给主板.主板与上位机传输数据采用ESP8266芯片,AP工作模式,利用UDP协议进行数据传输.[4]
数据显示部分 主机端接收到信息后,在上位机显示界面显示.上位机监测窗口可通过不同颜色的变换,实时提醒监测人员当前矿工体温以及位置信息.
2 关键技术
2.1 精确定位技术
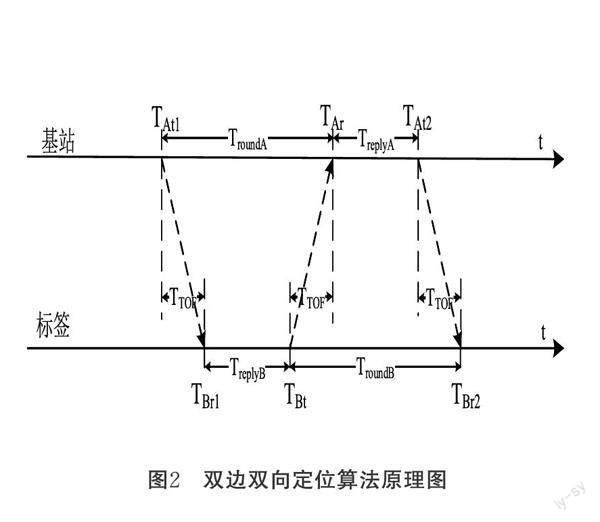
设计采用UWB 定位技术.DW1000芯片通过SPI总线协议与单片机建立通信,稳定抗干扰.定位技术采用TOA算法中的双边双向测距定位算法,通过基站与标签的三次信息交互并记录信号发送和接收的时间计算出两者的距离[5](图2).
标签A发送测距信号并记录此时的时间戳[TAt1],经过一段时间,基站B接收到信号并记录此时的时间戳[TBr1],延时一段时间[TreplyB]后向标签A发送应答信号并记录此时的时间戳[TBt],标签接收到应答信号并记录此时的时间戳[TAr],经过一段时间延时[TreplyA]后发送最终的测距信息信号,标签记录此时的时间戳[TAt2],基站在接收到测距信号后记录此时时间戳,至此三次信息交互完成.由于UWB信号的传播速度近似为光速,即为已知,只需计算出信号飞行时间[TTOF]便可求出两者距离.
[TroundA=TreplyB+2TTOFTroundB=TreplyA+2TTOF] . (1)
由式 (1)得:
[TroundA?TroundB?TreplyA?TreplyB =4T2TOF+2TTOF?TreplyA+2TTOF?TreplyBTroundA+TroundB+TreplyB+TreplyB=4TTOF+2TreplyA+2TreplyB] . (2)
由式(2)可得无线信号在基站与标签之间的传播时间为:
[TTOF=TroundA?TroundB?TreplyA?TreplyBTroundA+B+Treply1+TreplyB] . (3)
无线信号传播速度近似于光速c,因此,基站与标签的距离为:
[D=c?TTOF] . (4)
由式(3)可知,时间差根据自身的时间戳进行计算,因此,不需要基站和标签的时间同步即可实现距离的测量.[6]
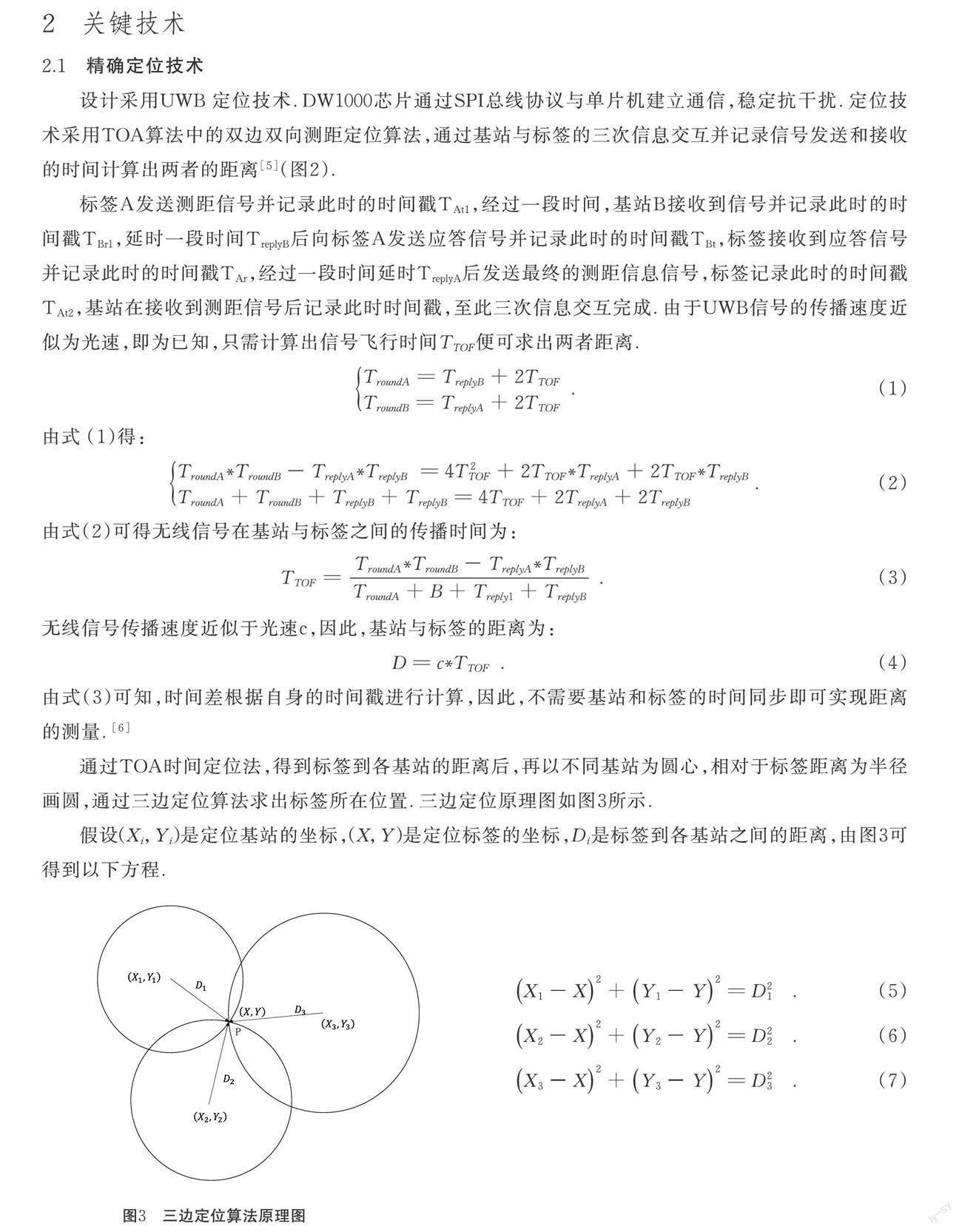
通过TOA时间定位法,得到标签到各基站的距离后,再以不同基站为圆心,相对于标签距离为半径画圆,通过三边定位算法求出标签所在位置.三边定位原理图如图3所示.
假设[(Xi,Yi)]是定位基站的坐标,[(X,Y)]是定位标签的坐标,[Di]是标签到各基站之间的距离,由图3可得到以下方程.
对公式(5)(6)(7)进行线化之后可得到方程[AZ=B].
[Z=XY],[ A=2X1?X32Y1?Y32X2?X32Y2?Y3], [B=X2 1-X2 3+Y1 2-Y2 3+D23-D21X2 2-X2 3+Y2 2-Y2 3+D23-D22] .
进而得到[Z=A?1B],最终得到当前标签P所在位置坐标.[7]
2.2 滤波处理
采用卡尔曼滤波对信号的到达时间测量值进行处理,以消除TOA测量值中的误差.对经过处理的TOA测量值重新进行TOA定位.[9]计算机仿真实验表明,该定位算法优于其他定位算法.
3 实验测试与分析
对体温传感器进行测试,该体温监测传感器解析精度为0.01 ℃,误差控制在0.02 ℃以内,较市面上其他测温传感器精确度和灵敏度更高,在测温方面具有良好的稳定性及适应性.[10]
定位测试开始前需要配置基站坐标,设置电子围栏禁区.测试均采用同一组基站坐标和相同电子围栏禁区.基站坐标分别是(0.00,0.00),(15.02,0.00)和(0.00,13.63),电子围栏设置为(5.00,5.00,5.00,5.00).通过定位测试可知,随着标签的移动,定位误差也会不同,这是由于不同位置标签采集数据受不同环境影响的结果,当标签位置处在测试边缘位置时,绝对误差越大,最大为0.22米;越靠近中心位置,绝对误差越小,最小为0.02米.结合实验数据,平均误差0.09米,达到预期效果.
4 结语
本文设计了一款用于体温监测和人员精确定位功能的井下监测系统,采用体温传感器MLX90614,实现对矿工体温状态的监测,具有精度高、易安装、非接触的特点.采用UWB超宽带技术定位,具有抗干扰性强、灵敏度高、定位精确度高等优势.采用ESP8266WIFI网络模块,将采集的体温和位置信息无线传输至地面上位机,实现远程显示,既保证了系统实时性,也可以有效避免井下环境复杂带来的布线困难等问题.该系统可以准确监测矿工体温变化,及时提供矿工的定位信息,对保障矿工生命安全具有重要意义.
参考文献
[1]周仁斌.基于UWB技术的煤矿井下人员精确位置监测系统设计[J].煤矿机械,2022,43(06):181-184.
[2]孫培民,孙鑫.基于单片机的通信系统[J].牡丹江师范学院学报:自然科学版,2009(03):29-30.
[3]陶杰,王欣,孙慧贤,等.基于MLX90614的温度实时检测系统[J].电子技术与软件工程,2017(21):75.
[4]黄文杰. 基于UDP的可靠高效数据传输协议的研究[D].北京:北京邮电大学,2019.
[5]郑昊,王琴,刘俊昊,等.TOA算法在UWB定位系统中的研究与应用[J].现代工业经济和信息化,2021,11:128-129.
[6]乔欣,孔兵.井下巷道TOA和TDOA联合估计的UWB定位算法[J].煤炭技术,2022,41(05):168-171..
[7]潘忠祥,江剑.基于UWB的三边优化算法研究[J].国外电子测量技术,2019,38(02):25-29.
[8]胡敬,田俊曦,邹世明,等.基于自适应卡尔曼滤波的联合RSS/TOA/INS无人机定位算法[J].无人系统技术,2022,5(02):62-70
[9]任昊誉,郭晨霞,杨瑞峰.卡尔曼滤波提高UWB测距精度研究[J].电子测量技术,2021,44(18):111-115.
[10]苗曙光,李淮江,李峥,赵小敏,杨一军.基于PIC18F4580的CAN总线多点温度采集系统设计[J].牡丹江师范学院学报:自然科学版,2013(04):19-20.
编辑:琳莉
