
潜艇水声对抗航空声呐作战效能仿真研究*
2023-06-12 10:54:40孙宝三张维利
指挥控制与仿真 2023年3期
康 乐,孙宝三,张维利
(中国电子科学研究院,北京 100041)
反潜直升机在执行反潜任务时,通常先利用被动声呐浮标发现目标,然后使用吊放声呐或主动声呐浮标对潜艇进行精确定位,为对潜攻击做准备。被动声呐浮标作为反潜直升机的主要设备,搜潜范围受潜艇的辐射噪声和海洋环境影响较大。潜艇处于潜望或者上浮时,如果电子侦察ESM接收到浮标发出的超短波无线电信号,则认为潜艇处于危险区。此时潜艇应迅速下潜,选择合理的航向、航速、航深等实现机动规避,降低浮标的探测效果。吊放声呐是反潜直升机攻潜前精确定位目标的主要设备。吊放声呐从发现目标到稳定跟踪目标需要一段时间,潜艇可以采取水声对抗手段影响吊放声呐探测,避免被稳定跟踪。典型潜艇水声对抗手段包括非器材对抗和器材对抗两类:非器材对抗包括变速、变深、变向、关机近底悬浮等,器材对抗包括气幕弹、噪声干扰器、声诱饵等。
随着计算机技术的发展,潜机对抗双方都在不断研究和提升自身的战术辅助决策能力。文献[1]从航空平台角度提出了反潜辅助决策需求。为更好地对抗航空平台,国内对潜艇规避问题进行了不少研究,文献[2]研究了主动声呐浮标对纯机动手段规避潜艇探测的效能,文献[3]研究了潜艇利用迪卡斯声呐浮标盲区规避跟踪等。这些研究从不同角度给出了潜艇对抗典型声呐浮标阵或吊放声呐的一些规避方法和建议,但上述研究方法多针对特定航空声呐类型和阵型,实际运用时存在一定的局限性。实际作战过程中,潜艇除区分主被动声呐类型外,还难以准确获得航空声呐的类型和阵型情况,因此,在水声对抗态势信息掌握不全的条件下,研究各种水声对抗手段对主/被动声呐探测效能的影响,对潜艇作战决策有参考意义。
1 水声环境模型
1.1 海洋噪声模型
浅海环境下海洋噪声谱级的经验公式[4]:
NLO(f)=10logf-1.7+6S+55
(1)
NLO(f)是噪声谱级(单位:dB),f是噪声频率(kHz),S是海况等级(S∈[0,9])。
1.2 声传播损失模型TL
声波在海水中传播时,随着传播距离的增加,能量逐渐衰减,因此,传播距离受限。造成传播损失的原因主要是扩展损耗,吸收损耗,声波反射、折射以及声波反射、折射引起的边界损耗。传播损失的复杂性很难准确描述,因此,工程上习惯使用球面扩展加上吸收损失对其进行估算[5]:
TL=20logR+βR×10-3
(2)
TL是传播损失(单位:dB),R是传播距离(单位:m),β是对数吸声系数(单位:dB/km)。工程上,有时直接根据海况对β做出估计:良好条件下β=2 dB/km,中等条件下β=(4~6)dB/km,不良条件下β=(7~8)dB/km,恶劣条件下β>9 dB/km。
2 声呐探测模型
反潜机通常投放数枚被动声呐浮标组成一个浮标场,对目标实施探测。
2.1 被动声呐方程
被动浮标对潜艇探测范围的预测通常采用被动声呐方程[5]:
SL-TL=NL-DI+DT
(3)
SL为潜艇辐射噪声的声源级;NL为背景噪声;DI为被动声呐的接收机方向性指数,被动浮标一般为全向侦听,所以DI=0;DT为浮标的检测阈;TL为水声传播损失。
辐射噪声SL与潜艇航速、噪声之间的关系[6-7]:
(4)
其中,vc是潜艇航行的临界速度(单位:kn);v100是潜艇100 m深度时航行临界速度(单位:kn);p是海平面上标准大气压(单位:Pa);ρ是海水密度(单位:kg/m3);g是重力加速度(单位:m/s2);H是潜艇所处深度(单位:m);pd是潜艇所处深度的水的饱和蒸汽压力(单位:Pa);p100是100 m深度时水的饱和蒸汽压力(单位:Pa);SL是潜艇所处深度的辐射噪声等级(单位:dB);v是潜艇航速(单位:kn);a是潜艇类型系数(a≥0),参考表1中潜艇类型和辐射噪声总声级,本文取安静型潜艇a=1;Δ为潜艇速度超过临界航速后辐射噪声声源级的增量,参考文献[6-7]和表1中辐射噪声总声级结果,本文假设Δ取值约20 dB;b表示潜艇速度超过临界航速后辐射噪声随航速的变化斜率。根据文献[8]实际测量结果,超过临界速度后,航速每增加2 kn,噪声级约增加2.5 dB,因此本文取b=1.25。
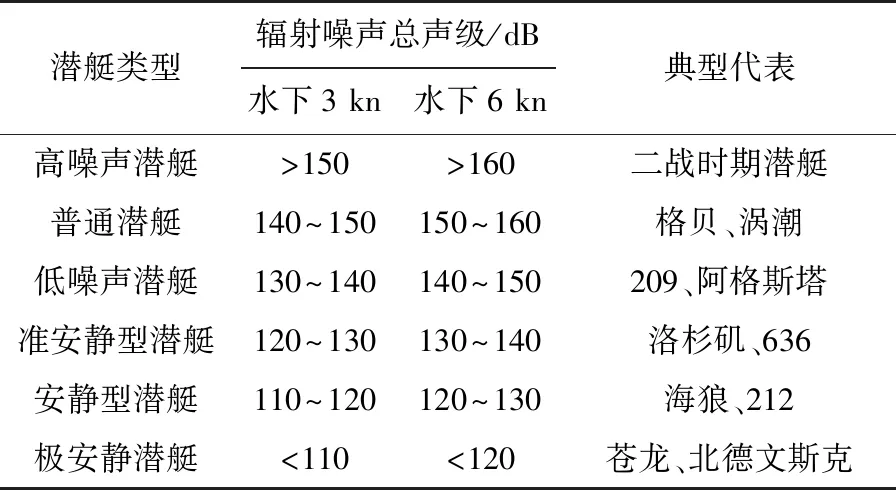
表1 根据辐射总声级对潜艇分类[9]
2.2 主动声呐方程
噪声条件下,主动声呐对潜艇的探测范围预测采用如下方程[5]:
SL-2TL+TS=NL-DI+DT
(5)
其中,SL为主动声呐发射声源级;TS为目标强度;DI为主动声呐的接收机方向性指数;DT为主动声呐的检测阈;NL、TL同公式(3)。
混响遮蔽条件下,主动声呐对潜艇的探测范围预测采用如下方程[5]:
SL-2TL+TS=RL+DT
(6)
其中,RL是混响级,TL、TS、DT同公式(5)。
式(5)、(6)中指向性发射声源级SL的计算方法参见公式(7)[10]:
SL=170.8+10logW+DI
(7)
其中,W是辐射声功率(单位:W);DI是发射指向性指数(单位:dB)。
目标反射强度TS与声波入射角度、目标几何形状以及目标表面的抗声发射特性密切相关,如图1所示。
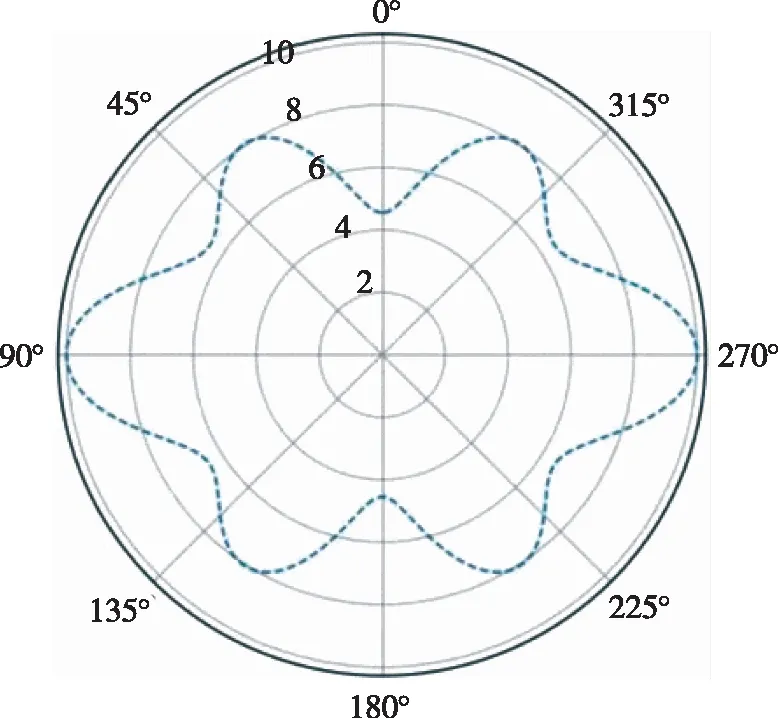
图1 潜艇目标强度和入射舷角的关系Fig.1 Relationship between submarine target strength and angle of incidence of acoustic sound
一般情况下,目标反射强度值随着声波入射舷角变化呈现近似“蝶形”分布,由此根据蝶形曲线方程确定目标的反射强度[11]为
TS=TSmax×[16.17-2.98cos 2β-3.083cos 6β]/22.223
(8)
TSmax是目标正横时最大反射强度(单位:dB),β是声波入射舷角(单位:°)。
潜艇近底时,海底混响是主动声呐重要的干扰[5]。
(9)
海底散射强度Sbottom通常用下列公式估算[5]:
Sbottom=-27+10log (sin2θ)
其中,θ是掠射角(单位:°),r是水平距离(单位:m),c是声速(单位:m/s),τ是脉冲宽度(单位:s),Ø是等效合成波束宽度(单位:°)。
3 潜艇对抗模型
航空声呐需要一段时间才能实现发现、稳定跟踪等功能,在潜艇已被声呐接触发现的不利条件下,潜艇水声对抗的目的是切断反潜机探测收敛过程,破坏反潜机进入攻击流程的条件。潜艇对抗航空声呐的手段包括机动对抗和器材对抗。
3.1 机动对抗
潜艇机动对抗包括变深、变向、变速和近底关机。变深可以减少空化噪声,提高临界速度vc,提高机动性。变向可以改变声呐波束入射角,减小目标强度。
根据国外数据分析和有关潜艇水下旋回机动性能的理论计算,潜艇旋回机动参数与航速的变化关系如式(10)所示[5]:
(10)
其中,Rm是潜艇机动旋回半径(单位:m),Vm是潜艇航速(单位:kn),ωm是潜艇回旋角速度(单位:°/s)。
变速可以缩短潜艇离开声呐威力范围时间,参考文献[12]内图1,在动均匀条件下,潜艇在5°舵角、6节航速下垂速(Uτ)约为0.5~1 m/s。常规潜艇水平方向加速度[13]为0.04~0.06 m/s2。
3.2 器材对抗
气幕弹通过吸声对抗主被动声呐。单枚气幕弹产生宽1.5~2.0 m、高50 m的气幕,一次发射10枚可以形成(15~20)m×50 m的气幕。对(15~20)kHz声波的插入损失约20 dB,对(8~15)kHz声波的插入损失约15 dB,对(5~8)kHz声波的插入损失约8 dB[5]。频率越低,屏蔽效果越差。
宽频噪声干扰器主要用于对抗主动声呐,原理是通过抬高背景噪声降低探测距离。噪声干扰器的噪声强度谱级范围大致在138~187 dB[14],本文的计算取其中间值160 dB。假设吊放声呐接收器处的噪声是海洋环境噪声NLO,宽频噪声干扰器声源NLG,经过扩散传播TLG后,抵达声呐接收机的噪声计算公式[2]为
NL=10log(100.1NLO+100.1(NLG-TLG))
(11)
NL是声呐接收器处背景噪声,NLO计算见式(1),TLG计算见式(2)。
自航式诱饵模拟潜艇的辐射噪声和机动运动作为假目标对抗被动声呐。同时还可以引导主动声呐脉冲信号模拟目标反射特性,对抗主动声呐,这种情况下只需将诱饵看作定常目标强度TS的潜艇就行。由于自航式诱饵属于暴露式器材,本文认定其为对抗主动声呐的手段。
4 信息处理模型
4.1 环境噪声信息处理
被动声呐采用被动宽带方式检测信号,根据式(1)对检测范围内噪声谱进行平均:
(12)
其中,NLO是平均噪声级(单位:dB),NLO(f)定义计算同公式(1),fmax、fmin是被动声呐侦听频率的上、下限(单位:Hz),被动浮标的工作频带一般为10 Hz到10 kHz[6]。
4.2 航空声呐信息处理
航空声呐从接触发现到稳定跟踪识别目标需要一定的流程和时间。单枚浮标一般只能接触和发现目标,多枚声呐浮标在共视条件下,例如3枚LOFAR浮标交叉覆盖,4枚LOFAR浮标CODAR阵共视等连续监测S分钟(或S′个积分周期)才能稳定跟踪识别目标。主动声呐同样需要连续M个检测周期内N次以上的发现,才能形成稳定跟踪识别,平均检测时间为
(13)
其中,Td是稳定跟踪条件下的平均检测时间(单位:s);i是检测次数;N是稳定跟踪识别最低检测成功次数;M是检测周期次数;τ是单个检测周期时间(单位:s),计算公式为
(14)
其中,dmax是航空声呐最大检测距离(单位:m),c0是声速(单位:m/s)。
现代声呐一般都具备多目标检测处理能力,但识别确认还须依赖声呐员[10]。声诱饵对抗的目的是增加操作员识别时间,诱骗操作员识别错误。假设声呐员对每个目标的识别时间是μ个检测周期,声呐员将真目标识别成真目标的识别率是α,将真目标识别成假目标的识别率是1-α,声呐员将假目标识别成真目标的识别率是1-β,将假目标识别成假目标的识别率是β。典型反潜直升机声呐员是1人,潜艇使用γ个声诱饵对抗吊放声呐的成功率为
(15)
通过释放声诱饵,导致声呐员平均处理时间延长,其平均处理时间为
(16)
其中,E(T)是平均处理时间(单位:s),μ是声呐员对每个目标的声呐检测周期总数,τ同式(14),α、β、i同式(15)。

在潜艇释放声诱饵进行诱骗的情况下,反潜直升机声呐员最大处理时间为
Tmax=(1+γ)μτ
(17)
其中,Tmax是声呐员最大处理时间(单位:s),γ、μ、τ参数定义同式(16)。
4.3 潜艇声呐信息处理
潜艇对被动声呐没有感知能力,依靠上浮后ESM感知来确定被动声呐的位置。
潜艇声呐的发现、定位处理能力远比航空声呐强,潜艇对主动声呐的探测距离远大于航空声呐的探测距离,在同等条件下,包括噪声干扰下,认为潜艇也能感知反潜直升机主动声呐。
相比主动航空声呐需要双波程时间后才能获得目标信息,潜艇可以在主动航空声呐回波过程中提前δ秒启动声信息处理,那么原则上潜艇至少可以提前δ秒发现主动声呐。
(18)
式中,d是航空声呐到目标的距离(单位:m),c0是声速(单位:m/s)。
5 仿真计算
5.1 仿真条件
据统计,50%的航运噪声来自4.93海里范围内,如果4.93海里范围内没有船只,航船噪声级会非常低,可不考虑。如果4.93海里范围内有1艘或多艘船只,噪声级会非常高[10]。本文假设潜机对抗区域10海里内不存在航船干扰,工作海况3级,中等水文条件,海面处于1个标准大气压,标准海水密度[9]是1 010 kg/m3,潜艇工作深度范围为60~250 m,100 m深处潜艇临界速度是7.94 kn,敷瓦潜艇正横目标强度为10 dB[4]。
根据上文分析假设气幕弹对(0~1)kHz插入损失约1 dB,宽频噪声干扰器声源级160 dB,自航式诱饵模拟10 dB目标强度。
假设声呐浮标连续3个检测周期接触1次以上判断为发现;发现后,多枚声呐浮标共视5 min以上判断为稳定跟踪。吊放声呐连续3个检测周期接触1次以上判断为发现;发现后连续测9个检测周期发现6次以上判断为定位;发现后检测3个周期可以识别目标。
5.2 环境噪声
根据式(11),计算3级海况下,100 Hz、1 kHz和10 kHz三个频点在百赫兹级带宽范围内的噪声谱级如表2所示。
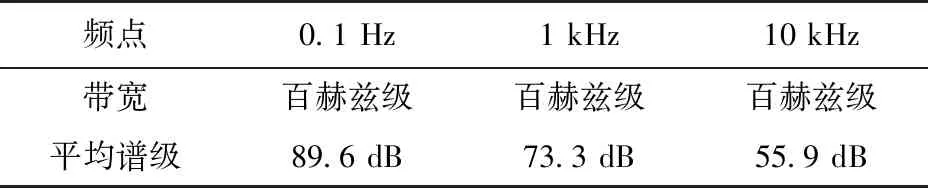
表2 噪声平均谱
5.3 临界速度与深度关系
潜艇航行深处饱和蒸汽压力只是海面大气压的1%~2%,是深度造成压力的1‰~2‰,饱和蒸汽压力临界速度计算结果的影响可以忽略不计[15],将式(4)中水的饱和蒸汽压力pd和pd100设为0,计算典型深度下临界速度见图2。

图2 潜艇临界速度随深度变化曲线Fig.2 Curve of submarine critical speed with depth
5.4 对被动声呐工作性能影响
一般情况下潜艇无法感知被动声呐浮标,但潜艇通过侦听声呐浮标空投入水声音或潜望、上浮,其电子侦察可接收浮标发出的超短波无线电信号,则判断出被动声呐位置并进行水声对抗。
被动声呐侦听潜艇辐射噪声时,辐射噪声只与潜艇的航速有关,为尽快离开声呐覆盖区域,潜艇应选择最短距离机动脱离。以声呐浮标为圆心,声呐浮标探测范围为R,潜艇航向正北,距离声呐浮标距离d,声呐浮标处于潜艇舷角α,如果潜艇直接直线脱离,根据三角形两边和大于第三边,图3中x>R-d,潜艇直线脱离的距离比潜艇转弯背向再脱离声呐浮标的距离要大,本文不考虑这种脱离策略。
假设潜艇处于不利条件(舷角90°),脱离策略包括:转弯变向背离浮标,临界速度脱离、高速脱离、全速脱离、最小噪声速度脱离,以及变深同时临界速度脱离、全速脱离、最小噪声速度脱离等。

图3 潜艇直线脱离示意图Fig.3 Submarine evasion diagram
本文选取某R值进行仿真,表3、表4分别是潜艇转弯+机动对抗和潜艇转弯+变深对抗的仿真结果。
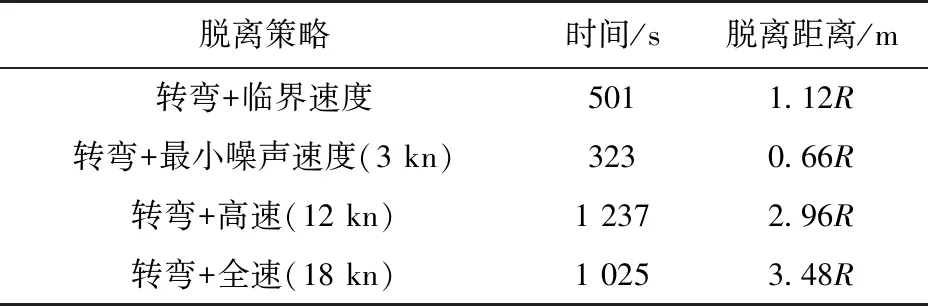
表3 潜艇初始d=1/2R,舷角90°等深仿真
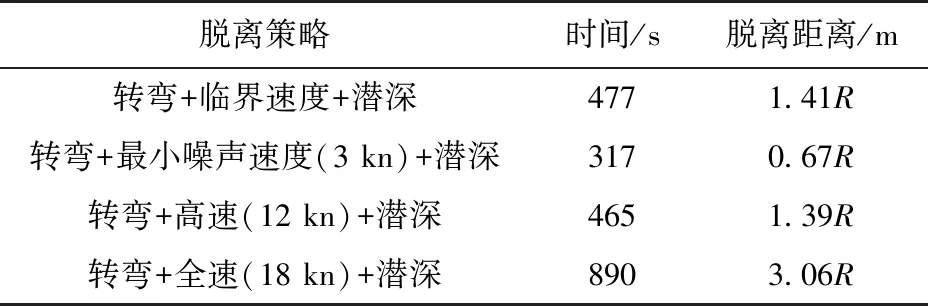
表4 潜艇初始d=1/2R,舷角90°变深仿真
为防止主动暴露,对抗被动声呐时,原则上不使用暴露性器材,只使用气幕弹。但气幕弹只能覆盖一定范围和宽度,采用气幕弹对抗时,潜艇无法变深。气幕弹配合机动对抗的仿真结果如表5所示。
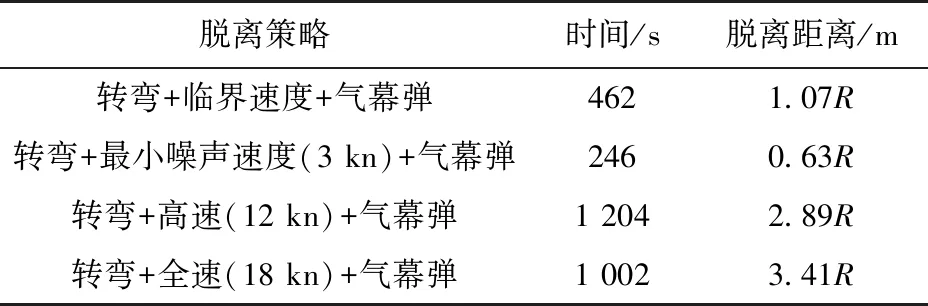
表5 潜艇初始d=1/2R,舷角90°气幕弹仿真
表3~表5仿真结果表明,对付被动声呐的最佳策略是采用最小噪声速度机动,控制水声辐射。气幕弹的对抗效果略优于潜深,但存在不能变向变深的缺点,实战中,仅在被动声呐方向明确时可以使用,其他情况下建议采用潜深策略。
5.5 对吊放声呐工作性能影响
吊放声呐有主动、被动等多种工作模式,由反潜直升机使用。而反潜直升机悬停时间有限,因此,一般情况下使用主动模式。吊放声呐工作时,潜艇通过艇载被动声呐感知确定吊放声呐方位,为尽快离开吊放声呐覆盖区域,潜艇一般选择最短距离机动脱离。如果潜艇采用直线脱离,则脱离距离长,且脱离过程中目标强度大,吊放声呐探测距离长,因此,潜艇采用转弯变向背离吊放声呐,减小目标强度,再机动脱离。本文选取某R值进行仿真,表6是潜艇机动对抗吊放声呐策略效果。
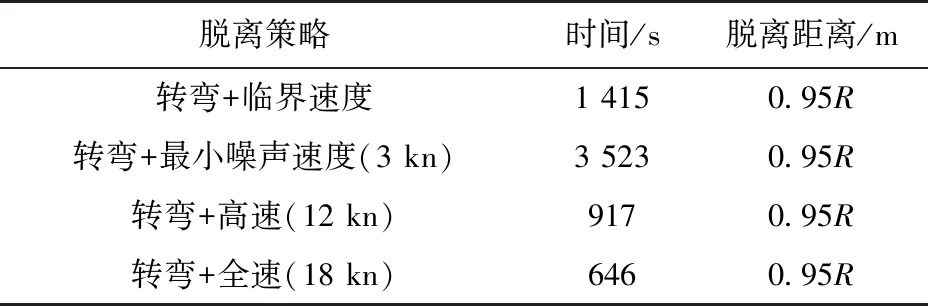
表6 潜艇初始d=1/2R,舷角90°仿真

气幕弹、宽频噪声干扰器、自航式诱饵配合机动对抗吊放声呐。考虑吊放声呐方向增益,为提高对抗性,可以在潜艇与声呐之间插入气幕弹,表7是潜艇使用气幕弹对抗吊放声呐策略效果。
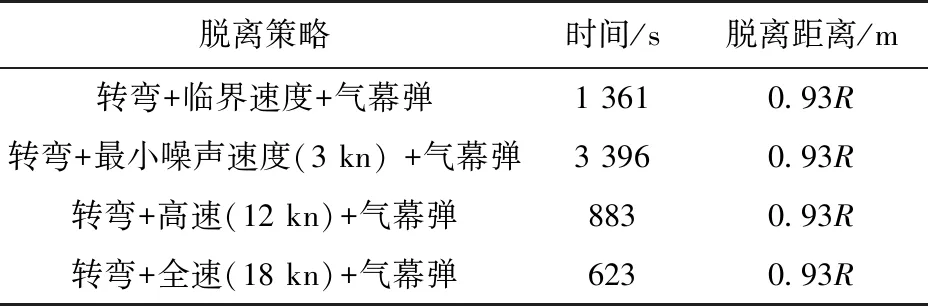
表7 潜艇初始 d=1/2R,舷角90°气幕弹仿真
考虑到吊放声呐波束方向性,为提高对抗性,可以在潜艇与吊放声呐之间插入宽频噪声干扰器,吊放声呐、干扰器、潜艇处于同一直线。表8是潜艇使用宽频噪声干扰器对抗吊放声呐策略效果。
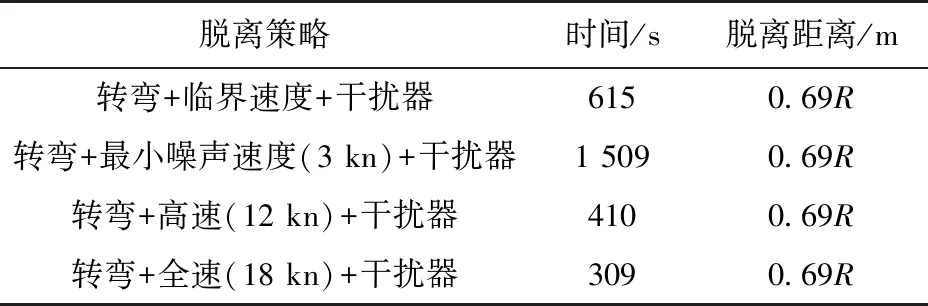
表8 潜艇初始d=1/2R,舷角90°干扰器
假设宽频噪声干扰器距离吊放声呐4 km,NL0= 73.3 dB,宽频干扰器数量和主动声呐声源处背景噪声关系如图4所示。综合考虑潜艇宽频噪声干扰器携带总量、单轮发射对抗效果和吊放声呐多目标侦听能力,如果潜艇距离吊放声呐较近,建议单次至少投放2枚以上干扰器,加大噪声背景干扰,使吊放声呐多目标侦听通道饱和。如果距离吊放声呐较远,考虑费效比,可以一次投放1~2枚干扰器。使用上还可以间隔多次投放,通过多组宽频噪声干扰器在空间上的分散接力,干扰吊放声呐跟踪识别,增加处理难度和时间。
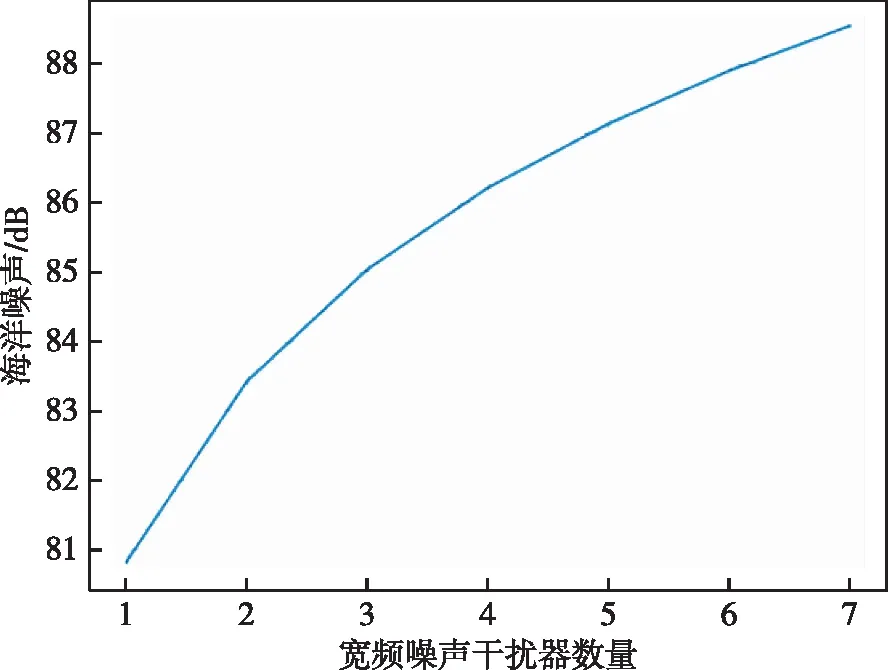
图4 宽频干扰器数量与声呐背景噪声等级关系Fig.4 Relationship between noise jammer number and noise acoustic level
同步发射声诱饵能进一步提高吊放声呐跟踪识别难度。假设α=0.8,β=0.6,声呐员单目标识别时间为90 s,根据式(15)、(16)得到表9的声诱饵对抗效果。表9表明,声诱饵越多,效果越好,但考虑多轮对抗和实际使用的需要,建议声诱饵2枚一组使用,一方面诱骗成功率接近50%,识别时平均处理时间130 s和最大处理时间270 s,大幅降低了识别后继续开展目标运动分析结果的可信度,满足潜艇多轮次对抗需要。潜艇抛洒声诱饵后还可以通过大幅改变运动状态,进一步降低吊放声呐目标运动分析解算精度,破坏武器发射条件。
表6~表9仿真结果表明,吊放声呐声接触、跟踪条件下,潜艇应高机动脱离,同时抛洒宽频噪声干扰器(2枚一组)、声诱饵(2枚一组)等水声对抗器材,加大吊放声呐背景噪声,提高声呐员识别错误率和识别处理时间,降低吊放声呐目标运动分析的定位精度,避免被精确定位。如果潜艇与吊放声呐水平距离极近,无法机动脱离,且距海底近时可以采用近底关机悬浮策略作为对抗手段。
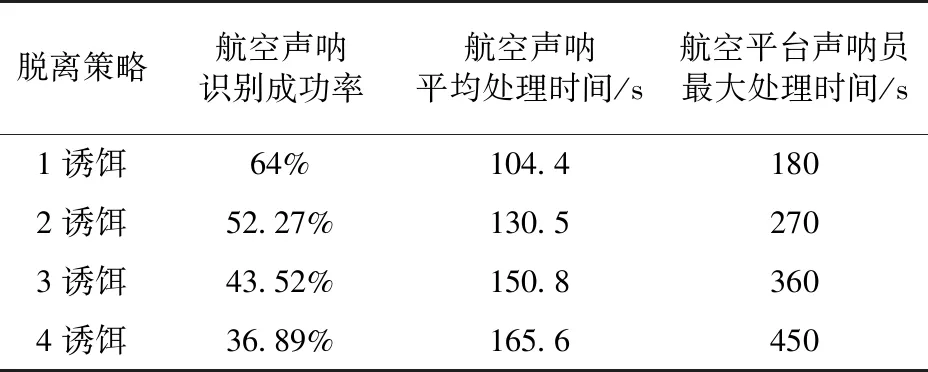
表9 声诱饵对抗效果(α=0.8,β=0.6)
6 结束语
针对潜艇水声对抗航空声呐策略选择问题,本文构建了水声环境模型、声呐探测模型、潜艇对抗模型,提出了一种考虑声接触、跟踪、定位、识别处理的航空声呐信息处理模型,开展潜艇水声对抗航空声呐作战效能仿真,仿真结果表明:1)对抗被动声呐的最佳策略是采用最小噪声速度机动,控制潜艇水声辐射噪声。气幕弹的对抗效果略优于潜深,但存在使用约束多的缺点,实战中可以在明确探测方向时使用,否则采用潜深策略更为方便灵活。2)吊放声呐声接触、跟踪条件下,潜艇应高机动脱离,同时抛洒水声对抗器材。采用宽频噪声干扰器的方式时,当潜艇距离吊放声呐较近,建议一次投放2枚以上干扰器。潜艇距离吊放声呐较远时,可以单次投放1~2枚干扰器。间隔多次投放可以进一步提高对抗效果。采用声诱饵方式时,考虑单轮对抗效果和多轮对抗的需求,建议单次抛洒2枚声诱饵。如果潜艇与吊放声呐水平距离极近,且距离海底较近时,可以采用近底关机悬浮作为对抗策略。
本文实现的水声环境模型、声呐探测模型、潜艇对抗模型和机载水声信息处理模型可以为潜机水声对抗提供仿真参考,仿真方法可以推广到复杂对抗态势,相关仿真和分析结论为潜艇水声对抗航空声呐提供了决策依据。
猜你喜欢
家教世界·创新阅读(2023年3期)2023-06-09 00:19:23
家教世界·创新阅读(2023年2期)2023-06-07 23:53:42
家教世界(2023年7期)2023-03-22 12:11:24
家教世界(2023年4期)2023-03-04 07:31:28
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:52
科普童话·神秘大侦探(2022年4期)2022-05-26 19:57:56
作文小学高年级(2022年2期)2022-03-03 08:54:32
海洋信息技术与应用(2020年3期)2020-08-24 07:25:10
小学科学(学生版)(2019年10期)2019-11-16 08:55:14
现代防御技术(2016年1期)2016-06-01 12:13:27
