地铁保卫者:一种5G智能生态下的轮式移动机器人
2023-06-10 12:41:51黄呈翰张清伟曾孟芊吴欣渟郭睿妍陈思羽
电脑知识与技术 2023年12期
黄呈翰 张清伟 曾孟芊 吴欣渟 郭睿妍 陈思羽

关键词:人工智能;5G生态;移动机器人;地铁
中图分类号:TP311 文献标识码:B
文章编号:1009-3044(2023)12-0019-03
1 目前研究近况
随着中国城市对轨道交通建设需求的持续扩大以及城市基础设施建设技术的飞速发展,我国城市轨道交通工程也步入了高速发展的新轨道。截至2022 年6 月,中国51 个城市已投入运营的城轨线路9 573.65 公里,其中78.64% 的城市轨道交通里程为7 529.02公里。作为城市轨道交通的主力军,地铁的技术性能直接影响着城市轨道交通的运载能力。目前,我国地铁采用人工静态检测为主、少量车辆动态检测辅助的常规检测方式。传统的检测方法虽然已广泛应用,但成本较高、费时费力。可见,传统的检测方法存在着操作质量差,存在安全隐患,缺乏客观要求,夜间操作时容易出现漏检等一系列问题,极大地降低了检查的工作效率和准确性。
在这样的背景下,5G技术和轮式机器人[1]结合应用于地铁安全保护,智能化科技化发展,是新时代下地铁巡检的发展必然趋势。5G智能生态轮式移动机器人的投入使用,不但可以一定程度上健全地铁巡查作业系统,增加工作精准度与专业程度,进而提升巡检效能,还能有效降低人力成本,为地铁交通的安全管理和有序运行提供强有力的保障。总而言之,地铁智能巡检机器人是地铁安全防范管理的新思路,是机器人技术在地铁隧道领域的革新式运用。
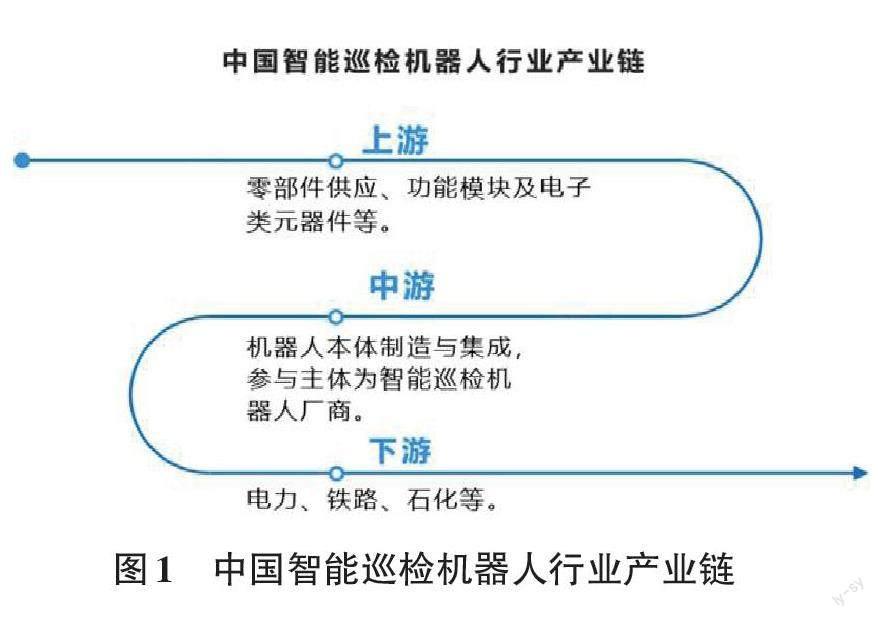
我国智能巡检机器人的生产线,从上往下依次可以分成上游零部件、中游自动化机器人的本体生产以及集成、下游应用。
移动机器人可以应用在很多场景。随着AI技术的发展,机器人得以广泛应用在各类场所。近几年,我国城市地铁机器人的种类越来越多,比如在2020年东方红广场车站就有一位“新同事”——“小豹”,该机器人具有面部识别、导航等功能,可以与旅游者进行短暂交谈;成都地铁上也有智能巡检机器人,该机器人能够实现对地铁底部转向架、车体等重要部位的自动检测,一旦发现故障,立即向后台发出警告;杭州轨道交通监控机器人能够自动识别车辆编号,并将数据结果存入列车档案;通过对监测点的缺陷进行识别,可以对故障点进行精确的定位,并将故障的具体位置通知操作人员,并将故障图像反馈给维修人员。极大地改善了地铁的运输和维护工作。
相关数据显示,每四千米的管廊隧道机器人会配备一台巡查机器人和一台灭火机器人,则2018年的隧道机器人市场容量约为1.2亿,如果以年均25%的速度配备隧道巡查机器人,以67万元/台测算,2019—2021年隧道巡查机器人市场需求大约为4.2亿,可见市场需求潜力巨大。
2 仿真实验
本设计主要用Proteus 仿真软件和Keil 编译软件。关于智能体温控制器,以单片机AT89C51型芯为基础,水质传感器DS18B20型和1602 LCD型液晶显示,所组成的一种多功能单片机水和体温计。由于使用了数字温度传感器DS18B20作为设计,所以可以达到数码测量环境气温的功能,并且通过与1602 LCD 的显示器接口,还可以实现不间断的环境温度指示。关于电机驱动电路设计,本设计采用STM32微控制器对巡检车进行控制,巡检车运动控制就是对电机控制。系统将传感器所收集的信息输入STM32微控制器中,信号经过控制器处理后,控制电机驱动、将环境数据显示到OLED屏上、安全報警等。利用超声波传感器收集方位、时间等数据,作为STM32微控制器的信号源。
在实际运行过程中,优先考虑障碍物,若环境出现了动态障碍物,可以通过得到的传感器接收的信息,能及时地作出可行的路径规划,即使规划的路线不一定保证是最优的,但是可以保证有实时改变路径对动态障碍作出及时反应避障的优势[2]。
SLAM技术主要被用来解决,机器人在未知环境中的未知位置进行运动时的定位与建图问题。SLAM 的概念最早出现在1986年的国际机器人与自动化大会上,由Durrant Whyte等人提出。到目前为止,SLAM 技术已经广泛应用在机器人定位导航、VR/AR、无人机、自动驾驶等众多领域[3]。双目视机器人SLAM技术的总体结构大致包括四块,依次为信息收集和传递层,以及图像处理层-位置和数据库的构建-执行机构。系统提供了一种能够即时发送环境影像给PC端的双目摄像机,并将环境影像即时传送给PC。通过采用可移动小车的编码器,电子罗盘传感器,可以提供一种很简单的可移动的机器人系统。
双目视觉移动机器人SLAM系统工作流程的关键步骤:
1) 基于SIFT特征信息提取的算法,先截取图片感兴趣区域,之后再逐步减小像素尺寸空间中像素金字塔的层数和特点表示向量的角度,以降低估算工作量。
2) 立体匹配问题则是利用KD-tree的数据组织方式,把整体匹配问题转变成在K维空间的二叉搜索问题,以提升整体匹配的有效性。
3) 在当前定位和位姿的确定部分,是指通过扩展卡尔曼滤波算法,来融合视觉信号和内部解码器以及电子罗盘所收集的信号,从而进行对移动机器人当前定位和姿势的最小方差系数估算。
4) 数据联系是把从各个时间区域传感器中获取到的地标信号加以联系的过程,在本研究中主要使用欧氏距离最近方法作为特征联系。
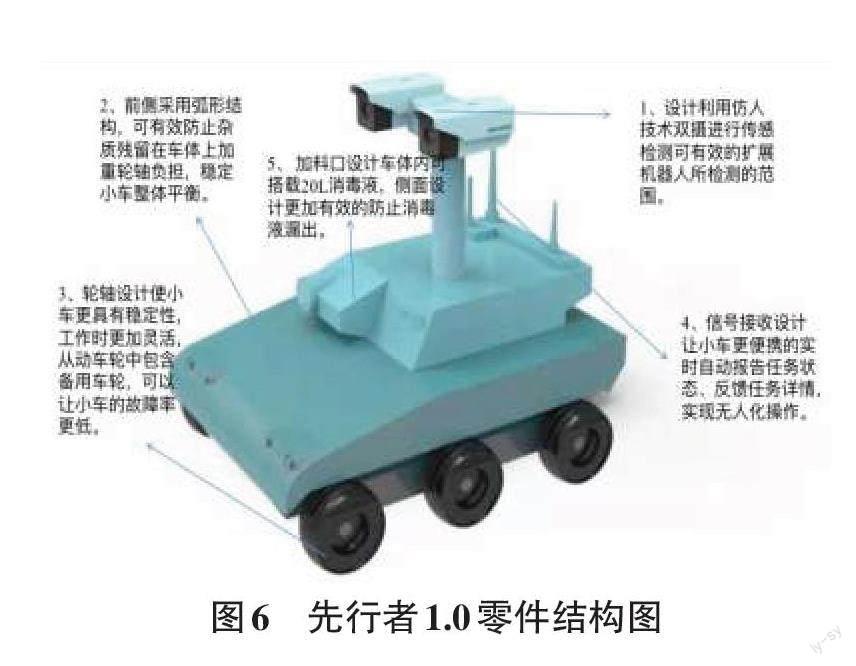
3 结构设计
先行者1.0:长为0.5米,宽为0.4米,高为0.5米,车盘重达40kg,较重的车盘可使小车在高速运动下拥有更强的抓地力,并且可以很大程度上避免在转弯时发生侧翻;该小车最大车速可达30km/h,采用EPB电子系统进行驱车制动,相比其他使用机械制动的机器人更具有安全性,更适应人潮涌动的地铁环境;驱动电机最大功率可达16 kw,强有力的电机可以使车盘加重的小车能够达到更高的工作状态同时装载的大容量电池可使小车拥有续航里程200 km;在采用2路CAN的通信协议下,先行者1.0拥有了超强防雷功能,CAN数据全透明通信,波特率可自适应,可适应各种高低温的工作环境。先行者1.0在基于AI人工智能技术的5G技术下,采用模块化设计,不仅装载有消毒水箱,同时可按规定路线自主完成消毒清洁任务、自主避障、自主检查清洁效果,自动报告任务状态、反馈任务详情,实现无人化操作,独立完成消毒清扫工作。
先行者2.0:长为0.5米,宽为0.4米,高为0.5米,在原有先行者1.0的基础上,先行者2.0增加了底盘车重并且装载了18 kw的更强大驱动电动机,此外先行者2.0所拥有的机器视觉、3D SLAM技术、图像处理技术等可以使装载的机械臂能精准地对目标进行自主抓取,该系统可通过运动学逆解算法和运动规划算法,得出当前位姿到目标位姿的可行路径,系统将根据物体的形状,大小等确定末端执行器中心位置,進而得出末端位姿,然后根据机械臂末端位姿转换为关节空间各关节的期望位置,结合环境信息进行运动规划,再通过驱动程序控制各关节电动机进行实际动作。
先行者2.0所搭载的机械臂利用电机驱动,相比于气动和液压驱动的能量二次转化,利用电机驱动机械臂将会更加节能。该机械臂利用夹持式手部最高可抓重30kg,拥有五个自由度,圆柱式坐标,同时拥有500 mm伸缩行程,40 mm/s伸缩速度
机械臂夹紧力计算:
铜和橡胶的摩擦系数f=0.2
可抓持最大重量:G=40×10(N)
3Nf=G 由于ΣM=0,故
4 未来展望
人工智能加速和工业结合,人工智能科技也将保持持续成长的姿态,AI人工智能也开始融入国民经济各领域当中,成为制造业发展的新动能。基于此,本文设计了一款基于AI和5G的地铁轮式移动机器人,其主要应用场景为地铁。团队将通过设计的轮式移动车底盘,运用先进图像处理、机器视觉、语言交互技术、人脸识别、物体辨识、3D SLAM科技、避障科技、大数据处理人工智能研究、5G等高新技术,同时搭载多种传感器打造的智能轮式机器人,可以满足在特定场景中使用。总体而言,该轮式移动机器人可以保证工作时的路况检测和人脸识别的实效性、人脸识别过程中的准确性以及小车的安全性与清洁铁轨过程中的精确性,确保由摄像头输入的图像无延迟,可以有效地解决清洁轨道过程中产生的安全问题。除此两个主要核心发展资源之外,仍有一系列的配套设施以及结构流程,来完成整一个消毒的过程。
经过多次实验测试,本文设计的基于5G智能生态下的轮式移动机器人达到了预期的效果,在消毒清扫工作以及轨道安全巡逻和检测等多方面达到了预期的效果。可以展望,该机器人在未来的多种场合将会承担重要的角色,包括传统的按规定路线自主地完成消毒清洁任务、避障及检查清洁效果,自动反馈任务状态及详情、轨道安全巡逻和检测等,也会在日常的生活中发挥重要作用。
猜你喜欢
社会科学战线(2022年8期)2022-10-25 03:15:58
北京航空航天大学学报(2022年6期)2022-07-02 01:59:12
军民两用技术与产品(2021年10期)2021-03-16 06:05:36
经济技术协作信息(2018年7期)2019-01-14 03:05:40
中国军转民(2018年1期)2018-06-08 05:52:57
汉语世界(The World of Chinese)(2017年4期)2017-09-29 02:11:06
制造技术与机床(2017年3期)2017-06-23 08:11:21
中国卫生(2016年6期)2016-11-23 01:09:02
筑路机械与施工机械化(2014年7期)2014-03-01 03:00:18
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28 12:21:31