
2022款智己L7智驾摄像头标定异常
2023-06-07 13:43:44浙江韩晨洪汽车维修大师工作室韩晨洪
汽车维修与保养 2023年3期
◆文/浙江韩晨洪汽车维修大师工作室 韩晨洪

韩晨洪
汽车维修工程师、高级技师、第五届全国交通运输行业机动车职业技能竞赛“汽车综合故障诊断与排除”项目全国第一名。“全国五一劳动奖章”“浙江工匠”“杭州工匠”获得者。
故障现象
一辆2022年生产的上汽智己L7纯电动汽车,前驱搭载了175kW电机,后驱搭载了250kW电机,累计行驶里程4811km。该车因前部发生碰撞事故而进店进行维修,维修结束后仪表提示智驾摄像头需进行重新标定,但在标定的过程中诊断仪一直显示标定失败。
故障诊断与排除
在智驾摄像头标定失败后,对车主进行了详细的问诊,询问车主在事故发生前智驾功能是否使用正常,车主反映未出现事故时车辆智驾功能无异常,此次车辆事故也并不严重,只更换了前保险杠及前保险杠上的环视摄像头总成。
问诊结束后,维修人员再次分别用编程软件SIPS和工程诊断软件ZDS对车辆智驾摄像头进行标定。按维修手册要求,标定时车辆以低于40km/h的速度进行匀速行驶,但当标定程序进行到60%时,诊断仪弹出对话框,并显示故障码71036A0239EF0700(图1)。随后,标定程序自动终止,标定失败。
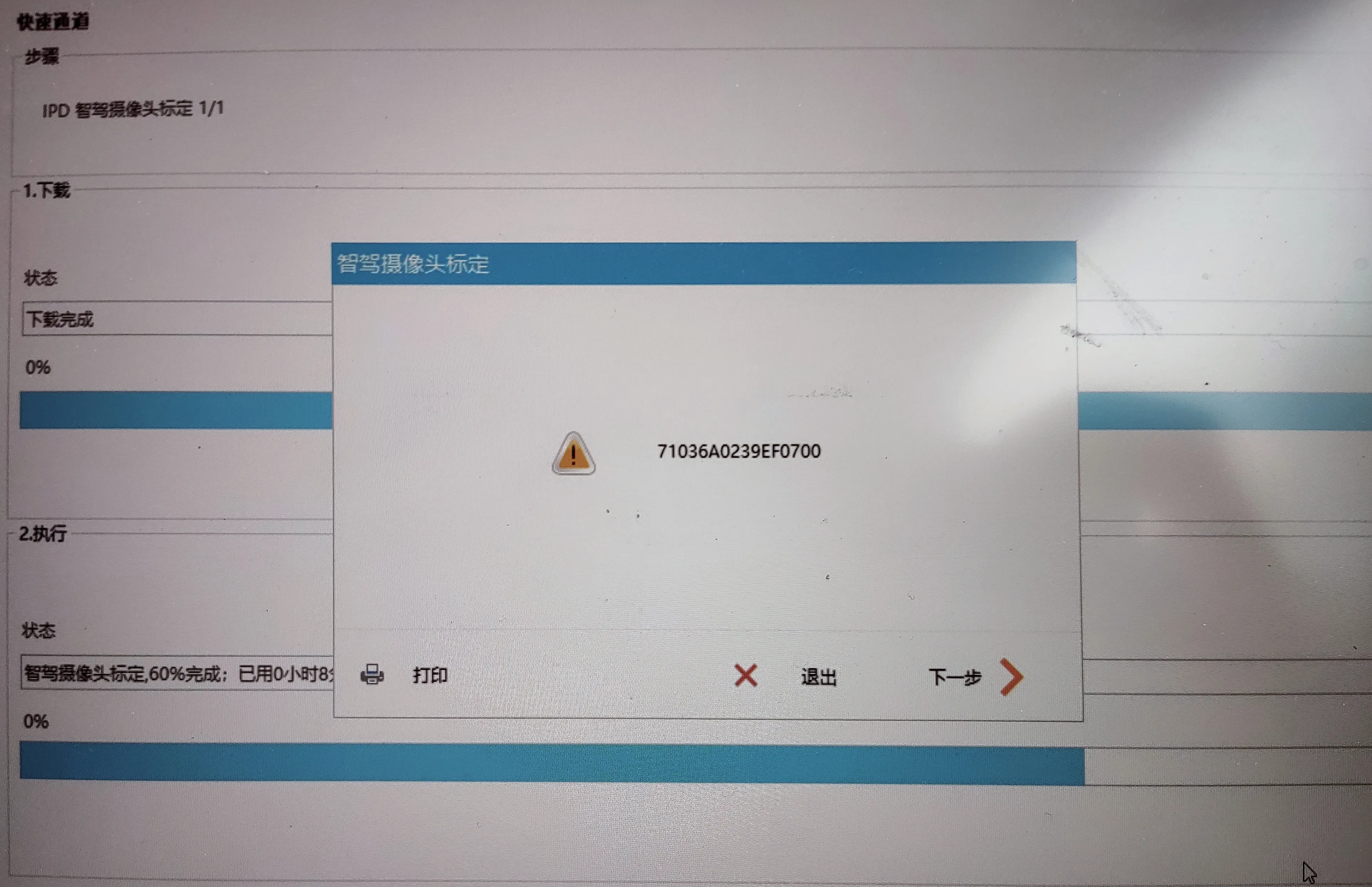
图1 标定时诊断仪上弹出的对话框
检查前保险杠上的环视摄像头线束插头连接、前环视摄像头安装位置、前环视摄像头外观有无脏污等情况,结果均未发现异常。将诊断仪(VDS)与车辆连接,读取故障码,发现智驾域控制模块IPD内无任何故障码。
查阅维修通讯和TAC技术简报,未发现类似故障的维修信息和解决方案。由于上述步骤未能找到故障原因,接下来按照标定时出现的故障现象,在维修手册中查找相关标定失败的解决方案。但维修手册中并未对标定失败时出现的71036A0239EF0700代码有任何的说明与解释,只强调了标定智驾摄像头时的要求,如:须在光照和天气良好的情况下进行、车速0~40km/h、在两侧有较多静态参考物并有较多弯路的道路上行驶一段时间(推荐城市道路)、驾驶过程中转向和加减速应柔和等。
由于维修手册没有找到任何对解决标定问题有帮助的信息,接下来只好与厂家TAC进行电话沟通。他们建议重点检查车辆后部周视摄像头,维修人员对后部周视及后部环视摄像头进行了仔细的检查,从外观上看并没有发现摄像头存在松动或安装位置有歪斜等异常情况(图2)。

图2 故障车后部的周视及环视摄像头
打开车辆全景显示功能时,发现后部全景影像拼接的图案存在歪斜的现象(图3),用工程U盘对360°全景影像进行重新标定后,全景影像后部的显示还是存在歪斜的情况,并没有任何的改变。

图3 故障车360°全景显示的图像
通过外部检查没有发现后部周视及环视摄像头的安装存在问题,但是从全景影像的拼接图片来看,确实明显存在偏差,因此维修人员决定拆下后保险杠对后部周视及环视摄像头的安装情况进行重点检查。
拆下保险杠后发现,后周视及环视摄像头安装底座与后保固定位置的卡扣出现了松脱(图4)。

图4 故障车与正常车后周视及环视摄像头安装底座
通过上述检查可以看出,由于后部周视摄像头和环视摄像头的安装支架位置出现偏差,使得智驾摄像头无法标定。重新安装摄像头支架,并将卡扣固定到位后,重新标定智驾摄像头,标定一次完成,车辆恢复正常。
维修小结
本案例中,由于后周视及环视摄像头安装位置出现偏差,导致车辆在进行智驾摄像头标定时出现异常,使得标定工作不能正常完成。由于后部周视及环视摄像头支架固定结构的特殊性,在外部检查时并不能发现摄像头存在松动或位置的偏差,以后碰到类似问题在处理时需要特别注意。
摄像头一般由镜头、PCB芯片总成、壳体、标签和支架等组成。图像传感器负责将镜头采集的光信号转换成电信号,图像处理芯片负责完成图像处理和信息采集工作。在摄像头安装位置存在偏差的情况下,对智驾摄像头进行重新标定时,模块会重新对各摄像头安装位置的数据进行重新比对,当摄像头反馈的安装位置与标准安装位置数据之间存在偏差时,就会标定失败。标定一旦成功,如果后期周视及环视摄像头安装位置出现轻微偏差,则不会影响智驾功能开启及使用,也不会出现故障提示,只是会导致IPD图像的拼接出现偏差。当然,此时如果开启智驾功能,智驾的精准度也会随之下降。
需要特别注意的是,通过查询相关资料,笔者发现,从标定失败时弹出的对话框中显示的错误代码中,实际包含了“哪个摄像头”“出现了什么故障现象”的提示信息。以本案例中遇到的错误代码71036A0239EF0700为例,其中:“39”表示某摄像头旋转外参数与设计值偏差过大(此位置的不同数字代表了不同的故障现象);“EF07”用于定位具体是哪个相机出现了故障。在此位置,正常车辆标准的数据为FF07,通过十六进制转二进制,FF07对应的标准二进制数据是1111111100000111。在这个标准数据中,每一个1代表了车上的某个智驾摄像头,每一个数字代表的摄像头位置如表1所示,具体的排列顺序为8、7、6、5、4、3、2、1、0、0、0、0、0、11、10、9。

表1 摄像头编号与名称对应表
表示故障摄像头位置的十六进制数值,可通过网上的进制转换器来实现转换,如:本案例中的“EF07”通过转换后可得到二进制代码“1110111100000111”(图5),将其与标准二进制“1111111100000111”进行比对可以看出,其中的第四位数字为“0”,而标准数据的第四位是“1”,因此说明存在故障的摄像头为5号后周视摄像头,须要重点检查。

图5 EF07转换成二进制后得到的代码
如果故障摄像头的位置代码为“EF03”,利用进制转换器转换后得到的二进制代码为“1110111100000011”(图6),将其与标准二进制数据“1111111100000111”进行比对可以看出,其中的第四位和第十四位数字均为“0”,而标准数据的第四位、第十四位均为“1”,因此存在故障的摄像头为5号后周视摄像头和11号后鱼眼摄像头,应重点检查。
综上可以看出,在弹出的错误代码中找到故障摄像头代码(第11~14位),将其转换成二进制代码,再这16位二进制代码与标准二进制数据“1111111100000111”进行比对,找到不同代码的位置对应的摄像头编号,通过表1即可查询到具体的摄像头,具体如表2所示。

表2 故障摄像头位置查询表(以EF03为例)
猜你喜欢
中等数学(2021年8期)2021-11-22 07:53:38
汽车维修与保养(2020年11期)2020-06-09 05:42:16
数学大王·低年级(2019年10期)2019-11-25 08:23:26
中等数学(2019年4期)2019-08-30 03:51:44
动漫星空(2018年11期)2018-10-26 02:24:02
动漫星空(2018年2期)2018-10-26 02:11:00
动漫星空(2018年9期)2018-10-26 01:16:48
动漫星空(2018年5期)2018-10-26 01:15:02
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年3期)2016-11-07 09:03:34
