3A级大型脉冲式太阳模拟器的仿真与实现
2023-06-01 03:04:52袁五辉丁官元刘海波李颂战
太阳能 2023年5期
袁五辉,丁官元,刘海波,袁 驰,李颂战
(1. 武汉爱疆科技有限公司,武汉 430070;2. 湖北水利水电职业技术学院,武汉 430070;3. 武汉纺织大学,武汉 430200)
0 引言
光伏科学与工程、育种、航天卫星空间模拟、高温试验等领域对稳定的高质量日照条件存在巨大需求[1-5]。但是,自然太阳光非常容易受到季节更替、昼夜交替、气候变化、天气变化等自然界各种因素的干扰,无法满足科学研究人员和产业界对稳定日光的需求。在此情况下,太阳模拟器这种能够模拟均匀、稳定太阳辐射的仪器设备应运而生,并逐步成为现代工业、医疗、能源、航空、材料工程与环境工程等多个领域中不可缺少的重要设备[6-8]。
行业通常规定不同大气质量下的辐照不稳定度(irradiation instability)、辐照不均匀度(spatial non-uniformity of irradiance)、光谱匹配度(spectral match)是太阳模拟器的决定性参数,并根据不同的参数范围划定了A级、B级、C级太阳模拟器[9]。
在目标测试区域的辐照不均匀度Ni的计算式可表示为:
式中:Imax为目标测试区域的平面任意取一点的辐照度最大值;Imin为目标测试区域的平面任意取一点的辐照度最小值。
辐照不稳定度指标是要求到达目标测试区域平面的光线在一定时间内保持稳定的辐照度,从而保证测试的准确性。辐照不稳定度Ti的计算式可表示为:
式中:Emax为规定时间内在目标测试区域的平面任意取一点的辐照度最大值;Emin为规定时间内在目标测试区域的平面任意取一点的辐照度最小值。
国际电工委员会(IEC)在国际标准IEC 60904-9:2020《Photovoltaic devices——Part 9:Classification of solar simulator characteristics》中又将辐照不稳定度细分为代表整个I-V测试过程中辐照度变化的长期不稳定度(longterm instability,LTI),以及代表I-V测试取点过程中辐照度变化的短期不稳定度(short-term instability,STI)。
IEC 60904-3:2019《Photovoltaic devices——Part 3: Measurement principles for terrestrial photovoltaic (PV) solar devices with reference spectral irradiance data》[10]定义的AM1.5G光谱辐照度数据常用于地面光伏发电装置或太阳电池相关测量领域,其辐照度分布界定了在300~1200 nm光谱波长范围内各波长区间辐照度对总辐照度的占比,具体如表1所示。

表1 IEC 60904-3: 2019定义的辐照度分布Table 1 Irradiance distribution as defined in IEC 60904-3: 2019
光谱匹配度表征了太阳模拟器与IEC 60904-3:2019给出的300~1200 nm波长范围内辐照度分布的偏差,体现了太阳模拟器的光谱辐照度分布与真实太阳的光谱辐照度分布之间的差别。
IEC 60904-9:2020中给出的太阳模拟器等级分类[11]如表2所示。
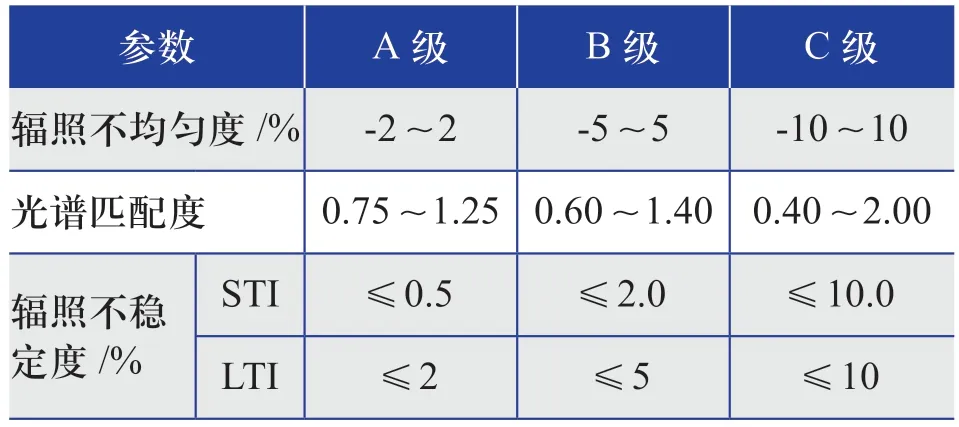
表2 IEC 60904-9: 2020中的太阳模拟器等级分类Table 2 Level classification of solar simulators according to IEC 60904-9: 2020
在碳达峰和碳中和(下文简称为“双碳”)目标的驱动下,太阳电池的应用越来越广泛,需求也越来越大[12]。随着光伏工业制造水平的大幅度提升,太阳电池制造商、相关科研和产业机构对更大辐照面积、更小空间占用,以及辐照不稳定度、辐照不均匀度、光谱匹配度均达到A级标准的3A级大型太阳模拟器提出了新的要求与期待[13]。然而,目前市面上符合要求的3A级大型太阳模拟器大多都遭遇了国外知识产权壁垒,且这些设备通常结构复杂、成本高昂。
基于此,本文在光学仿真软件LightTools环境下,设计了一种由光源(长弧氙灯)、椭球面矩形反射体、光学挡光板等部件构成的大面积、近距离的3A级大型脉冲式太阳模拟器,利用光学原理调整、优化了各部件的结构参数,并成功研制了辐照不稳定度、辐照不均匀度、光谱匹配度3项关键指标实测结果均达A级的大型脉冲式太阳模拟器原型系统。
1 3A级大型脉冲式太阳模拟器光学系统的设计
经典太阳模拟器主要包括由光源和椭球面反射镜组成的聚光系统、光学积分器、准直物镜等部件。由光源(即氙灯)发出的光线经椭球面反射镜进行聚光后,通过光学积分器微分再积分,然后再由准直物镜反射后变成平行光出射到达测试面,从而形成均匀的辐照面。经典太阳模拟器的光路原理如图1所示。

图1 经典太阳模拟器的光路原理Fig. 1 Principle of light path of classical solar simulator
由于经典太阳模拟器中的光学积分器存在球差,对太阳模拟器性能的影响较大,并且经典太阳模拟器存在设计难度大、成本高、结构复杂、能量利用率低等缺点,因此,本文舍弃了光学积分器和准直物镜等部件,设计了一种由光源、椭球面矩形反射体、光学挡光板等部件组成的一种结构相对简单的高精度的3A级大型脉冲式太阳模拟器。该设备采用分体机柜式设计,主体包含暗室、脉冲光源控制器和测试控制柜3个部分。3A级大型脉冲式太阳模拟器的总体方案如图2所示。

图2 3A级大型脉冲式太阳模拟器的总体方案Fig. 2 Overall scheme of class 3A large-scale pulse solar simulator
1.1 暗室的结构设计
暗室是一个内部涂有黑色吸光涂层的完全封闭的腔体,其结构示意图如图3所示。腔体内在光路通道上设置了2个挡光光阑,其形状如图4所示,用于拦截大角度的光线,从而在测试面上形成2 m×3 m的光斑。

图4 挡光光阑的结构示意图Fig. 4 Schematic diagram of structure of light blocking aperture
暗室内部和挡光光阑表面的黑色吸光涂层用于吸收300~1800 nm波长范围内的光线,其作用是大幅减弱发散光线的传播,使其不能到达测试面,防止发散光线对测试面的辐照参数产生干扰。黑色吸光涂层反射率随入射光线波长变化的关系如图5所示。

图5 黑色吸光涂层反射率随入射光线波长的变化关系Fig. 5 Relationship of change between reflectivity of black absorbing coating and wavelength of incident light
1.2 光源选型和光源模块的结构设计
光源是太阳模拟器的关键部件之一,其与光学系统的辐照不稳定度、光谱匹配度、辐射功率等参数紧密相关。氙灯因具有发光光谱与太阳光谱匹配度高、随气压波动小、光谱能量排布稳定等优点,成为了目前太阳模拟器光源的最优选择之一[14]。考虑到长弧氙灯具有较大的发光功率、较低的管压,以及更好的安全性和稳定性等优点,本文采用新加坡Excelitas公司生产的长弧氙灯作为光源。该长弧氙灯的外形为柱状结构,其额定输出的光脉冲宽度为10 ms,最大可以达到20 ms。在10 ms的脉冲时间内平均输出光功率为150 kW。该长弧氙灯可以以15 s的时间间隔进行发光,正常使用寿命约60000次。
采用上述长弧氙灯构建氙灯模块。氙灯模块由灯罩、长弧氙灯及底座、滤光片、散热风扇、标准电池(安装在标片盒内部)等组成,其结构示意图如图6所示。氙灯模块还设计了独立的反馈微调标片(同样置于标片盒内),每个长弧氙灯都能单独进行控制和调节。

图6 单个氙灯模块的结构示意图Fig. 6 Structure diagram of a single xenon lamp module
通常情况下,单个氙灯模块的光学扩展量不足以满足整个太阳模拟器的总光学扩展量,因此本文采用4个氙灯模块组合使用的方案,通过氙灯光源能量叠加的方式来满足太阳模拟器总光学扩展量的要求。然而,4个氙灯模块的布局会极大影响整个光学系统的能量利用率和测试面的辐照均匀性,因此,如何合理地设计氙灯模块之间的距离、位置、夹角等参数是整个光学系统设计的难点之一。为了达到辐照面能量利用率尽可能高、辐照不均匀度尽可能低的要求,本文采用了4个氙灯模块呈正方形空间排列的方式进行排布,如图7所示。

图7 氙灯模块的排布位置示意图Fig. 7 Diagram of layout of xenon lamp module
每个氙灯独立控制且控制回路相同,降低了设备的复杂度,并保证了设备工作的可靠性。氙灯间的工作协调由主控模块完成,通过光负反馈系统来实现氙灯的恒定光强控制,即采样氙灯输出的光强作为反馈信号来控制氙灯的工作电流,从而实现光强的稳定输出。这一结构屏蔽了整个控制回路中的干扰,从而精准地控制了氙灯输出光强的稳定性。
此外,为防止氙灯过热,模组内部设计了2个风扇风冷散热结构,并且氙灯底座下的安装板采用高绝缘耐压耐热电木板材料,确保了整个光源模块能够安全运行。
1.3 光学挡光板的设计
在经典太阳模拟器的光学系统中,通常采用光学积分器作为匀光器件的核心组件来实现辐照面较高的辐照均匀度[15]。但是,光学积分器的结构设计复杂、成本较高,附加镜的球差会使边缘成像模糊而导致辐照面的辐照均匀度下降,并且光束发散角受到附加镜与透镜阵列之间距离的影响后会导致能量利用率降低[16]。此外,对于大辐照面积的情况,其散热问题也难以解决。因此,本文设计了一种匹配椭球面矩形反射体聚光镜的光学挡光板结构,如图8所示。通过对光学挡光板进行合理的结构参数优化与位置排布设计,在不对辐照度产生过大影响的情况下大幅降低了辐照面的辐照不均匀度。
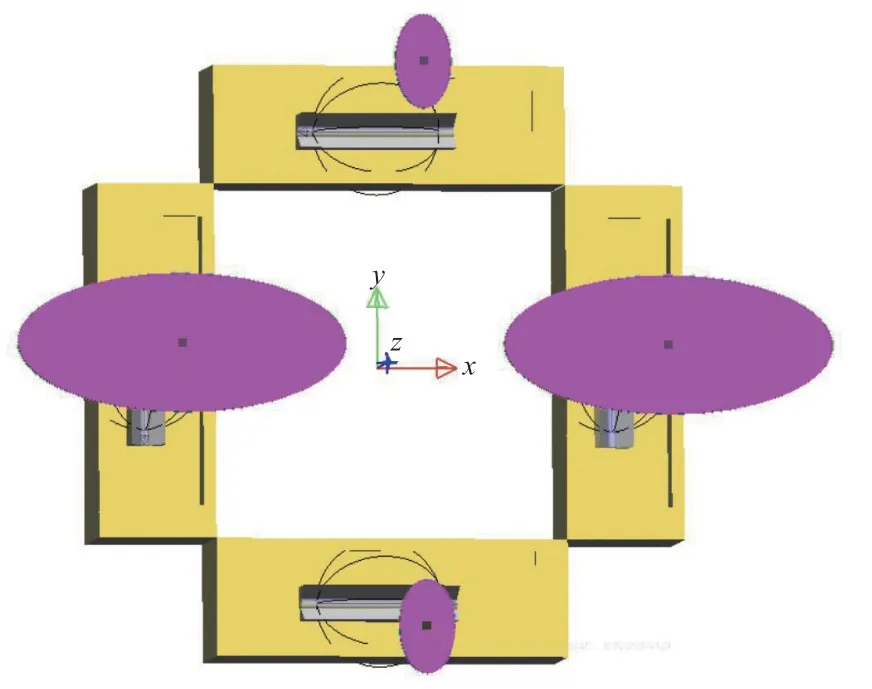
图8 光学挡光板的结构示意图Fig. 8 Structure diagram of optical light barrier
2 3A级大型脉冲式太阳模拟器的仿真优化和实现
2.1 A级辐照不均匀度的仿真优化
为了使大辐照面上的辐照度符合更大辐照面积、更小空间占用的要求,且同时达到A级辐照不均匀度,必须合理设计椭球面矩形反射体和光学挡光板的各个参数。首先,根据光学理论对上述部件的关键参数进行估算,并确定初始值;然后,在光学仿真软件LightTools环境下,对整个太阳模拟器光学系统进行蒙特卡洛仿真分析,通过设定合理的优化方案和目标函数进行数值仿真与优化,提升光学系统的各项性能指标。
SolidWorks是基于特征、参数化和实体建模的设计软件平台,在SolidWorks环境下对各光学元件的尺寸和位置进行建模,然后导入到LightTools软件中。在LightTools软件中依次设定各光源的详细参数,包括圆柱形光源的半径(5 mm)、长度(160 mm)、辐射功率(150 kW)等;设定不同实体平面的光学属性,包括反射体平面的光学属性设为反射、光学挡光板平面的光学属性设为吸收体、其他实体平面的光学属性设为平滑光学等。由于生成的随机光线数量越多,仿真分析得到的结果越准确,因此本文设置了1亿条光线来进行光线追迹。按照辐照不均匀度检测点的取样要求,在距离光源4 m的位置设置接收器;接收器为3 m×2 m的矩形平面,并划分为10×10的网格;利用接收器辐照度分布二维图像来显示辐照度的分布情况。在无光学挡光板的情况下,4个氙灯模块的光线追迹情况如图9所示,接收器平面(即辐照面)上的辐照度分布如图10所示。
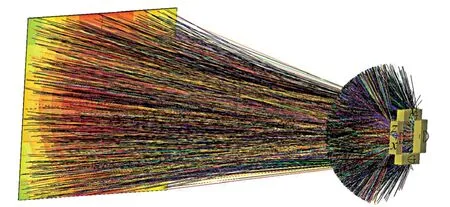
图9 无光学挡光板的情况下,4个氙灯模块的光线追迹情况Fig. 9 Light tracing of four xenon lamp modules without optical light barriers
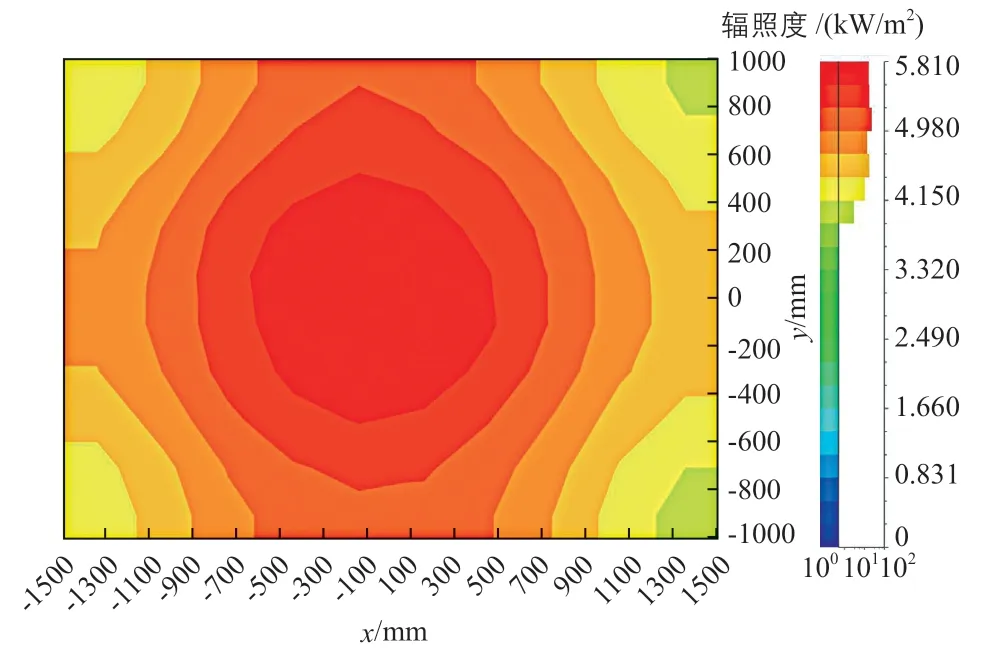
图10 无光学挡光板的情况下,接收器平面上的辐照度分布Fig. 10 Irradiance distribution on the receiver plane without optical light barrier
由图10的仿真结果可见:光源在辐照面上形成了中心辐照度强、四角辐照度弱的凸型辐照度分布,此时仿真计算得到的平均辐照度为5.210×103W/m2,辐照面的辐照不均匀度为18.0%,与辐照不均匀度低于2.0%的A级标准要求相去甚远。
通过对整个光学系统的分析可知,影响太阳模拟器辐照不均匀度的参数主要包括:
1) 4个氙灯模块之间的相对距离与位置。虽然每个氙灯模块发射到辐照面边缘部分的光线较少,但是呈正方形排列的4个氙灯模块发出的光线到达辐照面后会有部分发生重合,因此辐照面边缘的辐照度会随着4个氙灯模块之间相对距离和位置的不同而发生改变。4个氙灯模块之间的相对距离越远,则光线重合部分越少,辐照面中心的辐照度越低,辐照不均匀度会降低,但辐照面整体的辐照度也会降低;4个氙灯模块之间的相对距离越近,则光线重合部分较多,辐照面中心的辐照度越强,辐照不均匀度会上升,但辐照面整体的辐照度也会上升。
2)椭球面矩形反射体的光学参数。光源光线的投射角受椭球面矩形反射体的影响最大,反射体不同的曲面系数和曲率,会导致由光源出射后经椭球面矩形反射体反射的光线的投射角发生很大改变,从而导致辐照面的辐照不均匀度随之改变。
3)光学挡光板的大小、尺寸和位置。光学挡光板会通过阻挡特定位置和角度的出射光线而对辐照面不同位置的辐照度和整体的辐照不均匀度产生极大地影响。
对太阳模拟器光学系统的参数进行优化。在各主要光学元件的参数初始值确定后,进行1亿条光线追迹,根据光线追迹的结果分析辐照面的辐照不均匀度;然后将光学挡光板的大小、位置、形状,以及椭球面矩形反射体的曲面系数和曲率设置为优化变量,将辐照面的辐照度和辐照不均匀度设为目标函数,进行参数优化和结构调整。
光学系统参数优化后,4个氙灯模块的光线追迹情况如图11所示,辐照面上的辐照度分布如图12所示。

图11 光学系统参数优化后的4个氙灯模块的光线追迹情况Fig. 11 Light tracing of four xenon lamp modules after optimization of optical system parameters

图12 光学系统参数优化后的辐照面上的辐照度分布Fig. 12 Irradiance distribution on the irradiation surface after optimization of optical system parameters
从图12可以看出:在距离光源4 m位置的3 m×2 m 辐照面的着色图中,从蓝色到红色表示辐照度依次增强,最大辐照度为4.93×103W/m2,最小辐照度为4.74×103W/m2,辐照面的辐照不均匀度为1.93%,达到了A级标准。
2.2 太阳模拟器原型系统的建立与测试
2.2.1 原型系统的建立
在仿真结果的指导下,依据优化后的光源、椭球面矩形反射体,以及光学挡光板的大小、位置、形状等所有参数进行精密加工和安装,完成太阳模拟器原型系统的实物制造。优化后的太阳模拟器原型系统的实物结构照片如图13所示。
图13 优化后的太阳模拟器原型系统的实物结构照片Fig. 13 Photo of physical structure of optimized solar simulator prototype system
2.2.2 原型系统的测试
采用光电探测器表征辐照度,根据光电探测器测得的辐照度结果对氙灯的电流进行调节,使辐照面的平均辐照度在1000±5 W/m2;然后记录在测试面10×10网格内光电探测器的辐照度值,并确定辐照度最大值和辐照度最小值;最后将数值带入式(1),计算得到原型系统辐照不均匀度的实际测试结果为1.86%,与仿真结果的一致性良好,满足IEC 60904-9:2020中A级辐照不均匀度的设计要求。
本文设计的太阳模拟器原型系统的实测光谱和AM1.5G标准太阳光谱的对比如图14所示。

图14 太阳模拟器原型系统实测光谱和AM1.5G标准太阳光谱的对比Fig. 14 Comparison between measured spectrum of solar simulator prototype system and AM1.5G standard solar spectrum
从图14可以看出:通过曲线在300~1200 nm波长范围内的积分面积对比,得到该太阳模拟器原型系统的光谱匹配度为0.91~1.08,达到IEC 60904-9:2020中A级光谱匹配度的设计要求。
稳定的辐照度是太阳模拟器能实现高精度光输出的保障。实际测试过程中,将光源开启20 min,选取在每隔10 ms中光源输出的辐照度,然后根据式(2)计算得到该太阳模拟器原型系统辐照不稳定度的实测结果为0.289%,达到IEC 60904-9:2020中A级辐照不稳定度的设计要求。
3 结论
本文在光学仿真软件LightTools环境下设计了一种由长弧氙灯、椭球面矩形反射体、光学挡光板等部件构成的大面积、近距离的3A级大型脉冲式太阳模拟器。通过对椭球面矩形反射体的曲面系数和曲率,以及光学挡光板的大小、形状、位置等参数进行研究与优化,将太阳模拟器的理论辐照不均匀度由18.00%降低至1.93%;通过光源选型和滤光片实现了与标准太阳光谱的良好匹配;通过光源质控、光负反馈系统及散热系统的配合,实现了太阳模拟器良好的辐照稳定性。
在仿真结果的指导下,完成了太阳模拟器原型系统的实物制造,并对其关键参数进行了实测。实测结果表明:在距离光源4 m位置的辐照面(3 m×2 m)上,平均辐照度在1000±5 W/m2时获得了低至1.86%的辐照不均匀度及0.289%的辐照不稳定度,在300~1200 nm波长范围内的光谱匹配度为0.91~1.08,达到IEC 60904-9:2020标准中3A级太阳模拟器的要求。
该光学系统的仿真结果为太阳模拟器的光学设计提供了理论参考,原型系统的成功研制为光伏、育种、航天等领域的应用提供了技术支持和实践经验,为国家“双碳”目标的实现提供了助力。
猜你喜欢
哈尔滨工程大学学报(2023年8期)2023-08-28 03:36:54
少年文艺·开心阅读作文(2020年3期)2020-04-07 03:34:13
无损检测(2019年7期)2019-07-25 09:42:22
上海涂料(2018年4期)2018-08-13 12:24:22
电子制作(2018年9期)2018-08-04 03:30:52
指挥控制与仿真(2018年3期)2018-06-11 12:37:04
发明与创新(2018年6期)2018-04-01 11:11:05
发明与创新·中学生(2018年2期)2018-02-07 16:41:58
系统工程与电子技术(2016年11期)2016-11-11 08:22:53
公民与法治(2016年18期)2016-05-17 04:17:47