运输类旋翼航空器飞行控制适航要求研究
2023-05-30 02:03:44陈宇金李宏
中国民航大学学报 2023年2期
陈宇金,李宏
(中国民用航空江西航空器适航审定中心,南昌 330072)
运输类旋翼航空器适航规定[1](CCAR-29-R2)对进行合格审定的运输类旋翼航空器没有做最小重量限制。然而,正常类旋翼航空器适航规定[2](CCAR-27-R2)对进行合格审定的正常类旋翼航空器的最大重量进行了限制,即适用于最大重量等于或小于3 180 kg 的旋翼航空器。因此,运输类旋翼航空器实际是指最大重量大于3 180 kg 的旋翼航空器。
旋翼航空器通常是指直升机,其飞行控制系统(操纵系统)与固定翼飞机不同,由4 个基本通道组成:①控制旋翼的纵向周期变距,以稳定与控制俯仰运动,并实现纵向速度控制;②控制旋翼的横向周期变距,以稳定与控制横滚运动,并实现侧向力控制;③控制尾桨桨距,实现航向稳定与控制;④控制旋翼总距及与其相协调的油门,实现高度控制。运输类旋翼航空器旋翼升力需求大,且一般采用大型球形柔性桨毂和大型桨叶,因而旋翼静态和动态操纵力矩比较大。因此,该类旋翼航空器的所有基本飞行控制都是采用液压助力方式。为了降低飞行员的操纵负荷,其均会采用功能完善且具有较大权限的自动飞行控制系统,目前飞行控制系统正朝着电传飞行控制系统方向发展。
运输类旋翼航空器适航规定[1](CCAR-29-R2)中飞行控制系统总则条款CCAR29.671 提出了以下总体适航要求:
(a)每个操纵机构和操纵系统必须操作简便、平稳和确切,并符合其功能;
(b)每个飞行操纵系统的每个元件必须在设计上采取措施或带有醒目的永久性标记,使能导致操纵系统功能不正常的任何装配错误的概率减至最小;
(c)必须提供手段以便在飞行前使所有主飞行操纵系统能在全行程内运动,或必须提供措施使飞行员在飞行前能认定整个操纵在全行程内是有效的。
上述规章条款缺乏细节的定性和定量准则,不便于在条款符合性设计或判断上具体应用。其相关指导材料也仅给出顶层指导,缺乏具有可操作性的具体实施建议,因此需要进一步将上述适航条款显性化。本文在充分研究分析国内外飞行控制系统适航标准和技术规范的基础上,结合国内型号研制和适航审定实践,对该适航规章条款进行显性化解析,给出定性和定量建议,同时也针对旋翼航空器电传飞行控制系统适航规章提出了前瞻性发展建议。
1 CCAR29.671(a)条款解析
CCAR29.671(a)条款规定:每个操纵机构和操纵系统必须操作简便、平稳和确切,并符合其功能。该条款要求操纵机构和操纵系统操作简单直接,飞行员的操纵动作与人的运动本能反应相一致;在操作过程中不会产生操纵力突变、卡滞等现象,杆力梯度合适,不会增加飞行员负担;系统能正确执行飞行员指令,操纵过程中能够实现预定功能,旋翼航空器能够对操纵输入产生正响应。
在表明本条款的符合性时,只要中国民用航空局(局方)的试飞员到被审定的运输类旋翼航空器上检查并试飞,认为各飞行控制系统安排合理、使用方便,给出满意的评语,本条款的符合性即可满足。但这样的符合性评估发生在审定试飞阶段时,如果评估不符合要求,申请人大多需要在硬件上做一定设计更改来满足要求,有可能耗费大量的时间和经费成本。因此有必要明确该条款的定性和定量要求,用于指导申请人在方案设计初期就能通过计算分析或试验来初步表明对适航条款的符合性,这也有利于支持局方开展符合性的前期判断。
1.1 简便要求
飞行控制系统操作简便一般指飞行员手、脚的操作动作与人的运动本能反应相一致。
1.1.1 周期变距杆
通过周期变距杆的移动可使航空器按飞行员运动本能所希望的方向做相应运动。当沿给定轴线施加操纵输入后,可能会存在一定量的耦合,这种耦合对飞行员不应是有害的。周期变距杆向前操纵,旋翼航空器的响应应是低头;周期变距杆向后操纵,旋翼航空器的响应应是抬头;周期变距杆向左操纵,旋翼航空器的响应应是旋翼左边朝下,增大向左地速或左加速基准;周期变距杆向右操纵,旋翼航空器的响应应是旋翼右边朝下,增大向右地速或右加速度基准。
1.1.2 总距操纵
通过总距杆的上下移动可使航空器在垂直平面内产生相应的相对运动,存在的耦合仍然对飞行员不应是有害的。应注意保证飞行员对总距运动的感觉处于垂直平面内,目的是要把总距运动同与航空器油门相关的运动做明显区分。总距杆往下操纵,减小总距;总距杆往上操纵,增大总距。
1.1.3 脚蹬
通过脚蹬前后移动可使航空器在水平平面内产生相应的相对转动,存在的耦合仍然对飞行员不应是有害的。飞行员向左操纵脚蹬,向左改变航向基准;飞行员向右操纵脚蹬,向右改变航向基准。
1.2 平稳要求
飞行控制系统操作平稳主要是对飞行控制系统操纵特性的要求。飞行控制系统操纵特性主要是指由其摩擦、预加载荷、空行程、刚度、质量不平衡、惯性、非线性传动和速率限制等机械特性引起的飞行员操纵感觉。
在任何正常的配平飞行时,俯仰、滚转和偏航操纵应具有正向回中能力。回中、启动力、稳定性和操纵力梯度的综合影响不应产生不适宜的飞行特性,也不允许操纵杆松浮时航空器显著偏离配平状态。启动力是指飞行中使操纵面开始运动所需的座舱操纵力,包括飞行控制系统的摩擦力和预加载荷等。
军用旋翼航空器飞行品质要求[3](ADS-33E)作为世界范围内应用最为广泛的旋翼航空器操纵品质标准,中国运输类旋翼航空器可以按照该标准提出飞行控制系统的定量平稳要求。如表1—表4 所示。
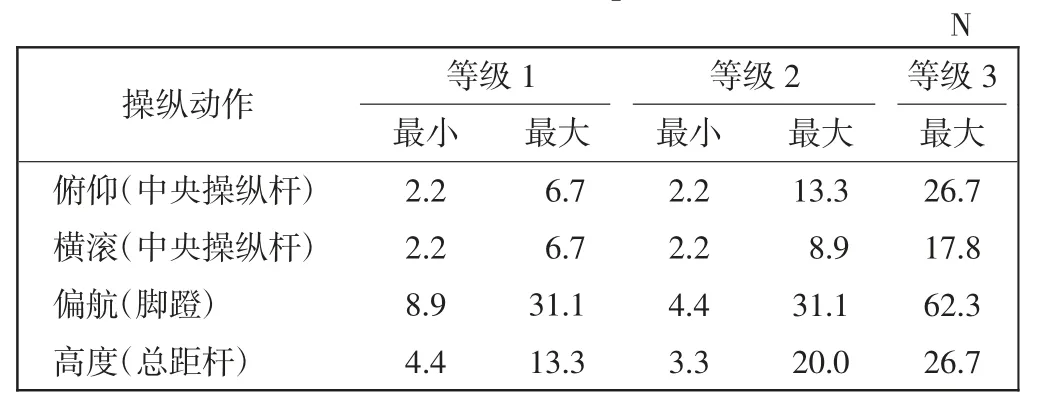
表1 悬停及低速启动力要求Tab.1 Allowable hover and low speed breakout forces
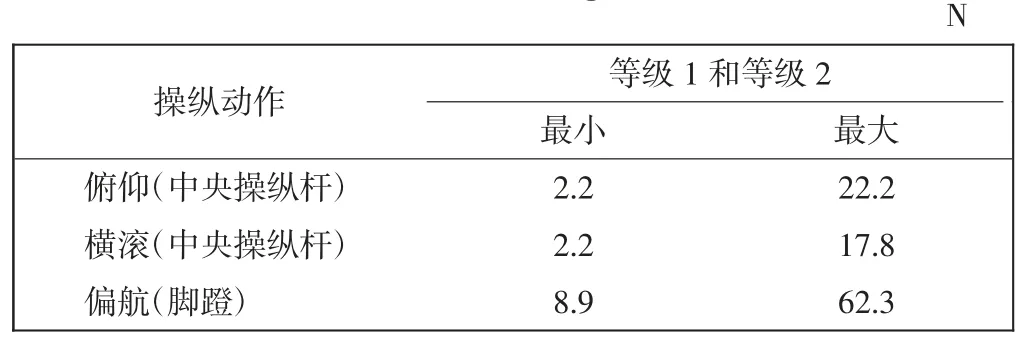
表2 前飞启动力要求Tab.2 Allowable forward flight breakout forces
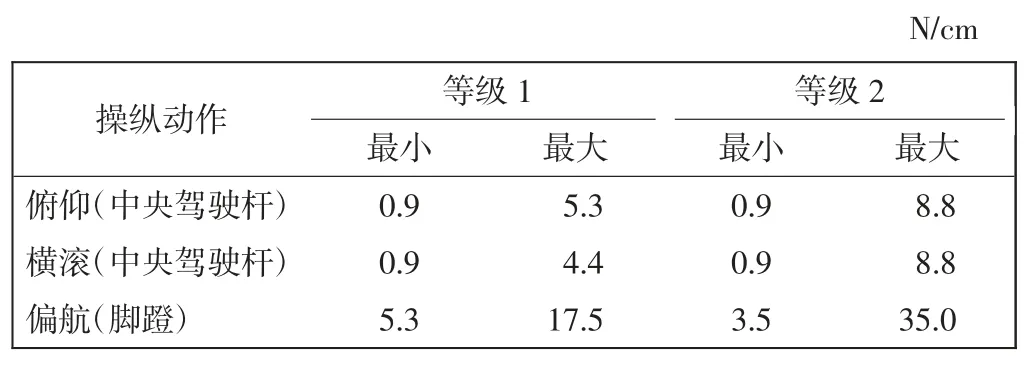
表3 操纵力梯度要求Tab.3 Allowable control force gradients
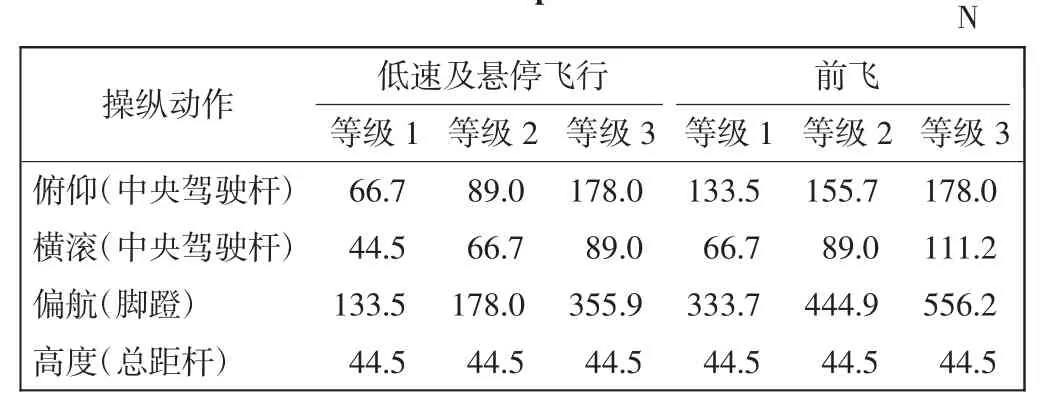
表4 座舱操纵力极限值Tab.4 Limit cockpit control forces
正常情况下悬停及低速飞行启动力的要求应在表1 规定的等级1 范围内,故障情况下可以降级到等级2 或等级3。正常情况下前飞启动力的要求应在表2 规定的等级1 范围内,故障情况下可以降级到等级2 或等级3。前飞启动力随飞行速度的变化应是适宜的。只要地面测得的前飞启动力与飞行中观察的结果定性一致,则地面测量得到的前飞启动力结果通常可以代替实际飞行测量结果。
在整个操纵行程范围中,正常情况下,俯仰、滚转和偏航操纵力梯度应在表3 所规定的等级1 范围内,故障情况下可以降级到等级2。此外,当有偏离配平位置2.54 cm 的操纵位移时,所选操纵力梯度产生的操纵力不应小于启动力。对于剩余的操纵行程,每2.54 cm行程中实际梯度的变化不应大于50%。高度方向的总距操纵杆的操纵力梯度最好为0,除非有自动油门功能,如接通了高度保持或有包线提示装置。
除非在特殊要求中另有规定,对于任何与任务—科目—单元相符的机动飞行,不经重新配平,正常情况下所需的最大操纵力不应超过表4 给出的等级1 数值。
最大操纵力一般可分为短期操纵力和长期操纵力。短期操纵力一般是指在飞行构型改变以及飞行条件正常改变期间保持期望飞行路径时,或者从故障中重新获取控制时,短时间内稳定的操纵力(不包括构型改变、飞行条件改变或故障恢复控制期间产生的瞬态峰值力)。对于短期操纵力,飞行员会立即采取行动,重新配平或改变飞行构型或改变飞行条件,以减少或消除操纵力,因此短期操纵力不会存在于任何主要飞行阶段间[4]。表4 规定的驾驶舱操纵力极限值就是短期操纵力。
长期操纵力是在正常或故障情况下,不容易配平或消除的操纵力。长期操纵力的极限操纵力可以参考正常类、实用类、特技类和通勤类飞机适航规定[4](CCAR-23-R3)第23.143 条的要求,即不超过下列限制:俯仰44.5 N,横滚22 N,偏航89 N;总距主要是前后和上下操纵,可以采用俯仰的要求。
1.3 确切要求
在所有飞行状态下,俯仰、滚转、偏航和总距操纵装置的灵敏度和梯度应和旋翼航空器的动态响应特性一致。在任何情况下,操纵装置的灵敏度或梯度不应产生不适宜、突然或迟缓的响应。
每个操纵装置的空行程会导致座舱操纵装置出现虽已运动,但还未驱动舵面产生适当力和力矩,因此该空行程不应引起不适宜的操纵效果。
俯仰、滚转、偏航和总距操纵装置的操纵力、位移和灵敏度应当相容,其响应应当协调。
对于所有的无加速飞行状态,将座舱操纵装置的操纵力配平至0 应是可能的。操纵力配平调零装置的运动不能使旋翼航空器的姿态或平移速度产生不适宜的变化。配平装置的操作无需异常低或异常高的力。对于配平操纵位置,配平器不会产生不良的杆跳、杆配平速率或杆滑动。
无论飞行员是否介入,旋翼航空器与操纵装置之间不应有动态耦合的倾向,尤其不允许发生飞行员一旦松开操纵装置就停止的低阻尼高频率振荡。
1.4 符合性方法
首先,通过设计构型文件的设计描述、飞行操纵力计算分析和全机操稳品质计算分析,以及系统数字模拟仿真分析和系统地面台架试验的仿真测试,证实飞行控制系统的飞行操纵满足简便、平稳和确切的要求。
其次,通过CCAR29.683 条款的操作试验和按照型号检查核准书(TIA,type inspection authorization)程序进行的局方飞行试验,证实操纵装置操作的简便性和平稳性。此外,应在申请人的科研飞行试验和局方的TIA 飞行试验期间,按照CCAR29.141—CCAR29.175条款的要求评定旋翼航空器对操纵输入的正响应,证实符合确切要求。
2 CCAR29.671(b)条款解析
2.1 防差错要求
防差错是一种消除错误的预防性技术和方法,以运输类旋翼航空器在设计、来料、加工、制造、装配、调试、飞行和维修等全过程(简称运输类旋翼航空器全寿命周期)中的差错为研究对象,从事前预防和风险管控的角度,在人、机、料、法、环等各方面,通过采用防差错装置(含限位、限动装置)、自动功能(含自动检测)、报警、标识、分类等有效手段,对运输类旋翼航空器全寿命周期工作过程进行重新规划和改进,使运输类旋翼航空器工作达到“零缺陷”状态,降低运输类旋翼航空器事故或灾难发生的可能性。因而,防差错方法须具有前瞻性、主动性、预防性、全面性和安全性等特点[5]。
本条规章主要是要求将飞行控制系统引起显著安全影响的不正确装配风险降到最低。显著安全影响一般是指异相动作、逆向操纵感觉、不期望的操纵交联和失去操纵功能。
防差错应尽可能做到防止工作过程或结果进入死角,或者防止不经意的人为疏忽导致错误,通常把这些方法称为“愚巧法”,具体含义包括:有人为疏忽也不会出错(不需要注意力);外行人来做也不会出错(不需要经验与直觉);不管是谁在何时工作或传递产品都不会出错(不需要专门知识与高度的技能)。因此,通常情况下只接受物理上的防差错手段,并需得到局方特别批准。
2.2 符合性方法
在开展系统安全性评估时,应充分考虑导致不正确装配的各种可能性。申请人应在设计流程中采取足够的预防措施,提供充分满足持续适航要求的相关操作程序,使飞行控制系统零部件生产和维护过程中(比如安装、连接或调整)不正确装配的风险最小化。一般应该开展如下工作。
评估飞行控制系统零部件不正确装配的潜在影响,判断相关故障情况的安全影响等级。当故障情况评估等级为灾难、危险或主要时,局方仅接受零部件物理上的设计预防手段来防止不正确的装配,除非申请人有充足的证据向局方表明上述设计预防是不切实际的。故障情况评估等级为微小或没有安全影响时,可以不采取物理防差错设计措施。
根据运输类旋翼航空器飞行控制系统的特点,一般较容易出现安装差错的类型[6]主要可以归纳为3类。
(1)系统中零部件本身安装方向的错误。飞行控制系统中的很多零部件特别是摇臂、支座类零部件,其外形上具有一定的对称性,但又存在功能上要求的安装方向性,因此在装配过程中极易装错且这种错误安装很难被及时发现,即使发现后也需要拆卸很多其他与之相连的零部件后才能进行重新安装,工作量非常大。
(2)同一型机上两个或几个相似零部件之间的错装。飞行控制系统中经常会出现外形和尺寸非常相似的部件,这类零部件在装配过程中经常出现误装,如孔径相同且力臂长度相近的摇臂类零部件以及长度相近的拉杆等。
(3)相似机型间相似零部件间的错装。不同机型的飞行控制系统中的某些零部件由于功能相似,或者某些关键部件的局部优化设计后的沿用,导致飞行控制系统不同机型间的相似零部件存在错误安装的可能,这也是在设计审查过程中需要特别注意的问题。
因此,防止不正确装配最好的方法是提供避免不正确装配出现的设计细节。可以采用物理上的典型设计细节,例如厚度不同的耳片、长度不同的元件或构型差别大的系统零部件,也可以使用醒目的永久性简单标记使本规则得到满足,比如永久性的(耐久的)“标贴”或模板,但这需要得到局方的特别批准。注意防差错不能通过构型控制来解决。防差错的方法可以采取完全对称设计、不对称安装设计、变截面尺寸、增加附加物和加大尺寸差异等方法。
在评审型号设计图样文件资料时,应根据上述要求和方法检查飞行控制系统的设计细节。在按CCAR 29.681 和CCAR29.683 进行验证静力试验和操作试验时,应根据可能出现不正确装配,以及为了满足本规章而提供的任何所需标记,对飞行控制系统的零部件开展彻底的审查[7]。
3 CCAR29.671(c)条款解析
3.1 行程检查要求
本条款要求在飞行前申请人必须有措施使飞行员对飞行操纵能否在全行程范围内运动进行确认,确保旋翼航空器在正常以及异常飞行情况下均能进行正常操纵,从而实现安全飞行或着陆。
如果没有完全的操纵权限,就可能存在总体操纵问题。这些问题在启动或大多数正常运营期间可能无法检测到。如果出现特殊飞行情况,如发动机故障、操纵困难或强风下的顺风悬停,可能需要使用完全操纵权限。因此对飞行员来说,在飞行前验证完全可用的操纵权限是至关重要的。
运输类旋翼航空器一般需要采用液压助力飞行控制系统。在发动机启动和旋翼转动前,主液压系统是没有办法为飞行控制提供液压动力的。在没有液压动力的情况下,飞行员在飞行前检查和操纵旋翼是无法实现的。一旦旋翼转动起来,飞行员就可以检查飞行控制,但只能在较小的动作范围内进行。这是因为此时整个行程的操纵将导致旋翼下挥限动器遭受撞击,甚至导致旋翼航空器地面翻转毁坏。小的操纵移动具有局限性,只能实现检查操纵移动方向的正确性,而不能实现完全操纵权限的检查。
由于运输类旋翼航空器具有的较高安全级别,因此特别在该类旋翼航空器规章中提出本条安全要求。这个规则要求运输类旋翼航空器的设计应能使飞行员在飞行前验证操纵权限。
3.2 符合性方法
对于运输类旋翼航空器带动力或助力的飞行控制系统,必须提供额外的设计措施来帮助实现飞行控制系统全行程运动范围检查。在飞行前通过对地面电源或机上蓄电池、机上电动泵、起动辅助液压系统为舵机和主、尾作动器供压,使飞行员可以操纵驾驶舱内的操纵机构在全行程范围内运动,以检查飞行控制系统是否在全行程范围工作正常。
4 适航规章修订建议
传统运输类旋翼航空器飞行控制系统使用机械部件(拉杆、摇臂)传递指令。当代运输类旋翼航空器飞行控制系统正朝电传飞行控制系统发展。与传统机械飞行控制系统相比,电传飞行控制系统采用了大量电子电气部件替代机械部件,将自动飞行的功能提升为全权限。采用电传飞行控制系统的BELL-525 直升机制定了操纵余量感知[8]和模式通告[9]的专用条件,并且欧洲航空安全局(EASA,European Union Aviation Safety Agency)已将这两个适航要求作为(e)和(f)条款加到了CS 25.671 中。因此,为满足旋翼航空器电传飞行控制系统适航审定需求,将来可以考虑在飞行控制系统总则条款中阶段性引入操纵余量感知和模式通告方面的适应性要求[10]。
4.1 操纵余量感知
建议引入的要求为“系统设计必须保证,无论主飞行控制以任何方式接近操纵权限边界时,飞行员都可获得适当的感知”。
当前,CCAR-29-R2 规章不包含用于电传飞行控制系统操纵余量感知方面的内容。旋翼航空器操纵性和机动性适航要求包含在CCAR 29.143 内。除了操纵余量外,这些操纵性要求与大多数电传飞行控制系统相协调,大多数机动性要求不受电传飞行控制系统影响。适航规章目的是确保操纵余量(在旋翼和反扭矩系统层级)在定义的飞行包线内是足够的,以避免失去操纵(是指旋翼航空器有足够操纵能力,使飞行员能改出潜在危险飞行情况)。这个目的内涵是为飞行员提供接近操纵极限的充足感知。对于运输类旋翼航空器传统的机械液压飞行控制系统来说,CCAR29.143是强调飞行员通过其周期变距杆和脚蹬相对于座舱操纵限动器的位置来感知舵面的操纵余量。
因为电传飞行控制系统的操纵装置与舵面之间没有机械连接,不存在杆舵对应,飞行员无法通过操纵装置的位置来感知舵面位置,所以上述规章不适合作为电传飞行控制系统感知舵面操纵余量的适航要求。由于没有座舱操纵与主、尾桨作动位置之间的持续相关性,对于所有飞行情况,飞行控制系统无法通过操纵位置物理限动或限制相关的座舱操纵位置,为飞行员提供操纵余量反馈的触觉提示。
因此,适航规章需要提出最低安全标准的补充要求,以保证在接近主、尾桨舵面操纵极限时,为运输类旋翼航空器飞行员提供感知。也就是说,系统设计必须保证无论主飞行控制以任何方式接近操纵权限边界时,飞行员都能获得适当的感知。该建议的规章要求,当飞行员使用到全部飞行操纵权限时,应该给其提示。该提示应考虑为了实现极限飞行性能,操纵舵面达到饱和状态的飞行指令需求。
此外,针对已知和未知飞行操纵限制情况且功能简单的告警系统,应正确平衡警告的感知需求和避免过度干扰,并通过正确设置告警门限来最小化过度警告发生的可能性。
申请人可自主选择合适的操纵权限提示,可以包括驾驶舱操纵位置、信号灯或者舵面指示。在要求实施飞行操纵权限限制时,没有必要限制单个舵面行程。
4.2 模式通告
建议引入的要求为“必须提供一种方法,以将能够显著改变或降级旋翼航空器操纵品质或工作特性的任一模式通知给飞行机组人员”。
运输旋翼航空器电传飞行控制系统一般具有多种工作模式,不受限于打开和关闭的限制。申请人应评估不同工作模式及其之间的瞬态,以查清其是否能凭直觉感知。如果这些模式或其之间的瞬态是非直觉能感知的,那就需要向飞行机组提供告警。任何告警必须符合CCAR29.1322 的要求,包括通知飞行机组失去保护的提示。
5 结语
本文通过定性和定量地解析旋翼航空器适航规章条款CCAR29.671 的适航要求和符合性方法,在电传飞行控制方面对相关内容进行了延伸扩展,使得该规章条款得到了一定程度的显性化。一方面为传统飞行控制系统适航审定提供了实际的操作参考,另一方面给出了飞行控制系统适航审定朝电传飞行控制方向发展的建议。本文成果可以用于局方和申请人开展运输类旋翼航空器飞行控制系统适航审定具体实践,提高审定效率,也可为开展面向飞行控制系统技术发展的适航审定研究提供参考。
猜你喜欢
装备环境工程(2022年9期)2022-10-13 05:23:34
学习周报·教与学(2020年25期)2020-10-21 11:00:28
大众科学·中旬(2020年6期)2020-06-29 07:27:36
山东工会论坛(2020年3期)2020-06-10 13:50:44
航空兵器(2020年6期)2020-01-25 16:23:16
智富时代(2019年9期)2019-11-27 11:44:06
法律方法(2019年1期)2019-05-21 01:04:10
中学生数理化·中考版(2018年10期)2018-12-07 00:44:56
理科考试研究·高中(2017年7期)2017-11-04 17:31:35
科技风(2017年21期)2017-05-30 21:23:34