
卫星用步进电机性能一致性分析及控制策略研究
2023-05-30 10:48:04任泽宇罗莉石宏顺班解进
机电信息 2023年10期
关键词:步进电机
任泽宇 罗莉 石宏顺 班解进
摘要:对卫星用步进电机工作原理和结构特点进行了阐述。以某步进电机模型为基础,分析不同材料性能差异、加工尺寸偏差对步进电机性能一致性的影响,并提出对应控制策略。按控制策略执行并对比无控制策略电机性能偏差,验证了一致性控制方案的可行性。
关键词:步进电机;性能一致性分析;偏差控制
中图分类号:TM383.6 文献标志码:A 文章编号:1671-0797(2023)10-0005-05
DOI:10.19514/j.cnki.cn32-1628/tm.2023.10.002
0 引言
隨着卫星数据通信业务需求的不断增长,单颗卫星工作模式已难以满足使用需求,因此,多颗卫星互联网已成为通信服务未来发展的趋势。随着我国航天事业迅速发展,国产卫星组网也在高速实施。步进电机是卫星运动机构执行单元应用最为广泛的电机类型,其将电能转换为机械能,相比传统电机具有动态响应快、控制简单、易于启停和反转、定位自锁、无累积运行误差、可靠性高等优点[1],广泛应用于卫星天线、转台、光学仪器等分系统。空间卫星的高速发展,对步进电机的需求潜力是巨大的。
步进电机的研制必须适应空间卫星的发展,需适应小批量的研发路线,为此,需对空间卫星用步进电机的性能一致性进行研究分析,保证在研制过程中实现性能参数超差可控。
1 混合式步进电机工作原理
步进电机一般分为反应式、永磁式和混合式,混合式步进电机结合了永磁式和反应式的优点,步距角小,定位精度高,同时噪声小,是卫星环境常用的一种类型。
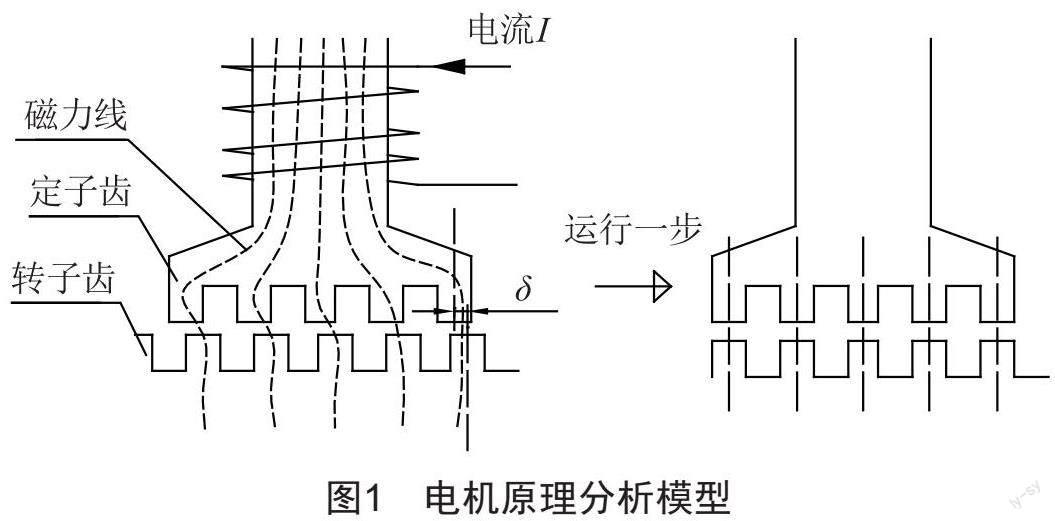
混合式步进电机的运行原理是通过定子磁极与转子进行能量转换,是转子步进式旋转。一般混合式步进电机定子含偶数个大齿,转子上位于永磁体两侧的磁极分别显现N和S极,同时两块磁极上开有小齿且相互交错半个齿距。当电机一相通电时,某个定子齿呈N极,则对一侧磁极排斥,另一侧磁极吸引,两者合力将转子拉向左运行一步,如图1所示,当电机另一相通电时,其他定子齿同样会驱动转子运行一步。根据供电方式不同,电机步进角度也不同,运行4拍转过一个齿距角,这样的运行模式叫做整步模式,要是将单相供电和两相供电方式合并起来作为一个整体,这样便又形成了新的供电模式,一般称为半步方式,两相电机半步供电方式为:A-AB`-B`-A`B`-A`-A`B-B-AB[2]。
2 步进电机结构设计
步进电机基本结构与大多数无刷电机类似,均由定子、转子两部分构成,但由于步进电机运行原理较为特殊,电磁结构和其他电机有着较大差异。
2.1 定子设计
定子主要包括绕组和铁芯,槽绝缘及安装线,随着步进电机加工方法不断进步,同时为适应短周期研制的需求,在空间卫星的使用场景下多数采用半自动绕线技术,槽绝缘为非金属骨架或者耐辐照绝缘纸等可自成型的材料,可大幅降低人力消耗和时间成本。
定子铁芯为导磁结构,步进电机气隙小,因此在定子铁芯中磁密度较高,通常采用一些具备高导磁性能的材料如软磁合金1J22、电工钢带叠片等。
2.2 转子设计
转子主要由金属轴、磁极和永磁体构成,通常转子磁极数为2,永磁体数量为1,为了追求更大的力矩输出性能也可调整为4,对应的永磁体数量为2。转子磁极带有小齿,根据实际使用步距角精度需求可做调整。步距角θb还与电机输入脉冲电信号的导通方式有关。
θb=360°/ZRN
式中:ZR为转子齿数;N为电机通电拍数。
如电机转子齿数为50,通电方式为两相四拍,则该电机步距角为1.8°。由此可知,为了提高运行分辨率,减小步距角,可增加通电拍数和增大转子齿数。转子磁极材料同样需要满足高磁饱和性能,因此可采用软磁合金或电工纯铁DT4等材料。
3 性能一致性分析
依据常规空间环境需求及结构设计原则,参考空间卫星产品J45系列步进电机,建立理论设计模型,主要设计参数如表1所示。
通过ANSYS工具软件对模型进行保持力矩仿真测算,幅值约为0.278 N·m,如图2所示。
通常在电磁设计时,为了简化设计分析,将参数设定为定值进行仿真计算,这是一种理论值状态的设计方案。实际上由于机械加工尺寸存在一定范围的偏差,软磁材料性能也同样存在波动,电机的性能一致性得不到较好的保障。以保持力矩作为指标参考,分析不同情况下尺寸和材料性能偏差对电机输出一致性的影响,同时给出对应控制策略。
3.1 气隙偏差影响及控制策略
该电机模型中气隙理论值为0.05 mm(单边),取气隙偏差范围0.035~0.065 mm进行保持力矩输出计算,结果如表2和图3所示。根据计算结果来看,由于步进电机气隙设计值通常较小,气隙尺寸偏差对性能影响显著,因此对步进电机气隙的控制极其重要。
与理论保持力矩值对比,在气隙尺寸位于上差范围时偏差值较小,气隙尺寸可通过对电机定子内孔及转子外径尺寸进行限定,以此达到控制气隙尺寸范围的目的。考虑到实际加工工艺难度及设计余量,对步进电机气隙应采取范围控制于0.05~0.057 5 mm的措施,最大不一致偏差为2.83%。
3.2 转子偏心影响及控制策略
该电机模型中转子理论偏心为0 mm,该影响因素主要取决于加工精度和装配精度,根据电机尺寸取偏心量为0~0.02 mm进行保持力矩输出计算,结果如表3和图4所示,根据结果来看,电机转子偏心对电机输出性能影响较小。
转子偏心情况可通过对装配零件同轴度的限定来调整,鉴于该因素对电机输出性能影响较小,同时步进电机定子内孔同轴度难以精确保证,因此对步进电机转子偏心情况采取控制定子装配同轴度为?准0.01 mm,转子磁极装配同轴度为?准0.005 mm的措施,电机单边偏心量在0~0.007 5 mm范围内,最大不一致偏差不大于0.31%。
3.3 定子齿宽偏差影响及控制策略
該设计模型定子齿宽为0.55 mm,定子采用叠片方式加工,尺寸受到定位精度及冲压(电切割)精度影响,取0.5~0.6 mm范围进行分析,结果如表4和图5所示。通过齿宽对性能偏差的影响可以看出,实际尺寸位于上差或下差对电机性能影响差别不大。
定子齿宽的尺寸偏差是由加工导致,因此可控制尺寸范围在0.52~0.55 mm,最大不一致偏差不大于2.30%。
3.4 转子齿宽偏差影响及控制策略
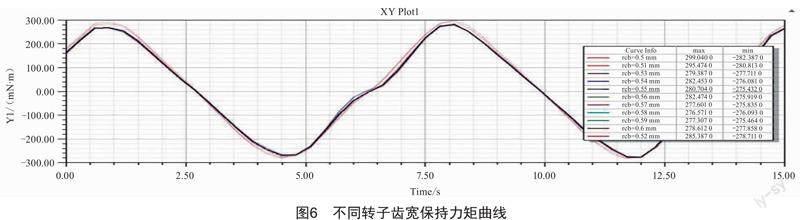
设计模型中转子齿宽为0.55 mm,依旧选取波动范围0.5~0.6 mm进行仿真分析,结果如表5和图6所示。可以看出转子齿宽越小,输出力矩偏差越大,因此在电机转子设计时可采取限制公差0.54~0.56 mm的控制策略,保持力矩理论偏差不大于0.43%。
3.5 软磁材料性能偏差影响及控制策略
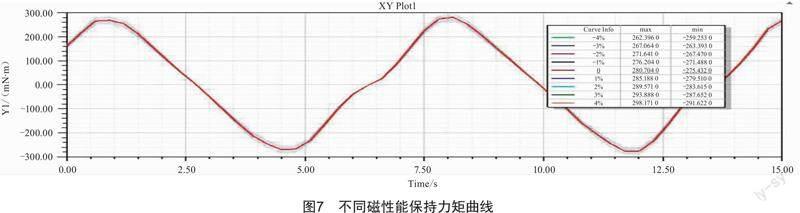
本次设计模型中电机定子软磁材料选用电工钢带(牌号50WW600),考虑到冲压过程对材料性能的影响以及材料本身性能差异,对仿真模型中软磁材料的磁感应强度B做不同程度的偏移,以此模拟软磁材料性能差异对电机输出的影响。取模型中软磁材料磁性能B-H曲线偏移±4%,结果如表6和图7所示。可以看出材料磁性能对电机输出偏差的影响较大,因此研制过程中应要求控制材料磁性能偏差在±1%范围内,同时尽量采用同一批次材料进行加工,理论保持力矩偏差不大于3.06%。
3.6 小结
针对基于空间卫星产品J45系列步进电机建立的理论模型,对一致性偏差造成影响的包括气隙、转子偏心、定子齿、转子齿以及软磁材料性能偏差等几种原因。如表7所示,经采用对应控制策略可将性能一致性偏差程度降低,累计偏差不大于8.93%,较J45基础型最大不一致性减小了55.8%,理论分析结果较为显著。
4 试验分析
为了达到论证目的,抽取基础产品J45步进电机5台测试性能一致性,与理论模型相对应,参考的性能指标为保持力矩;另一方面按照上述控制策略研制5套J45A改型步进电机,电机实物如图8所示。对比分析该指标一致性控制方法的可行性和正确性。
在常温常压环境下,电机两相绕组同时通入直流0.8 A电流,分别测试J45及J45A改型步进电机保持力矩大小如表8所示。
由表中数据计算在该指标参数的一致性偏差情况,J45基础型偏差为12.82%,J45A改型为5.80%,整体指标优化程度达到54.7%。另外可以发现,数据采集的基数较小会对最大偏差结果有一定影响,但整体趋势基本与理论分析相符。因此,在步进电机设计过程中采取上述控制策略能够降低电机性能偏差,提高电机批次一致性。
5 结语
本文针对空间卫星用步进电机的性能一致性影响因素进行了研究,通过对加工制造过程控制的理论分析和实际优化设计,得出如下结论:加工制造过程所导致的尺寸偏差和材料性能偏差会影响步进电机输出性能一致性,采用对气隙、转子偏心、定子齿宽、转子齿宽以及软磁材料性能的控制策略,理论上对电机性能一致性提升效果显著;通过控制策略的实施对电机进行设计优化,并抽样测试,结果与理论分析相符,整体一致性指标优化程度达到50%以上,控制策略有效。
[参考文献]
[1] 谢辉,唐勇.步进电机发展回顾与前景展望[J].重庆三峡学院学报,2010,26(3):110-113.
[2] 余逸风.二相混合式步进电机细分控制技术研究及驱动器的设计[D].柳州:广西科技大学,2015.
收稿日期:2023-01-16
作者简介:任泽宇(1996—),男,贵州人,工程师,研究方向:电机设计。
猜你喜欢
山东工业技术(2016年24期)2017-01-12 09:31:47
科学家(2016年3期)2016-12-30 00:32:48
电子技术与软件工程(2016年22期)2016-12-26 12:46:20
电子技术与软件工程(2016年19期)2016-12-19 18:27:00
科技视界(2016年24期)2016-10-11 12:44:53
科技视界(2016年15期)2016-06-30 16:31:32
电脑知识与技术(2016年12期)2016-06-14 01:40:14
电脑知识与技术(2016年7期)2016-05-19 13:39:34
科技视界(2016年7期)2016-04-01 11:38:06
教育教学论坛(2015年51期)2015-12-15 10:08:29
