基于四轴巡检无人机的道路监控系统设计
2023-05-29 05:50:58撒浩杰齐志媛周雅雯高宏伟
电子制作 2023年7期
撒浩杰,齐志媛,周雅雯,高宏伟
(沈阳理工大学 自动化与电气工程学院,辽宁沈阳,110159)
近年来道路中经常会出现由于车流量过大而产生交通堵塞的问题。一旦出现紧急突发情况时需要车辆人员的出动去解决事件,如果这时道路上出现交通堵塞现象,车辆可能无法准时到达现场。这就错使紧急情况无法在第一时间得到解决,进而导致无法估量的损失。
Normark Daniel 提到[1]:在上世纪60 年代,国外为了解决不断恶化的交通状况,开始研究并提出了智能交通系统(ITS)该系统,该系统将先进信息技术、通讯技术、计算机技术、传感技术、控制技术等多个技术融合在一起组成整个交通运输管理系统。而这项项目被许多发达国家争先恐后地进行投资并研究。但由于其具高昂的传感设备成本导致无法批量生产并部署与交通道路中,导致信息采集点少,无法动态地、全局地巡查路况。
近年来,随着我国国民经济的发展,车辆的数量在日益增加,为了能及时了解路况,我们利用安装大规模的摄像头来形成道路监控系统,但由于摄像头的监控范围受限,导致无法判断视野盲区中的路况。
为了解决以上两个问题,设计了一款四轴巡检无人机的基于道路监控系统,相比于传统的道路监控系统它更具有灵活性,能精确选择视野范围,用于实时观察路况,识别道路中的车辆和行人,在出现紧急突发情况时能判断路况的好坏,寻找最佳道路,减少车辆在道路中的行驶时间,使突发事件达到最佳解决效果。
随着无人机技术[2]的迅速发展,在姿态控制和稳定性两方面有了较好的效果,目前无人机姿态控制主要是收集陀螺仪数据和气压计数据,通过PID 算法对无人机实现了定高定点的稳定控制,在控制中,要保证陀螺仪和气压计数据的稳定性及反馈的及时性,这样可以确保无人机控制效果的稳定并做出快速反应。目前陀螺仪的数据解算主要包括DMP、四元数[3]和卡尔曼解算[4]。DMP 数据虽然稳定准确但耗费时间长;卡尔曼解算虽用时短,但每次只能解算一个轴的数据;四元数解算虽然比卡尔曼解算用时稍多,但是一次可以解算出三轴的数据。在无人机飞行检测中,由于使用的是微处理器,我们需要将线下训练的模型文件加载到微处理器中,实现线上检测。知识蒸馏的概念中,通过引入与教师网络有关的软目标作为Total loss 的一部分,以引导学生网络进行训练,实现知识迁移。
本文主要是通过四元数解算陀螺仪数据并反馈给微处理器后,通过PID 算法对无人机进行姿态控制,我们利用知识蒸馏模式将航空训练集的大量数据进行训练,减轻了训练的负担,并简易地完成了训练目标,从而实现无人机能够在道路中稳定飞行并且实现监控功能。
1 系统设计总体
本系统包含动力系统,ARM,信息采集系统,电源管理这四部分,其中信息采集系统包含摄像头模块,GPS 模块,MPU6050,NRF2401 主要是对信息进行采集。在系统中,电源管理模块主要承担动力执行单元、智能控制单元的和信息采集系统的供电,使其能正常工作智能控制单元和信息采集单元系统是相互的,ARM 既控制信息采集系统,又能收集它的信息。将收集的信息在ARM 中进行处理,将GPS,MPU 数据作为控制无人机姿态控制PID 的输入参数,进而通过ARM 去控制动力执行单元。使其无人机能正常飞行和定点悬停。通过信息采集单元的摄像头头数据在ARM进行处理并识别。系统框图如图1 所示。

图1 系统框图
PID[5,6]作为现在最主流的闭环控制算法,它的的原理简单,实现方便,适应性比较好能快速,准确的使系统达到稳定状态。PID 控制系统框图如图2 所示。
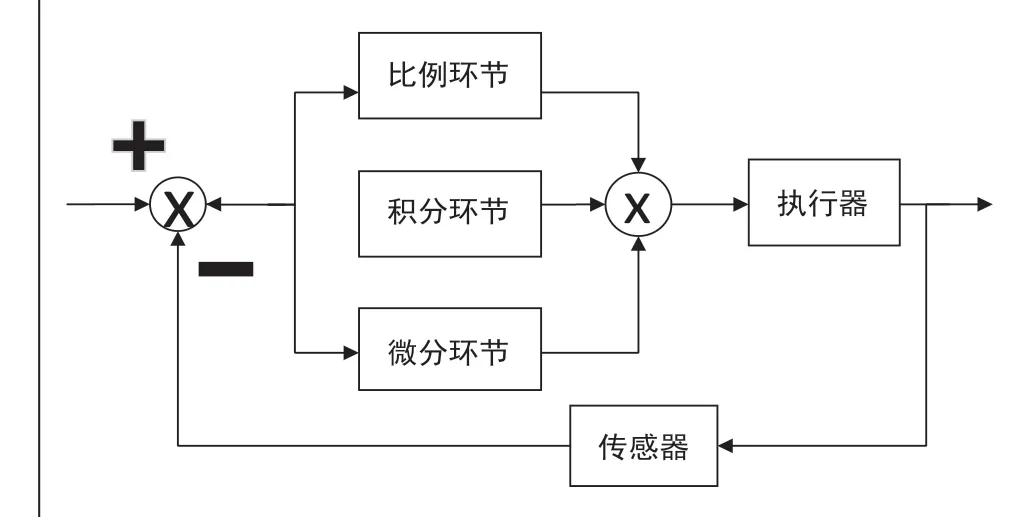
图2 PID 控制系统框图
四旋翼无人机[7]应用场景日益广泛。常用于航拍、摄像,农业灌溉等场景。但是由于在飞行过程中受到风等一些不可控因素的影响,使得无人机稳定性变差。而PID 可以去解决这个问题。目前PID 主要有两大种类,增量式PID 和位置式PID。在四轴无人机中我们需要三个串级PID,去保证姿态的稳定。在串级PID 的外环的真实值分别IMU 解算三轴PITCH、ROLL、YAW 的角度。用位置式PID 去调节。而内环的真实值分别为IMU 三轴的角速度,用增量式去调节。
即PID 控制器,连续的控制方程如式(1)所示:
err(t)为偏差量。
由于ARM 处理是数字量,所以将控制方程离散化如式(2)所示:
在外环中u(k)的输出量为外环的设定值。外外环中u(k)的输出量为为四个电机PWM 值。图3 为四轴姿态控制串级PID 控制系统框图。

图3 四轴姿态控制串级PID 控制系统框图
2 系统硬件设计
2.1 最小系统设计
最小系统版包含SSD203D 芯片,复位电路,振荡电路,SWD 下载这四部分,其 中SSD203D 芯 片,具 有Cortex—A7[8,9]内核,其特性和功能如表1 所示。其使用SWD 的下载方式,它的下载速度不仅和JTAG 下载方式一样,并且调试的过程中需要的线序很少。其中复位电路的原理是当微处理器(MCU)中RST 引脚收到一个电平信号并且时间大于2μs,即为微处理器(MCU)的复位,当复位键被按下时,这时候电容会处于短路中,同时释放出所有的电能。振荡电路主要提供一个8MHz 的晶振。电路的输入电压为24V。最小系统的原理图如图4 所示。

表1 SSD203D的电气特性表
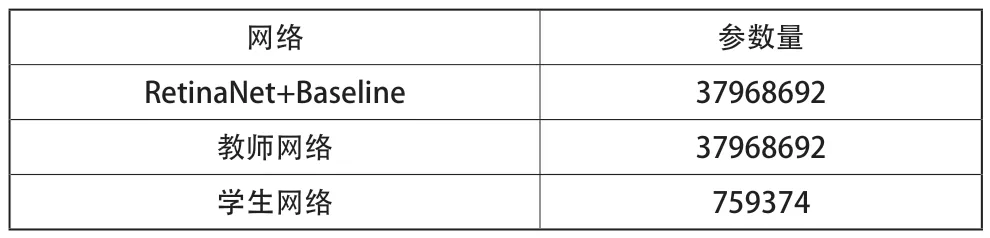
表2 参数对比表
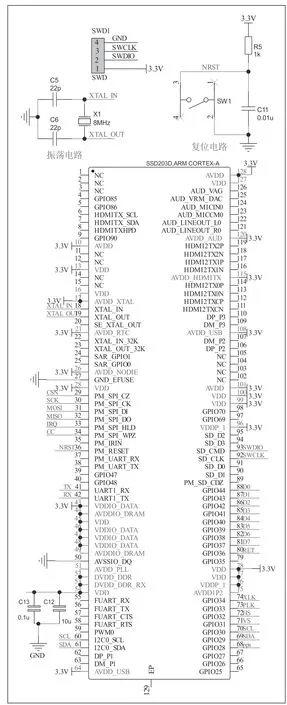
图4 最小系统原理图
2.2 电源模块
在现有的电路中包含线性稳压,电荷泵,开关电源[10],其中线性稳压电路具有变换效率较低,尤其是在输入输出电压差较大的情况下。当输出电流较大时,有明显的发热现象,甚至可能烧坏稳压器。该电源具有输出纹波电压高、噪声大、电压调整率差的特点,特别是给模拟电路供电时。电荷泵电路很难大功率。电容是串联放电,纹波大的弊端。
本电路采用开关电源DC-DC buck 电路,采用TPS5430DDAR[11]芯片将外接电源24V 将到5V。该芯片具有高电流输出,最大4A,5.5~36V 高速电压输入,高效转换,最大可降至95%,输出功率1.221V,具有过流保护和热关断的特点。在电路中输出如式(3)所示。
即电路中R1=R9,R2=R10。之后将输出的5V 通过AMS1117 稳压芯片将电路到3.3V。该芯片为低漏失电压调节器,稳压调节管由一个管构成,漏损电压的定义如式(4)。
提供电流限制和热保护,以防环境温度造成过高的结晶。电路C10 和C8 为输出滤波电容器,作用为抑制自激振荡。如果这两个电容断开,线性调节器的输出通常是振荡波形。C7 和C9 是输入电容。对于交流电压整流输入,它们的首要作用是将单向脉动电压转换成DC 电压。在这个图中,输入已经是5V 的DC电源,它们的作用是防止断电后电压反转,所以输入电容的容量往往大于输出电容的容量。原理图如图5所示。
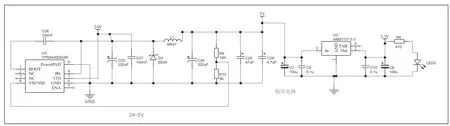
图5 降压电路图
2.3 GPS
GPS 采用ATGM336H 模块,此模块支持北斗/GPS/GLONASS 卫星系统,并可以3.3V 和5V 供电。板载可充电电子,可加速热启动搜星过程。其默认波特率为9600,可自行设置。具有高灵敏度、低功耗、低成本的特点。其电路图如图6 所示。

图6 GPS 电路图
2.4 MPU6050
MPU6050 是一个六轴传感器,采用I2C 获取原始数据加速度和角速度。自带1024 字节的FIFO,有助于降低系统功耗。I2C 通信高达400kHz。去除加速度与陀螺仪轴之间的敏感性,减少设置和传感器漂移的影响。工作电流为5mA,待机电流为5μA,加速度工作电流为500μA。其电路图如图7 所示。
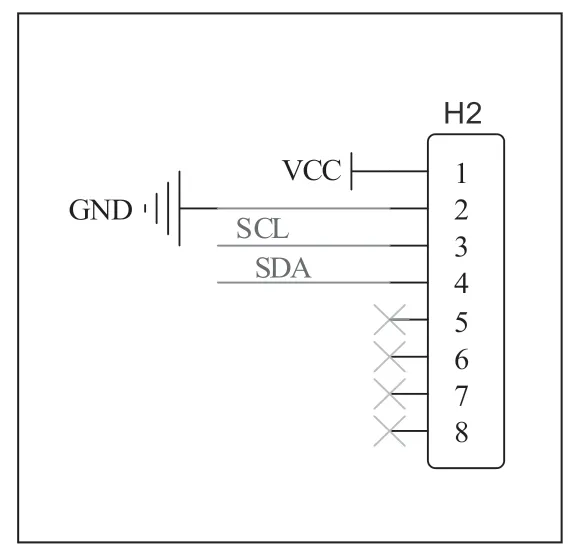
图7 MPU6050 电路图
2.5 摄像头模块
摄像头模块(ov7670)是一款图像传感器,具有体积小,自带感红外镜头,色彩鲜艳,可自动对焦,高灵敏度、工作电压低,ov7670 是基于SCCB 总线控制,SCCB 总线的控制方法和I2C 总线基本相似,因此控制起来也比较简单,可以输入整帧、子采样、取窗口等方式的各种分辨率8 位影像数据。其电路图如图8 所示。

图8 摄像头模块电路图
2.6 NRF2401 模块
NRF24L01 是由NORDIC 生产工作,其采用SPI 通信,可以很方便的连接到MCU 上面。2.4G 全球开放的ISM 频段,免许可证使用。最高工作速率2Mbps,高校的GFSK 调制,抗干扰能力强。126 个可选的频道,满足多点通信和调频通信的需要。内置CRC 检错和点对多点的通信地址控制。可设置自动应答,确保数据可靠传输。其电路图如图9 所示。
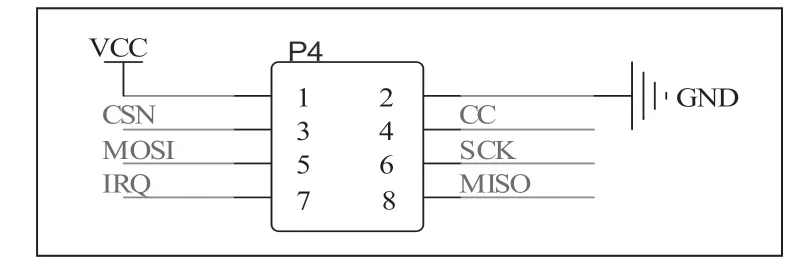
图9 NRF2401 电路图
3 模型设计
3.1 知识蒸馏
知识蒸馏[12](Knowledge Distillation)是一种压缩模型常用方法之一,不同于模型压缩中的剪枝[13]和权值量化,知识蒸馏是通过构建一个轻易化小模型,利用性能较好的大模型的监督信息来训练小模型,以达到更好地性能和效果。
知识蒸馏可分为离线蒸馏、半监督蒸馏、自监督蒸馏。本次设计我们利用离线蒸馏的方法进行模型的训练即传统的知识蒸馏。知识蒸馏,采用Teacher-Student 模型。如图10 所示为离线蒸馏的网络结构图。
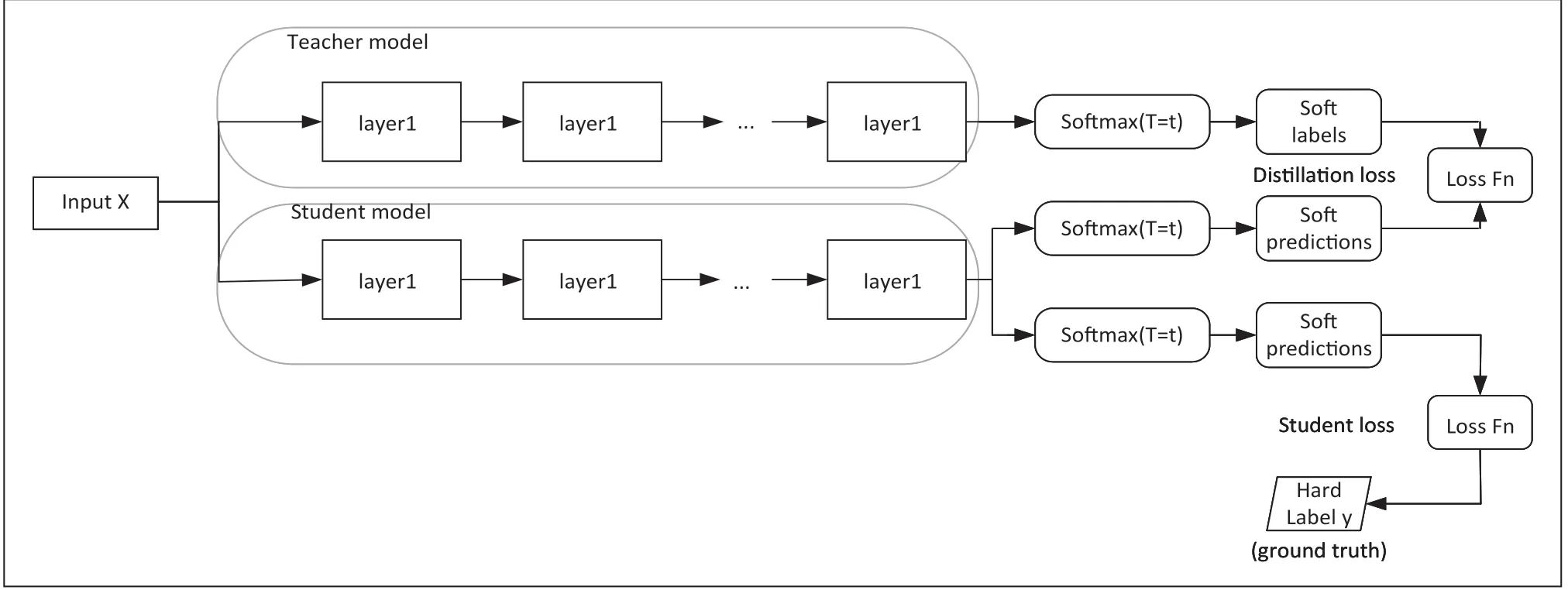
图10 离线蒸馏的网络结构图
3.2 教师网络
RetinaNet[14]模型:RetinaNet 以ResNet[15]为特征提取网络,通过FPN 进行特征融合并输出不同尺度的特征图进行分类和边界框回归。RetinaNet 模型如图11 所示。
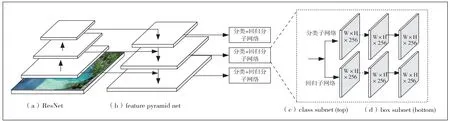
图11 RetinaNet 模型结构图
3.2.1 特征提取网络
RetinaNet 一般以FPN[16]作为特征提取网络,FPN 不仅加深了网络的结构,而且引入残差结构解决了梯度消失等问题。普通卷积层与残差卷积层的对比如图12 所示。
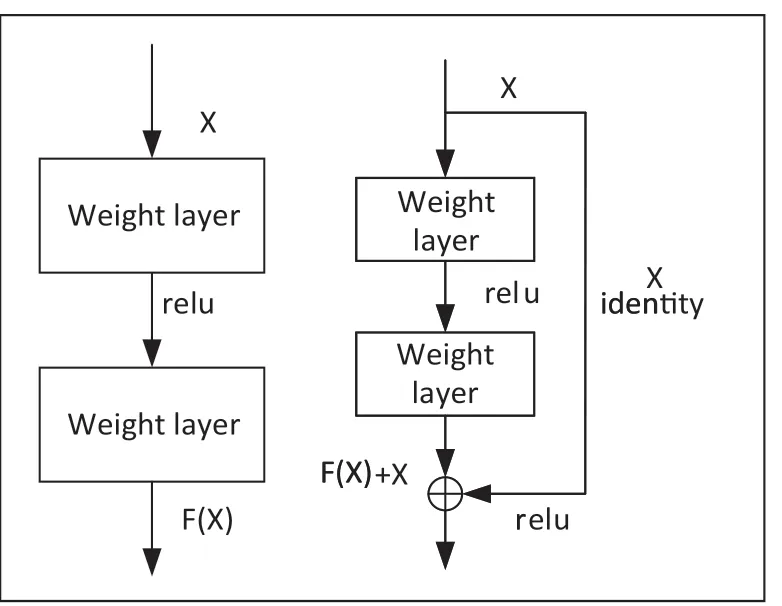
图12 普通卷积层与残差卷积层
即把F(X)改为F(X)+X,由公式(5)可知,在进行反向传播时,残差结构可解决梯度消失问题。
3.2.2 特征融合网络
RetinaNet 以FPN 作为特征融合网络,FPN 的网络本质上也是一个全卷积网络结构[17],FPN 构造特征包括自下而上,自上而下以及横向连接三个过程,自下而上即卷积网络向前传播的过程,自上而下的过程实质上是通过把上层的特征进行尺度变换。来构造新的特征图。在尺度相同的前提下进行同层连接融合特征。
如图13 所示为特征金字塔[18]的横向连接结构图。
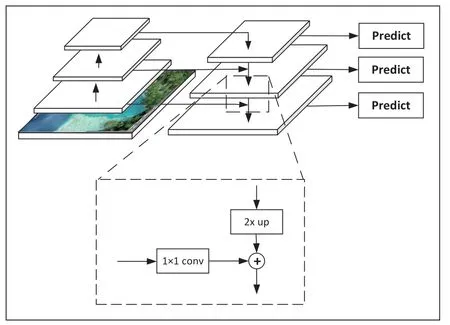
图13 特征金字塔横向连接结构图
3.2.3 损失函数
(1)分类损失
RetinaNet 以Focal Loss[19]作为分类损失,Focal Loss是用来代替无法抗衡该问题的交叉熵损失。如下式(6)所示。
如下式(7)所示。
其中tα为权重系数,γ为调制系数 。
(2)回归损失
RetinaNet 以 SmoothL1 作为回归损失,如下式(8)所示,其对离群点,异常值不敏感 ,梯度变化相对较小。
其中X是预测框与真实框之间逐元系的差距。
3.3 学生网络
知识蒸馏作为轻化网络常用方法,最早被用于分类任务中,但在目标检测任务中,已含两个阶段:分类和回归。因此在对RetinaNet 检测器做知识蒸馏也应包含两个阶段,即先进行分类蒸馏,再进行回归蒸馏。
在分类过程中,我们主要是将卷积的深度,即通过channel 维度的调整进行网络的调整。具体为将channel维度进行类别数的倍数的减少(向下取卷),从而实现参数量的减少,以便搭载微处理器(MCU)。
3.3.1 高温蒸馏过程
目标函数由distill loss(soft target) 和student loss(hard target)加权得到。
而其中用Net-T 产生的softmax distribution 作为soft target。Net-S 在 相 同 温 度 下 的soft target 的cross entropy 为Loss 函数的第一部分Lsoft。
Net-S 在温度T=1 下的softmax 输出和groud truth的cross entropy 为Loss 函数的第二部分Lhard,其作用为防止Net-T 出现错误,而使用ground truth 可以有效地较小对Net-s 传播的错误率。
温度系数T:温度的高低改变的是Net-S 训练过程中对负标签的关注程度。温度系数T 的产生可以高效的进行知识迁移:使用softmax 层输出的概率作为软目标。原始的softmax 函数如下式(9)所示。
而知识蒸馏在原始基础上添加了温度参数T。
加入温度参数后的softmax 函数如下式(10)所示。
温度T 越大,软化概率分布越平缓,教师网络的预测贡献越大,最终所用的学生网络结果就更加准确。
在高温蒸馏过程中目标函数如下式(11)(12)(13)所示。
3.3.2 回归过程
对于每个地面真值盒,我们计算它和所有锚点之间的IOU,形成一个W×H×K IOU 映射m。这里W 和H 表示特征映射的宽度和高度, K表示K 预设锚定框。
然后我们找到最大的IOU 值M=max(m),乘以阈值因子ψ,得到一个滤波器阈值F=ψ*M。
对于F,我们过滤IOU 图,保留那些大于F 的位置,并将它们与OR 运算结合,得到一个W×H 掩模。
循环遍历所有地面的真实框,并结合掩模,我们得到最终的模仿掩模I。
模仿Loss 如下式(14)(15)(16)所示。
Loss 如下式(17)所示。
具体过程如图14 所示。

图14 回归具体过程框图
4 实验结果
本次实验结果的主要指标为map,将本文的知识蒸馏算法用在航天训练集上进行实验,得到的实验map 结果图如图15 所示。
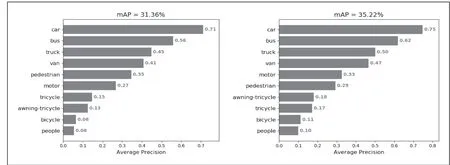
图15 map 结果图
同时与原始网络进行对比,可以看出本文提出的通过在原始网络中减少参数使蒸馏成的学生网络与原始网络进行对比检测精度在数据集上高出了3.86%,性能显著提高。上层图为教师模型,下层图为学生模型;实验结果对比图如图16 所示。

图16 实验结果对比图
5 结束语
本文针对现在道路的突发拥挤情况,设计一种基于道路监控的四轴巡检无人机系统,能实现巡查紧急情况,实时分析路况,寻找最佳道路的系统。通过信息采集单元,对传感器的数据进行采集,并通过动执行单元对无人机进行控制。在线下进行模型训练,并通过知识蒸馏的方法对模型进行压缩到核心版上。可以使线上的实时监控识别,区分路面的行人和车辆。实验表明,该系统实现既定的功能。可以有效实现监控道路的功能。
猜你喜欢
中学生数理化·中考版(2022年10期)2022-11-10 09:37:34
初中生学习指导·中考版(2022年4期)2022-05-12 00:12:51
当代陕西(2022年4期)2022-04-19 12:08:50
小猕猴学习画刊(2022年3期)2022-03-28 16:33:01
数学大王·趣味逻辑(2022年3期)2022-03-17 23:53:36
中学生数理化·中考版(2021年4期)2021-07-22 07:22:38
青年歌声(2020年12期)2020-12-23 06:30:00
中学生数理化·中考版(2019年10期)2019-11-25 09:39:06
汽车维修与保养(2019年2期)2019-06-19 03:48:14
电子制作(2019年24期)2019-02-23 13:22:20