
基于网络架构的箭载图像采集系统设计及硬件实现
2023-05-28 12:49赵子伦
宇航计测技术 2023年2期
王 旭 赵子伦 荣 刚 常 曦 张 璁
(1.中国运载火箭技术研究院,北京 100076;2.北京航天计量测试技术研究所,北京 100076)
1 引言
图像采集系统在运载器上一般负责记录运载器上的关键动作图像画面,在遥测带宽允许的情况下传输清晰的图像至地面。但由于器上发射功率有限,因此在有限的带宽内传输必要的图像信息尤为重要。
基于网络架构箭上图像采集系统,其采集的图像信息可无损存储在图像压缩器的存储模块中,经其压缩过的图像也可通过遥测传输至地面。由于采集路数较多,由控制系统提供时序通过网络进行不同飞行时段的两路图像切换,在占用少量带宽的同时传输更多种类的图像[1]。
2 图像采集系统总体方案设计
图像采集功能的实现主要由摄像头和图像压缩器组成,如图1 所示。摄像头分别布置在舱内和舱外,由于舱内光线较暗,因此舱内使用红外摄像头,舱外使用可见光摄像头。图像压缩器保存原始图像数据在存储卡中,同时对图像数据进行数据压缩,压缩后的数据以500 kbps 的速率发送至测量系统进行对地实时下传。每个图像压缩器均连接至器上交换机,经器上电缆至器地连接脱拔处,通过地面电缆至地面总控网,总控网通过以太网访问图像压缩器的IP 地址来观测器上图像信息,任务完成后通过访问各图像压缩器的IP 地址进行压缩后图像数据回读,实时图像通过422 总线使用HDLC 协议发送至测量系统对地遥测下传,地面软件实时显示图像。为节约器上无线带宽,采用分时显示的方式,即测量系统通过收到的时序开关量在对地下传遥测信息时切换至该时刻对应的重要图像[2]。
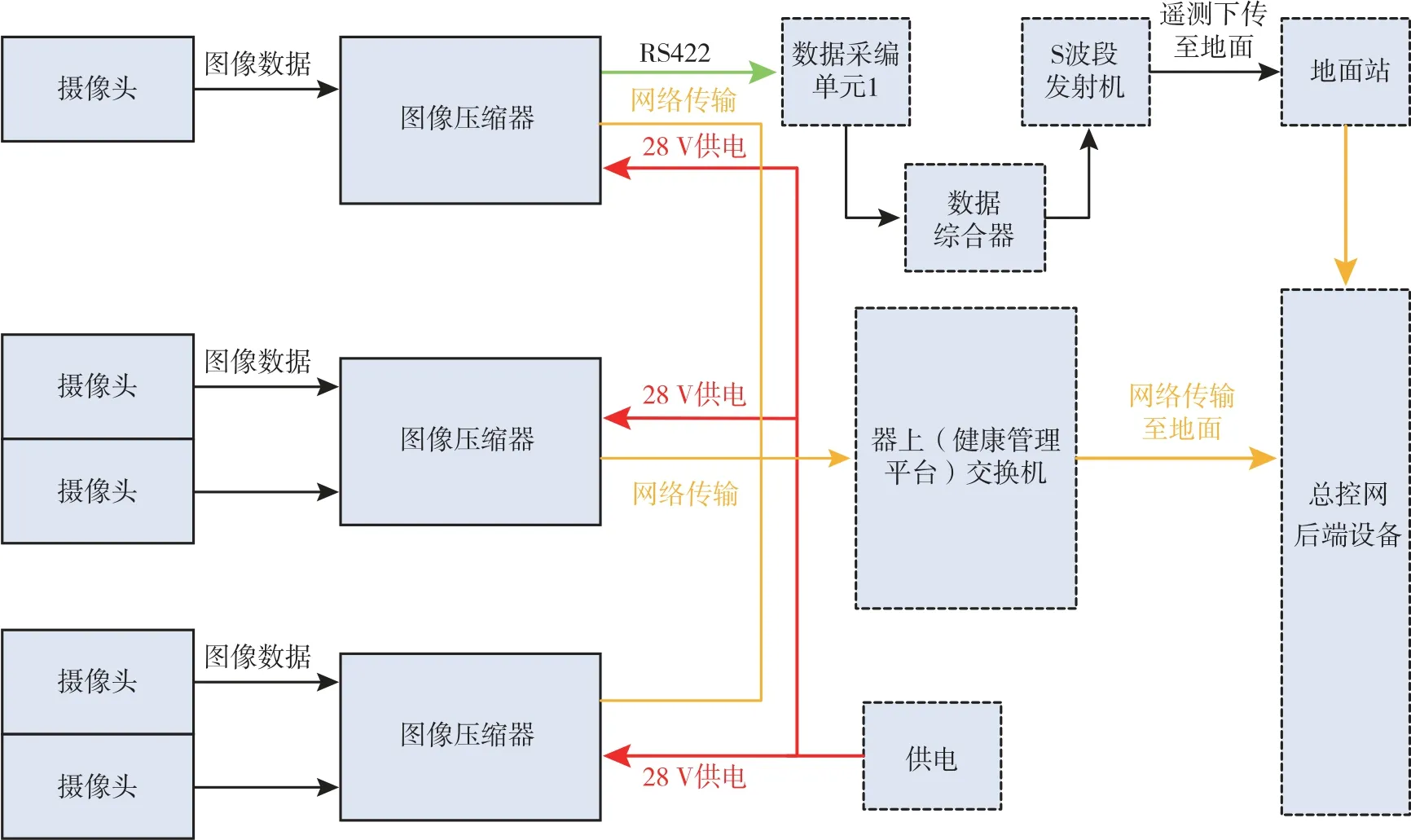
图1 基于网络架构的图像采集系统组成图Fig.1 Composition diagram of image acquisition system based on network architecture
3 图像压缩算法设计
图像采集系统的关键设备图像压缩器在满足低功耗、小型化的前提下,还要实时可靠。图像采集系统内的图像压缩器主要采取算法优化和编码器结构优化两条技术途径,解决箭上图像压缩的难题。
3.1 算法设计及优化
本系统的图像压缩算法选用H.264 标准,此标准代表了当前业界最先进的视频压缩技术,它使运动图像压缩技术上升到了一个更高的阶段[3]。H.264的编码过程比较复杂,编码流程如图2 所示。在I 帧和P 帧编码处理过程中,都用采用了决策模块,分别用于确定I 帧中的宏块是否为16×16 或4×4大小及其对应的最佳预测模式,确定P 帧中宏块大小的划分和最佳运动矢量,由此可以把决策模块分为I 帧和P 帧两种情况考虑。
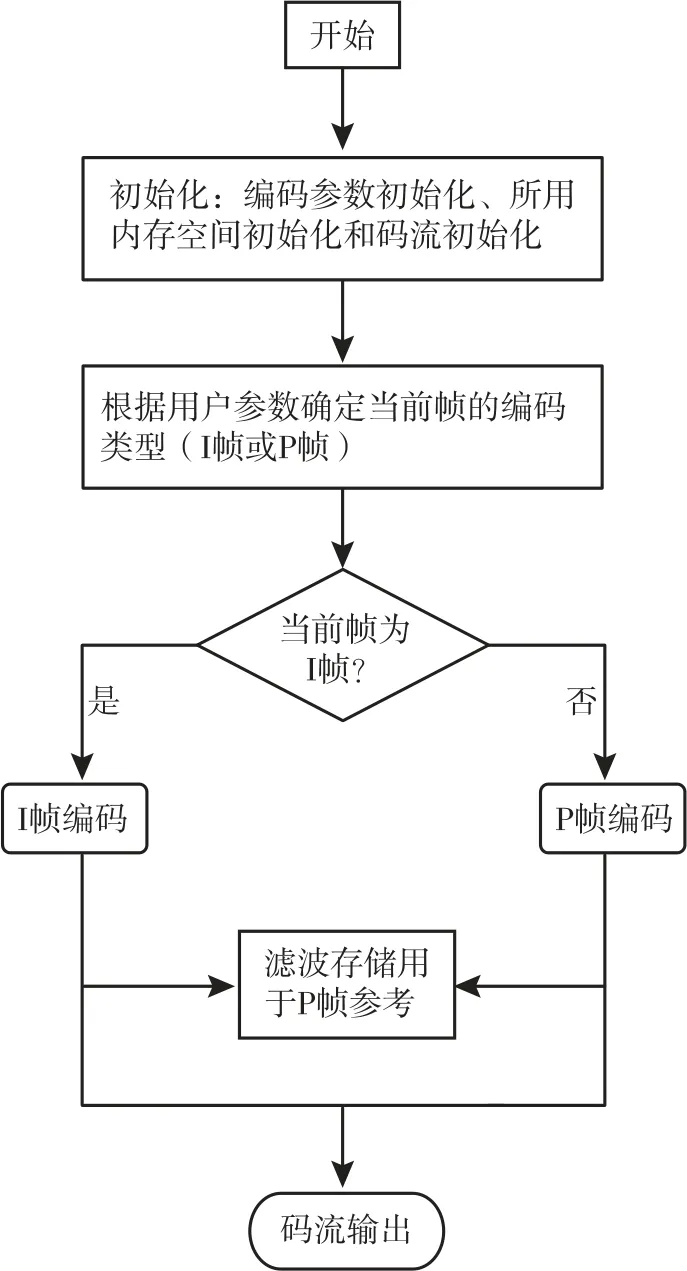
图2 H.264 编码流程图Fig.2 H.264 encoding flow chart
假设16×16 块大小最佳预测模式对应的花销(模式对应的匹配值SAD)为SADBMODE16,16×16块的帧内最佳的预测模式为BMODE16,4×4 大小块最佳的模式对应的花销为SADBMODE4,第n个4×4大小块的最佳的预测模式为BMODE4n,4×4大小时,16 个4×4 块各自的最佳模式对应的SAD值和为SADALL;帧间运动矢量对应的花销(该运动矢量对应的匹配值SAD)为SADMV,帧间块的划分模式分别为M16×16、M16×8、M8×16、M8×8、M8×4、M4×8、M4×4,各划分对应的最佳运动矢量花销(SADMV 值)分别为SAD16×16、SAD16×8、SAD8×16、SAD8×8、SAD8×4、SAD4×8、SAD4×4,每个8×8 块分成4 个4×4 块的SAD4×4 总和为SAD4×4ALL,16×16 块划分成4 个8×8 块的SAD8×8 块的总和为SAD8×8ALL,16×16 块最佳的划分为BMBMODE。
3.2 编码结构设计
在图像突变时,一般编码器输出的图像质量往往会下降,编码器编码速度也相应下降而出现丢帧问题,这是因为图像突变时码率控制函数提高了量化步长导致图像质量下降,同时图像相关性下降导致编码器计算量增大,出现丢帧现象。因此设计了如图3 所示的编码器结构,通过在一般编码器中加入异常情况处理机制,解决图像突变时丢帧和图像质量下降的问题。
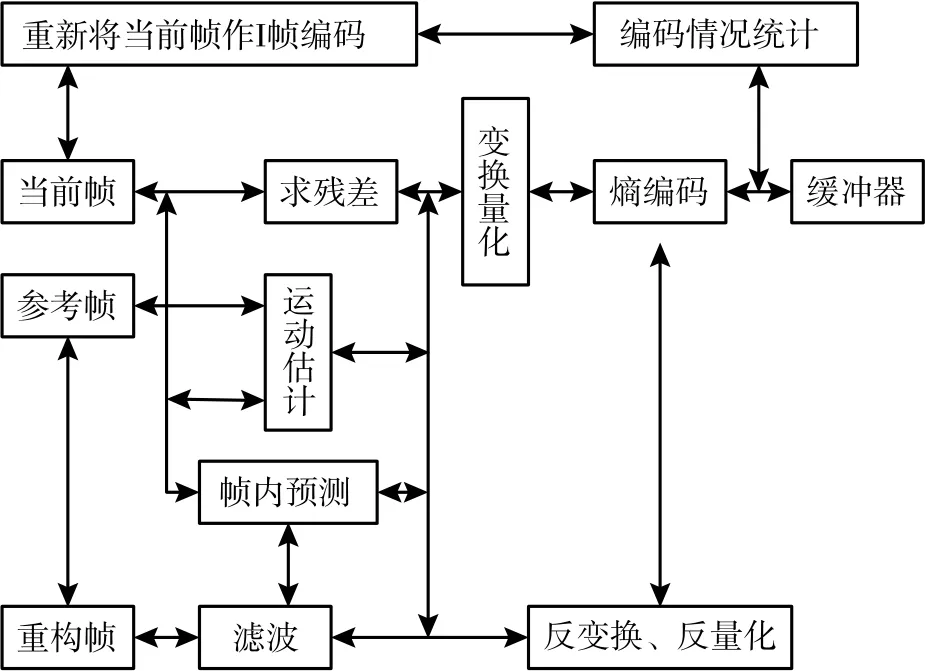
图3 编码器编码流程图Fig.3 Encoding flow chart of encoder
与一般编码器不同的是,本编码器增加了强制插入I 帧的功能,缓冲器容量较大(256 MB),且编码器能在编码过程中实时统计当前编码已产生的数据量。当图像发生异常,P 帧宏块运动矢量增大,目标块与原始块匹配性差,编码器输出数据量迅速增加,如果完成50%宏块编码时已产生的数据量大于I 帧平均编码数据量的75%,则认为图像发生异常,强制插入I 帧机制启动,对当前帧重新进行I 帧编码。为了确保不丢失异常帧,对强制插入的I 帧只进行Intra16x16 帧内预测,如果图像异常持续存在(即出现飞行异常),则执行屏蔽码率控制功能,取消容量监控。
4 图像采集系统硬件设计
4.1 摄像机模组硬件设计
摄像机模组由光学镜头、探测器、减振器组件、结构壳体构成。根据安装位置的不同分别选用不同的视场镜头,探测器选用索尼的IMX252 芯片完成1080 P 成像。由于舱内和舱外温度均较低,相机窗口会产生水雾凝结,为避免水雾影响成像观察效果,需安装镜片加热组件,对窗口进行加热。镜片加热装置包括温度传感器和加热膜,安装在相机外壳内部。
4.2 图像压缩器硬件设计
图像压缩器采用模块化设计思想,通过网络模块完成与地面及健康管理平台的信息交互[4]。整机按功能可分为两个模块,即图像压缩模块和电源模块。图像压缩器整机系统如图4 所示。
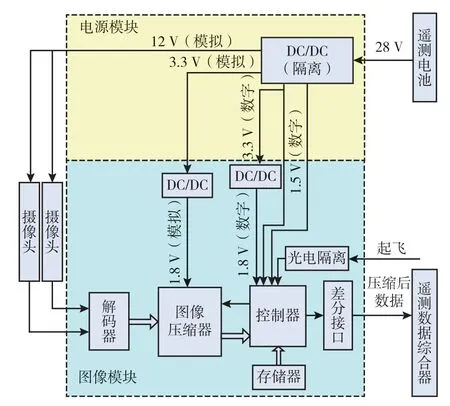
图4 图像压缩器整机框图Fig.4 Block diagram of image compressor
4.2.1 电源模块设计
电源模块提供测量系统图像压缩器内部工作的各种电源和前端图像传感器工作的二次电源。图像压缩板电源由弹上直流电源供给,输入电压为28 V±5 V,系统输入28 V 电压后,二次电源主要由TPS54360、TPS562201 等电源芯片实现内部供电需要的12 V、5 V、3.3 V、1.2 V 等电源转换处理。电源管理功能如图5 所示。
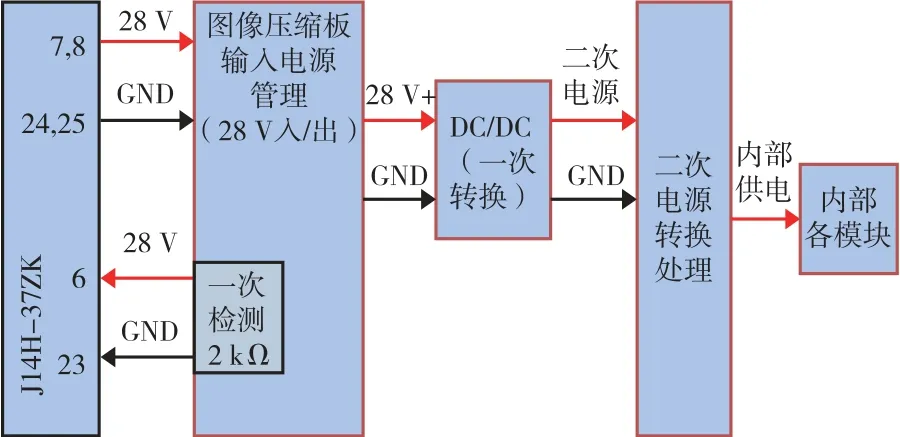
图5 电源管理功能框图Fig.5 Functional block diagram of power management
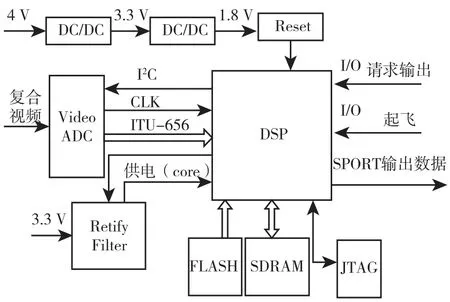
图6 图像压缩模块框图Fig.6 Block diagram of image compression module
4.2.2 图像压缩模块设计
系统提供给图像压缩模块电源后,DSP(数字信号处理器)复位,从FLASH 内装载程序代码后,完成DSP 内部寄存器初始化。初始化结束后,DSP 通过I2C 口完成对视频解码器的初始化,确定视频解码器的输入信号格式、输出信号格式等。DSP 收到视频解码器初始化结束的应答信号后,同步读入视频解码器的输出信号,完成每一帧图像的编码。
DSP 采集一场图像后,首先检测“起飞”信号,如果“起飞”信号有效,锁存“起飞”信息;其次,DSP检测“请求输出”信号,如果“请求脉冲”有效,则DSP以128 Mb/s 的速率从SDRAM 读取数据,并通过SPORT 串行接口以约30 Mb/s 的速率发送2.4 KB 数据给控制模块;最后,DSP 进行当前场图像数据编码并将编码结果写入数据存储器。DSP 在完成当前帧编码的同时读取下一场图像的原始数据。
4.2.3 网络接口设计
图像压缩器网络接口模块的主要功能是实现图像压缩器与健康管理单机的网络通讯。当接收到报文后,网络接口模块逐个完成INTERNET 协议的每一层解包,去掉网络协议的每一层首部信息和尾部信息,最后将获取的图像信息存入数据缓冲区。网络接口模块工作原理如图7 所示。
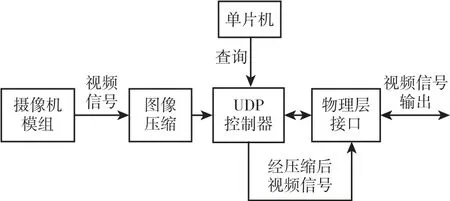
图7 网络接口模块工作原理框图Fig.7 Working principle block diagram of network interface module
网络接口模块基于单片机和网络控制器完成。UDP(用户数据报协议)控制器接收摄像机模组输出的经图像压缩模块压缩后的视频图像数据,将视频图像数据存入内部数据缓冲区,单片机通过查询方式,从UDP 缓冲区读取数据网络接口输出视频数据至其他系统。
5 测试方案设计
5.1 单机测试方案
图像压缩器地面测试台用于器上图像压缩器的单机检测,并能接收器上图像采集系统的试验数据。地面测试台原理如图8 所示。
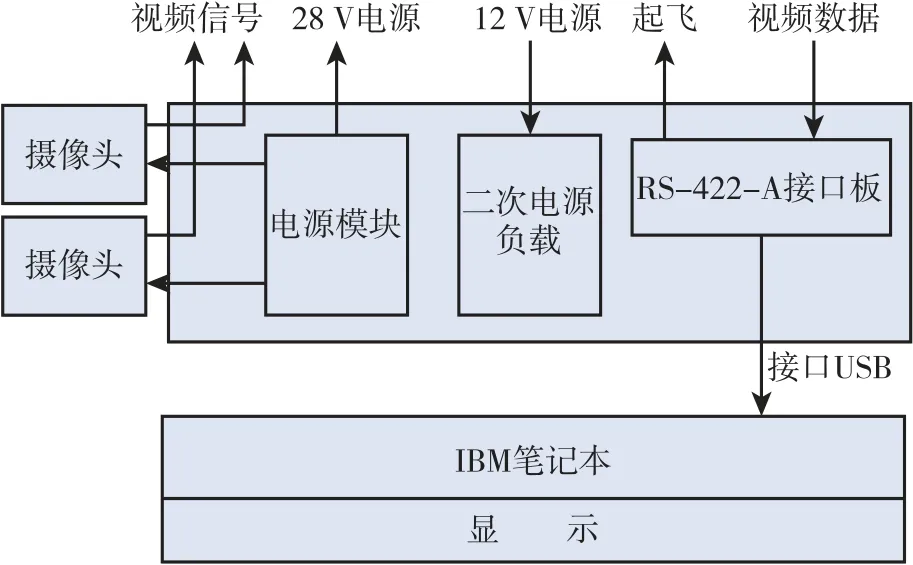
图8 地面测试台原理框图Fig.8 Principle block diagram of ground test bench
地面测试台基于计算机完成,它主要包括视频信号源(摄像头)、电源模块、二次电源负载、RS-422-A接口板及测试软件等部分。其中,摄像头模拟图像传感器输出视频信号;电源模块提供图像压缩处理器工作电源;二次电源负载模拟摄像头电源负载;RS-422-A 接口板模拟测量系统中心程序器输出信号和测量系统指令,并实时接收图像压缩器的输出视频数据[5]。图像压缩器地面测试台与图像压缩器的连接如图9 所示。
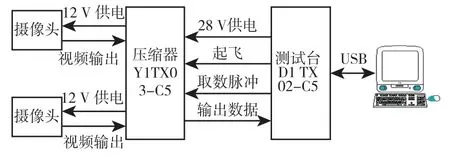
图9 地面测试台与图像压缩器连接框图Fig.9 Connection block diagram of ground test bench and image compressor
5.2 系统测试
图像采集系统加电工作时,地面总控网可通过电缆连接至器上健康管理系统的交换机,通过网络IP 地址访问图像压缩器获取器上的实时图像[6],图像经网口传输至地面解码软件实时显示图像。
运载器执行完任务后,也可通过地面软件选用视频回放模式,同样通过脱拔连接至器上进行原始视频回读,读取数据后进行视频回放。地面视频解码软件界面如图10 所示。

图10 地面软件界面Fig.10 Ground software interface
6 结束语
提出了一种基于网络架构的箭载图像采集系统,将采集到的图像数据经压缩后通过网络传输至箭上遥测系统和地面。通过箭上交换机连接箭上图像采集设备和地面测试设备,增加了器上图像传输速率,简化了系统接口和地面测试流程,同时通过分时切换的方式节约了箭上带宽,保证地面测试获取高清图像的同时也提高了获取图像信息效率。
猜你喜欢
四川轻化工大学学报(自然科学版)(2021年1期)2021-06-09
汉字汉语研究(2020年2期)2020-08-13
电子制作(2019年22期)2020-01-14
疯狂英语·新读写(2018年3期)2018-11-29
成都信息工程大学学报(2018年3期)2018-08-29
舰船电子对抗(2017年3期)2017-07-31
电子设计工程(2017年20期)2017-02-10
铁道通信信号(2016年10期)2016-06-01
电子器件(2015年5期)2015-12-29
网络安全和信息化(2015年11期)2015-03-17
