
微磁智清
2023-05-26 18:53:51王茂霖
大学生 2023年5期
王茂霖
血栓可引起心肌梗塞、脑栓塞和肾功能衰竭等。目前市面上治疗血栓的方法主要包括:注射抗凝剂、纤维蛋白溶解药物和微创导管剥脱手术等,这些治疗手段均存在较大的副作用,如出血性并发症、血管损伤和继发性斑块阻塞等。如此背景之下,用于血栓治疗的微机器人理念应运而生。
从理论上讲,微机器人兼具尺寸小、可控性能强、生物兼容的特点,在血栓治疗领域的应用潜力极大。
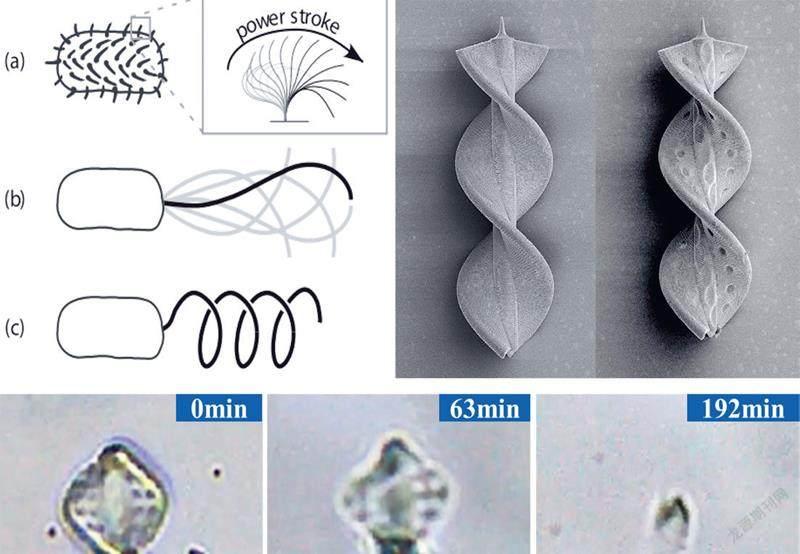
利用微机器人技术进行血栓治疗可无损地将其投放到血管病灶区域,以无线驱动的方式控制其进行清理和修复作业,这将极大地降低微创治疗所带来的手术风险以及药物治疗对人体的二次伤害风险。但在微尺度下,微机器人运动效率低,控制精度低。我们团队的“微磁智清”项目就是围绕如何实现面向血栓清除的微机器人高精度自主运动开展的。
我们的机器人系统由电磁驱动系统、仿生微机器人和视觉伺服控制系统构成。在磁驱动系统方面,团队设计具有半开放式操作空间的磁控系统,使得用户易于操作。基于逆磁法稳定、易控、高精度的优势,它生成多种磁场,且磁场误差极低。在控制系统方面,团队利用神经网络建立磁场与运动的映射作为前馈控制器,实现了微机器人高精度路径跟随和视觉伺服控制。
在体外模拟实验中,我们的微机器人在外部磁场的控制下,通过路径跟随对血栓的反复钻孔,最终实现血栓清理,比传统扩散式药物递送效率提升了30%。相比于同种类同尺寸的微机器人,我们速度更快,控制精度更高,拥有更多功能。

目前,我们的微機器人相关技术已经在301、积水潭等医院应用。
责任编辑:刁雅琴
猜你喜欢
当代陕西(2022年6期)2022-04-19 12:11:54
娃娃乐园·综合智能(2021年12期)2022-01-18 05:46:42
宇航计测技术(2018年3期)2018-09-08 02:21:36
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
物联网技术(2017年7期)2017-07-20 14:09:05
中学生数理化·高二版(2016年12期)2017-02-28 10:08:42
光学精密工程(2016年3期)2016-11-07 09:03:34
测绘科学与工程(2016年6期)2016-04-17 06:51:25
Coco薇(2016年1期)2016-01-11 16:53:24
山东冶金(2015年5期)2015-12-10 03:27:41
