航天器构型重构技术研究进展与展望
2023-05-22 03:34:18彭祺擘武新峰王北超李爽
中国空间科学技术 2023年2期
彭祺擘,武新峰,王北超,李爽,*
1.中国航天员科研训练中心,北京 100094 2.南京航空航天大学 航天学院,南京 211106
1 引言
航天任务需求的不断提高对航天器的任务能力提出了更高要求,其本质在于深化航天器的系统性能。有效载荷是航天器系统的重要组成部分,对有效载荷的选择及其应用性能的设计将直接影响航天任务的实现[1]。当前的航天任务场景复杂且种类繁多,这要求航天器的有效载荷具备多样性,使系统趋向多功能化。但传统的系统设计使得航天器的拓扑结构及其活动度相对固定,难以用于变环境、多工况的任务场景,还会受到运载火箭的多器发射与直接入轨能力以及结构承载性能的限制。因此,开发航天器的在轨构型重构是十分必要的[2]。
构型重构技术能够使航天器根据不同环境和任务进行自适应构型变换,通过增减某些结构模块或重新组合现有模块,由当前构型迅速变换为另几种适应新环境、新任务的构型[3]。利用模块变换可对任务目标进行扩展或更改,使航天器具备新的任务能力。相比于传统航天器,可重构航天器真正实现了“一体多能”,能够满足变环境、多工况的任务需求,同时实现资源节约和能耗降低[4]。
特别地,构型重构技术将有利于航天器开展在轨服务,通过采用模块化分系统、设备和器件完成在轨更换、维修和升级等操作[5]。构型重构技术使航天器具备了高冗余特性和鲁棒性,用冗余模块替换故障模块即可实现快速修复,降低了在轨维护的难度[6]。此外,构型重构技术能够改变航天器的运动方式以适应不同的任务场景,而某些特殊载荷也将具备隐蔽功能,这体现了较强的自适应性。构型重构技术还能提升航天器的经济性,可重构航天器由大量基础模块构成,可采用批量化研制,有效降低了生产成本。凭借上述特性,构型重构技术将在航天工程中拥有广阔的应用前景。
综上所述,航天器构型重构技术具有重大的研究意义,但目前对于该技术的完整综述很少。鉴于航天器构型重构研究的必要性,本文对构型重构技术展开综述。主要基于结构与功能一体化和主结构变构型技术,论述了细胞化、模块化等先进设计理念的研究现状。基于标准化模块设计和重构规划等方法,进一步归纳了构型重构技术体系。随后,概括了构型重构技术在航天器故障排除和功能更新等方面的应用前景。最后对构型重构技术研究进行总结与展望,旨在为该技术的未来发展提供参考。
2 构型重构内涵及分类
2.1 构型重构内涵
航天器构型重构是指航天器入轨后通过主结构解锁、变形和主结构再锁定等重构步骤,从发射构型变化到工作构型的过程[7]。航天器构型重构是一种综合性的航天技术,能够按照自身结构分解和重组进行规划,利用子系统和模块进行重排、更替和嵌套等方式实现系统的重新组态,以适应空间环境变化和多种任务需求[8]。航天器构型重构需综合考虑各模块结构的划分原则和组合设计方法[9],以及多任务中的模块结构、载荷和资源等要素的变化规律[10]。航天器构型重构实质上是多要素的有机再整合,系统各部分经多次关联协调,最终形成面向实际工况的高效整体。
基于上述原理,航天器构型重构能够解决目前存在的关键问题,例如载荷安装空间需求大[11]等问题。重构载荷舱具有自重构功能,在发射时重构结构收拢于主结构,以满足发射包络要求,入轨后重构结构按要求进行展开,进而实现载荷舱的在轨重构。此外,构型重构还能满足多载荷的视场和指向等需求[12]。
2.2 构型重构分类
在航天器构型重构的综合研究中,重构设计方法各异,尤其是面向实际的多工况功能需求,至今还没有一套系统、普适的方法。宏观上对于航天器构型重构一般可基于重构主体以及结构与功能进行分类(图1)。
(1)基于重构主体分类
基于重构主体的差异,航天器构型重构包括多舱段重构和航天器本体重构。首先,多舱段任务中需要航天器协同完成接近、校正和锁紧等操作,在对接完成后航天器各模块通过重构机构形成面向特定工况的组合体[13-14]。其中,空间交会对接技术是大型航天器完成在轨装配、维修和燃料补给等多目标任务的关键技术[15],对接与转位机构是空间站的重要组成部分,承担着各舱段间的对接、分离、转位和再对接等任务[16]。例如空间站、太空燃料站[17]等舱段的交会对接。国际空间站利用该技术还直接完成了桁架、太阳电池翼板和舱段的组装任务。此外在阿波罗登月任务中,地球和月球轨道上分别实现了一次交会对接,这能够区分和独立登月飞行器与返回飞行器的特有功能,进而大幅降低对运载火箭的能力需求。多舱段航天器通过构型重构能够形成一体化的航天结构,能充分利用自身的功能性直接完成特定的航天任务。
另一方面,航天器还能通过自身机构的运动实现结构和载荷模块的重新布局。本体重构根据主结构的变化情况又分为两种:1)主结构不变,仅星体表面的组件和载荷模块进行展开或收拢,例如可展开天线阵列和成像系统的构型变化等[18];2)主结构改变,包括可重构空间望远镜和太阳能电站的构型变换等[19]。此类结构一般属于体装结构,即在航天器上直接安装本体模块和可变形结构,入轨后可沿导轨进行构型重构。相比之下,航天器本体重构更能凸显构型重构的模块化特征,且鉴于空间交会对接技术发展十分成熟,已成为一项独立研究的技术,因此侧重于航天器本体重构的研究是十分必要的。
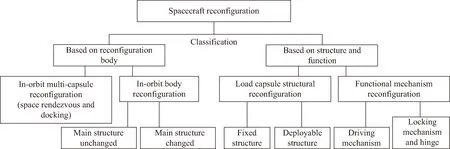
图1 航天器构型重构分类Fig.1 Classification of spacecraft reconfiguration
(2)基于结构与功能分类
在可重构航天器平台中,平台的结构部分提供变构型前后的承载和接口功能,机构部分则提供变构型中及变构型后的驱动、锁紧和释放功能[11]。按结构和功能的不同,航天器构型重构可分为航天器载荷舱结构重构与功能机构重构两部分[20]。结构重构包括固定结构与可展开结构重构,其中固定结构是指固定基座部分(主结构静架),通常为箱板组合结构,用于承载航天器的大部分有效载荷;可展开结构由多个外形与接口基本相同的分支组成(主结构动架),主要为板梁组合结构,一般用于安装航天器的相关技术设备。
功能机构是航天器平台的重要组成部分,其中驱动机构由驱动组件、传动系统、根部铰链和辅助支撑等组成,是实现可展开结构展开及锁定功能的机构。功能机构重构主要包含驱动机构、锁定机构和铰链重构,以太阳电池阵的驱动机构重构为例,该重构是根据姿态与轨道控制分系统的指令,驱动大型电池阵实现对日指向,同时将获取的太阳能通过功率导电环传输至航天器本体,以满足航天器各个部件的能源需求[21]。此外对于某些高精度、高稳定度需求的在轨任务,驱动机构重构将有利于太阳帆在轨道周期内按照特定规律进行转动[22],改变作用于太阳帆上太阳辐射的大小和方向[23],既能减小航天器的燃料消耗,又提高了任务精度。
3 构型重构技术研究进展
21世纪初,美国、日本和德国等国家开始对航天器构型重构技术进行研究,分别提出了细胞卫星(CellSat)、超级机器人(SuperBot)和卫星智能模块(iBOSS)等概念,并进一步开发了在轨服务和星表探测等典型应用[24-27]。相比之下,国内对于构型重构技术的相关研究起步较晚,研究成果较少。目前,航天器构型重构技术主要包括外围变构型、结构与功能一体化变构型和主结构变构型技术。
3.1 外围变构型技术
外围变构型技术属于航天器构型重构技术的初级研究,是指直接对航天器表面的部分组件和载荷模块进行安装或移除等操作。外围变构型技术采用的主要方式包括抽屉式、外挂式和可开合舱门式。
1)抽屉式:将载荷模块直接嵌入航天器的结构内部,更换过程中利用空间机械臂实现模块的插入和拔除[28],如图2所示。

图2 抽屉式构型[28]Fig.2 Drawer-type configuration[28]
2)外挂式:将载荷模块外挂于航天器的结构外部,更换过程中直接完成表面结构的移除和安装操作,如图3所示。

图3 外挂式构型Fig.3 Add-on-type configuration
3)可开合舱门式:将载荷模块置于航天器的舱室内部,更换过程中舱门打开为在轨服务提供通路,服务完成后舱门关闭[29],如图4所示。
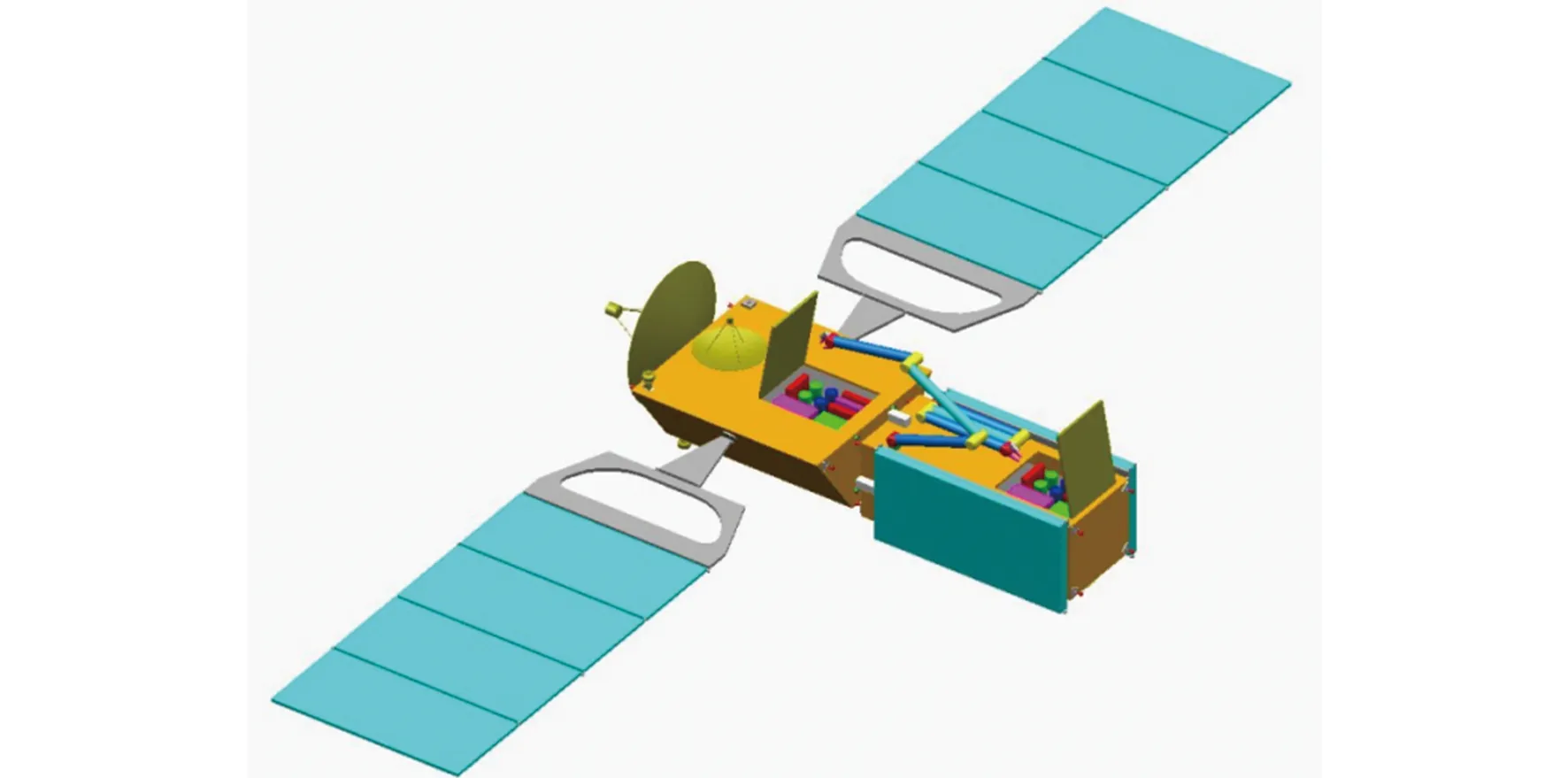
图4 可开合舱门式构型[29]Fig.4 Openable and closable hatch-type configuration[29]
特别是,中国北京空间飞行器总体部在“十二五”装备预研项目中,集成应用多功能结构技术和大负载高刚度、高精度重构机构技术,自主研制了一套重构载荷舱工程样机,该项目综合应用了可开合舱门式和外挂式的研制思路,相较于单纯的外围变构型具有更强的功能性。相比之下,可开合舱门式可为载荷模块提供较好的工作环境,但具有更高的技术难度,对执行机构要求较高。抽屉式和外挂式对执行机构的要求较低,其中抽屉式可用于小型模块的更换,外挂式构型则更适用于大型模块。
3.2 结构与功能一体化变构型技术
结构与功能一体化变构型技术是指航天器系统的可变形结构具备了特定功能,同时采用一体化的设计方法。目前,该技术在构型重构研究中发展迅速、成熟度较高,已涵盖超级机器人、细胞卫星和蜂窝卫星等多种先进研究,以及在轨维护和星表探测等典型应用,这将在本节进行重点论述。
(1)超级机器人
超级机器人是由美国南加州大学和NASA共同研制的一款新型可重构空间机器人,采用了模块化和自配置的方法以实现低成本、多功能和自适应能力[30]。SuperBot由多模块结构组成,每个模块有3个关节,中间关节可沿正反两个方向连续旋转,其余两个端部关节均能旋转±90°(图5)。多关节设计能够为SuperBot的每个模块提供高灵活性,可充当万向节机构,使模块在无需任何外部协助的情况下动态改变其形状和移动状态。

图5 超级机器人的模块设计[30]Fig.5 Design of the SuperBot module[30]
SuperBot模块使多模态转换更加灵活,例如将中间关节旋转90°,可分别转换为MTRAN形状(M模块)和CONRO形状(C模块)。SuperBot的多模块可组成多种构型以实现多形态运动,同时适应不同的环境条件、运动速度和供能效率。基于不同的目标任务,SuperBot模块能自动配置到不同系统中,可配置系统的构型包括:滚动轨道或车轮(用于正常在轨运行)、蜘蛛或蜈蚣(表面攀爬)、蛇(挖洞)、长臂(用于检查和维修)以及微重力环境中的飞行形态等(图6)。

图6 超级机器人的环形和爬虫形构型Fig.6 Annular and crawler configuration of the SuperBot
(2)细胞卫星
细胞卫星(CellSat)[31]是一种新概念纳卫星,是实现可持续空间系统的重要解决方案。CellSat由多个积木形状的细胞单元组成,具有可重构的体系架构,能够实现遥感、通信等功能。细胞单元比传统模块更小,是由模块拆分成的更小功能单元,兼具电池、处理器和通信单元的功能,能进行重组以实现特定功能。凭借独特的细胞化设计,CellSat具备了极高的灵活性,相比于传统卫星拥有更多的配置方式[32]。CellSat的细胞化特性包括:1)结构标准化;2)构型多样化;3)即插即用性(快速完成自我替换和系统修复);4)连接机构的可靠性;5)易于机器人识别和操作(CellSat的组装和维护通过空间机器人完成);6)结构轻巧;7)内部空间充足。CellSat的总线单元同样具有标准化特性,这使得CellSat的研发更加高效,批量化生产将成为现实。
基于CellSat的优良特性,日本东京大学于2005年提出利用CellSat和在轨服务机器人(OSR)共同构建新型可重构空间系统[31](图7)。其中,OSR承担着卫星组装、拆卸、加油和重新配置任务,CellSat可多次抵达OSR进行适当的维护,结束后再返回工作循环。CellSat所需的空间资源将会定期从地球发送到OSR上。故障卫星和耗尽的模块由OSR负责脱轨,将不会变成空间碎片。可重构空间系统也能持续更新CellSat的结构、设备与燃料,使卫星处于最新状态,能随时进行在轨重构以满足任务需求[33]。
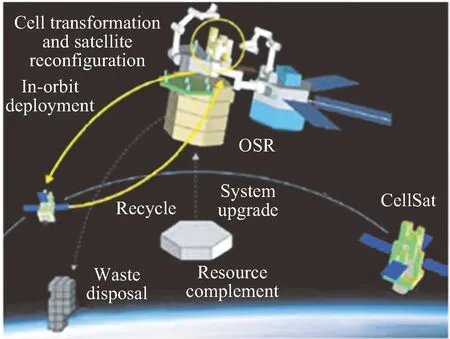
图7 可重构空间系统概念图Fig.7 Conceptual diagram of reconfigurable space system
(3)蜂窝卫星
在细胞卫星的基础上,美国国防部高级研究计划局(DARPA)提出了一种新型卫星单元—蜂窝卫星Satlet[34]。每个Satlet都能提供卫星整体功能的一部分,当硬软件聚合时即可实现完整功能[35]。DARPA的凤凰计划正在开发这种新型卫星,并通过空间机器人的在轨服务进行验证,结果表明,Satlet不受运载工具、有效载荷和轨道的限制。若将Satlet用作大多数航天器的基本单元,那将在无性能损耗和低成本的情况下实现高质量的在轨服务。
微纳星的标准化为推动航天器硬件和有效载荷的小型化提供了良好的平台,但它是以牺牲系统的某些性能为代价的。模块化航天器的接口标准化具有一定的价值,但仍需对众多异构模块进行附加性测试,因此传统的微纳星模块化方案似乎不能为空间系统提供新的可持续市场。作为凤凰计划的支柱产业,Satlet的研发能够解决上述问题,使得卫星行业能从硬软件接口标准化和大规模生产的商业杠杆中获益。结合凤凰计划首个阶段技术发展中卫星的尺寸和性能估计,仅美国发射的卫星就可以创造每年2000~8000颗Satlet的市场需求,而全球市场可达到每年10000~40000颗卫星的需求,这种可持续生产将极大推动卫星行业的发展[36]。
特别是,凤凰计划在一项试验中将Satlet应用于构建大型空间反射器系统。根据Satlet的功能性将其分为若干组,其中异构组包含了不同功能模块,例如一组携带动力单元和处理器,另一组携带处理器、数据存储和推进器,而同构组均包含了航天器功能的一部分。结果表明,Satlet提高了反射器系统的收纳比,展开后具有高刚度及稳定性。采用独立模块能扩大信息传输容量,进而实现高分辨率遥感。因此,蜂窝卫星能够让卫星的有效载荷在任务工况中发挥出更高的性能。
(4)Seasat SAR天线阵列
NASA喷气推进实验室(JPL)首次发射了载有合成孔径雷达(synthetic aperture radar,SAR)的海洋资源探测卫星Seasat[37]。Seasat通过在平台上搭载天线来发射和接收电磁波来探测海洋目标对电磁波的调制特性,其平面天线阵列由8块大型可展开相控阵构成,阵列天线的展开尺寸可达10.74m×2.16m,而收拢尺寸仅为1.34m×2.16m。
Seasat在空间运行105天,采用了重复轨道干涉模式,首次从空间获取了海洋雷达干涉测量数据。该卫星不受光照和气候条件等限制,能够实现全天时、全天候的高分辨率对海观测。
(5)花瓣式可展开成像系统
花瓣式可展开成像系统是一种典型的可重构航天器平台,以Golay-3、GSFC和Lidar成像系统为代表。这类系统一般由多组子镜组成,一般呈中心对称布局,即中间子镜维持不变,外侧子镜和次镜进行展开或收拢。
Golay-3成像系统(图8)由4组子镜构成,外侧3组次镜可折叠,相对于中心1组子镜成120°均匀分布[38]。GSFC与Golay-3类似,同为中心对称布局,差别则是前者由“1+8”组子镜构成,8组次镜的折叠方式与Golay-3也存在差异,8组次镜可交替折叠在中央的正八边形子镜的上侧或下侧[39]。
Lidar成像系统(图9)是NASA兰利研究中心和科罗拉多大学于20世纪90年代末提出。Lidar系统采用“1+6”中心对称布局形式,1组中央子镜采用六边形构型,6组次镜采用四边形构型,收拢或展开靠执行机构,次镜向上折叠以较低的发射状态解决火箭发射包络的限制。
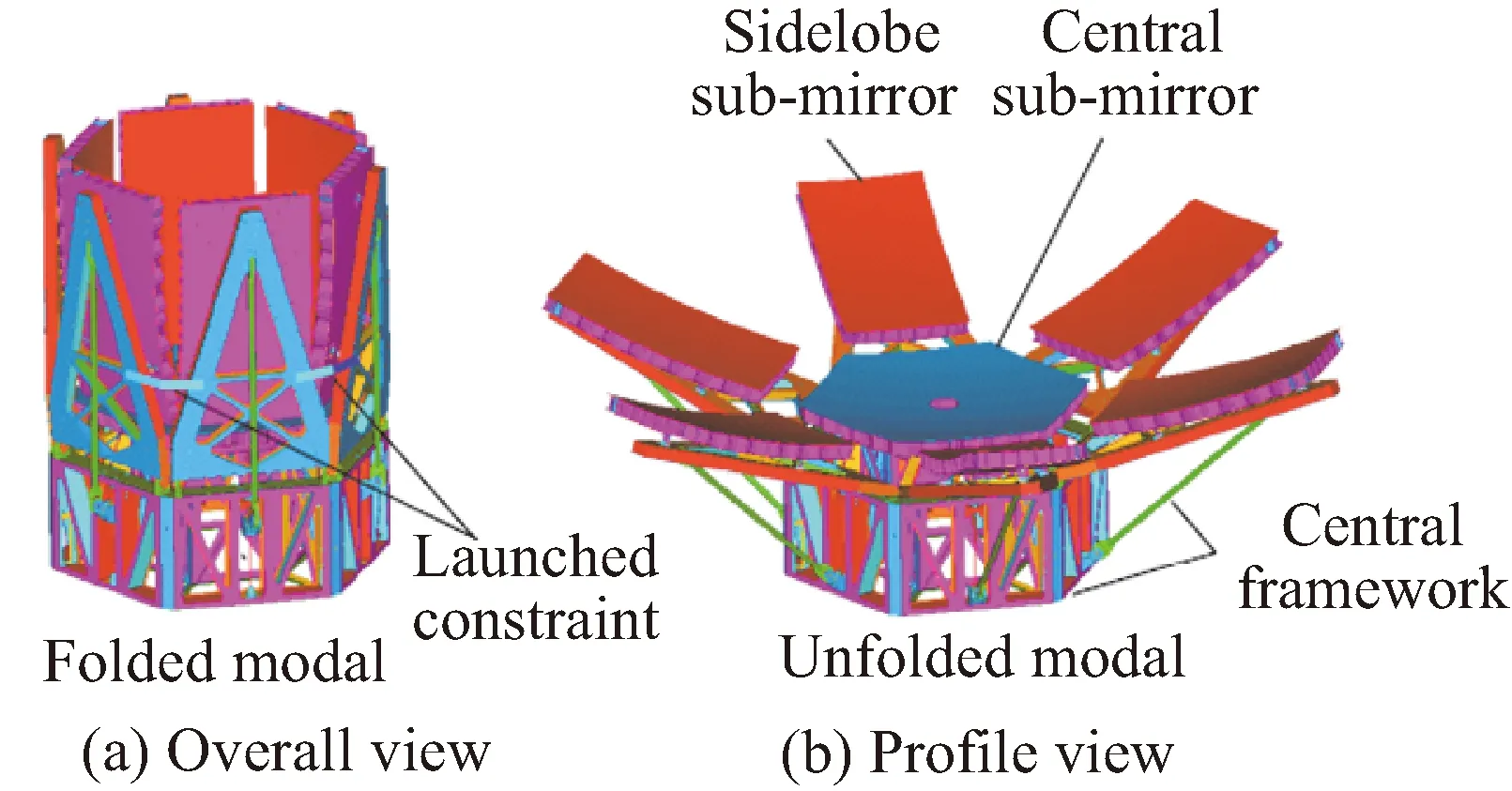
图9 Lidar成像系统的构型重构Fig.9 Reconfiguration of the Lidar imaging system
(6)可重构探测机器人
在航天器构型重构中,功能机构的解锁、展开、锁定和多自由度部件的在轨组装,都需要配备灵活且可靠的空间机器人[40]和高精度机械臂[41]。然而空间机器人的耗能较高,在复杂环境中很难实现长时间、大范围的设施建设与维护[42]。因此依托于机器人技术的发展,可重构空间机器人应运而生。
目前,可重构空间机器人主要用于月球等星球的表面环境与资源探测任务。如图10所示,ESA研发的可重构月球车[43]通过6个驱动轮的构型变化实现了多足爬行和机械臂工作的多重构形态,具有较强的灵活性和稳定性。随后DLR提出了模块化多机器人月面探测[44]的概念,其探测任务由四轮机器人Sherpa和六足机器人Crex共同执行,二者能完全独立工作,也可通过机电接口重构为综合勘探多机器人系统(图11)[45]。相比之下,该系统还能实现初级人工智能,如识别和绕过障碍物等操作。

图11 德国可重构多机器人综合勘探系统[44-45]Fig.11 Reconfigurable multi-robot integrated exploration system of the DLR[44-45]
上述可重构空间机器人均具备了高度的自主性和极强的环境适应性,在复杂的月面地形中仍能满足星表探测和土壤采集等任务需求,此外还能同时完成高价值目标的精细化维护,包括燃料补给、物资运输、模块更换与重构利用等工作[46],这对于可持续的星表探测具有重大意义。
综上所述,结构与功能一体化变构型技术已获得广泛的研究与应用,这将极大推动航天器构型重构技术的发展。值得注意的是,结构与功能一体化变构型是特定载荷为了适应火箭发射包络所进行的自重构,比如大型SAR天线和成像系统,均属于航天器构型的定制设计。因此鉴于各类航天器的结构与功能存在一定差异,细胞卫星、蜂窝卫星等先进理念的应用拓展将具有很高的研究价值。
3.3 主结构变构型技术
多年来,航天器的主结构设计主要面向克服发射阶段的力学载荷展开[47],而在轨服务中航天器构型的功能需求是“对天、对地”面积大,这本身就是一对矛盾。前一载荷的发射要为后面的载荷腾出空间,以达到最优的发射姿态。且功能的高度需求要求航天器有效载荷的布局空间更大,即确保多载荷布局[48]。另外,对于航天器关键模块的在轨维护,现有的机械臂操作空间有限,尤其模块位于航天器主体内部时将无法进行维护操作[49]。因此面向上述挑战,主结构变构型技术应运而生。
(1)多任务模块化航天器
对主结构变构型技术的研究可追溯至20世纪70年代,NASA首次提出了适用于多任务的模块化航天器(multi-mission modular spacecraft,MMS)[50]的设计理念,如图12所示。MMS是一种典型的主结构变构型系统,将姿态控制、通信与数据处理、电源、热控模块等标准子系统进行重新组合,兼具在轨装配、维修和升级等功能,能有效延长航天器的运行寿命,并增强系统的鲁棒性。

图12 MMS模块化子系统Fig.12 The MMS modular subsystem
(2)卫星智能模块
2010年,DLR开展了卫星智能模块(iBOSS)项目[51],旨在利用在轨服务航天器将智能模块立方体装配成模块化可重构航天器。iBOSS从传统卫星发展成标准化、智能化的构型模块卫星,每个标准化模块均包含了重要的系统组件,通过构型重构能够实现系统的功能拓展与维护。
如图13所示,智能空间系统接口(ISSI)是iBOSS卫星的核心组件,这种多功能接口能在各模块、星载部件和有效载荷间建立机械、信息和能量的联结。其中外侧4个角点均配有一套机械接口,每套包括2组导向/锁紧装置,锁扣与局部凹槽的配对设计能够实现锁定与解锁。模块安装面的中心位置还配有多个电/信息接口,在组装角点机械接口时这些接口也能进行同步连接。功能联结的整体性和可操作性是iBOSS的关键原则,也是在轨服务的重点需求。
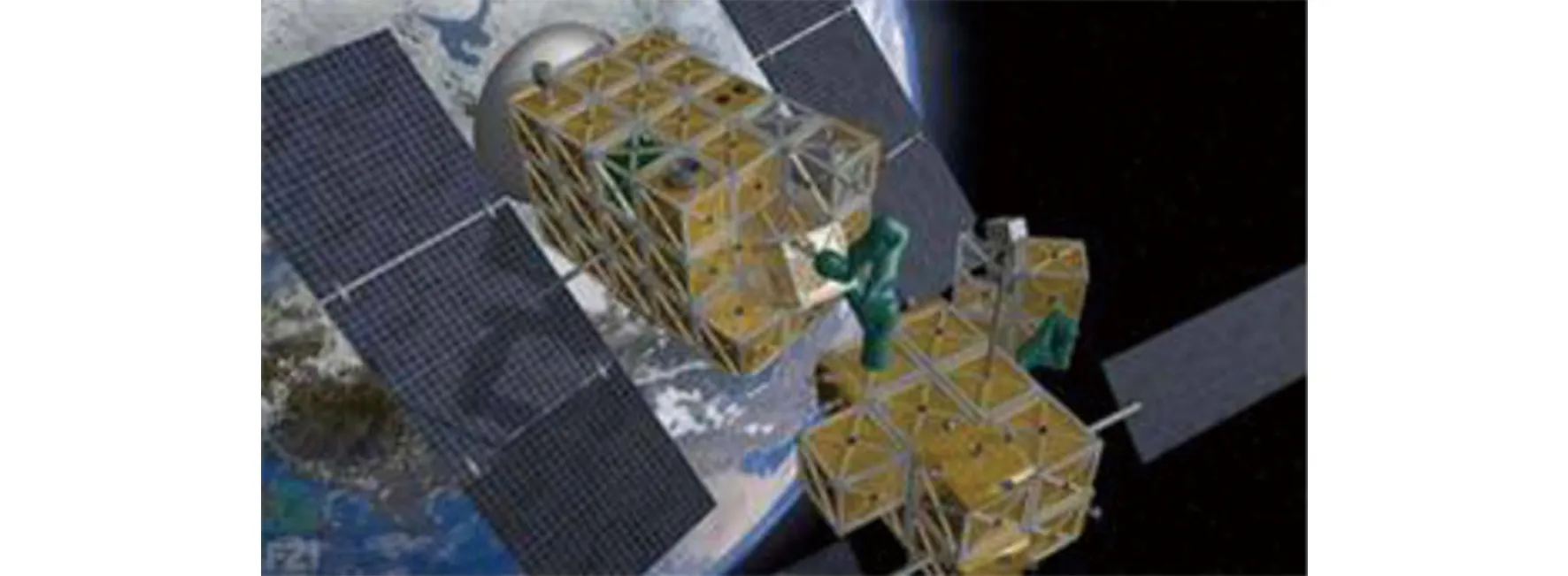
图13 iBOSS单元卫星[51]Fig.13 The iBOSS element satellite[51]
(3)空间维护维修平台
标准化接口技术的迭代和即插即用技术的发展已成为主结构变构型技术发展的必要条件。空间维修维护平台(space maintenance and repair technique,SMART)由美国国防部主导的SCOUT计划支持,其核心技术体现在SMARTBus总线的设计上,总线可为模块化航天器系统提供一系列机/电/逻辑(互操作性/软件)标准。基于该标准研发出了多六边形模块堆栈结构,每个模块均可执行特定的子系统功能,通过总线联结以实现整体功能。SMART的研发能够解决航天器局部模块的在轨维护问题。
(4)可展开航天器HEXPAK
HEXPAK也是基于模块化设计理念的一种可展开航天器[52],由美国Lockheed Martin公司专门为空间快速响应任务所研制。HEXPAK继承了现有的可重构系统部件,板舱间统一采用铰链连接,所有的供配电缆都被嵌入底板夹层,并在底板设计了标准规格的机械锁紧机构,便于继承性部件的安装和测试。HEXPAK采用多层大型可展开结构,通过主结构重构的方式增大了单元内的热控辐射面积,最优利用了火箭整流罩内容积和航天器可装配空间。
(5)可重构空间望远镜
主结构变构型技术也能同样应用于太空观测任务中。为实现更深入的太空观测,目前正在推进开发光学直径大于10m的空间望远镜[53](Hubble望远镜的主镜直径约为2.4m),这类带有大型主镜的空间望远镜有望扩大人类对宇宙的认知。
英国萨里大学和美国加州理工学院联合开展了太空观测卫星的在轨重构研究,使用2颗搭载高精度自适应反射镜的3U立方星和1颗15U的主平台卫星进行可重构空间望远镜的自主装配(AAReST)[54],进入轨道后这些卫星可重新配置成一个超大型分段式光圈。AAReST采用主聚焦设计(焦距1.2m,视野0.3°),主镜稀疏孔由多个直径为10cm的圆形反射镜组成。在满足初始校准和成像要求后,立方星携带的两个反射镜将从镜组中分离并进行重新定位,仪表组重新组装后将再次执行镜面校准和成像。试验结果证明了AAReST能够以较低成本通过直接装载实现最佳成像任务。
(6)多旋转关节空间太阳能电站
为实现太阳能的大规模开发利用,国际上开展了空间太阳能电站(space solar power station,SSPS)的相关研究。SSPS能够持续接收太阳能,不受季节和昼夜变化影响,且接收的能量密度高,是地面平均光照功率的7-12倍,还能实现稳定的无线能量传输[55]。SSPS将彻底改变人类获取能源的方式,带来新能源、新材料和光电技术等多领域的重大创新。
基于主结构变构型技术,钱学森空间技术实验室于2014年提出了多旋转关节空间太阳能电站的设计方案(multi-rotary joints SSPS)[56]。如图14所示,电站系统由太阳能收集与转换、电力传输和信息管理等7个分系统构成,太阳电池阵、微波发射天线等主结构均采用模块化设计理念,便于系统制造和在轨装配。电站采用多个独立的太阳电池子阵和中等功率的导电旋转关节代替传统的整体式阵列,解决了目前大功率导电关节旋转的技术难题和关节单点失效问题。此外,电站还使用大型动量轮控制各电池子阵的对日定向,降低了推力器的使用数量和燃料消耗。

图14 多旋转关节空间太阳能电站方案[56]Fig.14 Scheme of the multi-rotary joint SSPS[56]
主结构变构型技术能够根据空间任务需求的差异,实现航天器模块化设计、缩短测试流程和研制周期等目标。然而,这类航天器大多未经历在轨运行试验,目前仍处于样机研制与技术验证阶段。
基于上述研究,模块化和细胞化已成为航天器构型重构技术的核心发展理念,这使航天器兼具灵活性强、功能丰富和操作简便等优势,将更好地完成在轨服务和星表探测等重大空间任务。模块化航天器将成为新一代航天器的设计模式,对航天工程领域的科学探索意义重大。同时,研制细胞卫星可以极大降低卫星的研发费用,实现批量化生产。
4 构型重构技术体系
4.1 标准化模块航天器设计技术
标准化模块设计将成为未来航天器构型重构技术的主流发展趋势[57]。标准化模块航天器由多个功能独立、构型相同、具有标准接口的功能模块组成,各模块间具有可连接性和互换性,能进行连接、分离和置换以改变构型,在保持整体连通性的同时扩展运动形式和功能。基于主结构变构型技术,标准化模块卫星可进行组合发射(图15)。首先设计合理的模块化初始构型,然后将多颗卫星组合成标准的发射构型,入轨后发射构型并分离解体。卫星根据模块上传感器所提供的关键信息进行在轨重构,变换为目标构型以执行新任务[58]。

图15 标准化模块卫星的组合发射与在轨自重构[58] Fig.15 Combined launch and in-orbit self-reconfiguration of standardized modular satellites[58]
对于标准化模块航天器设计,首先需要解决功能模块间的通信问题。在复杂的任务场景中,航天器的传感器、控制器与执行器模块需要通过无线网络进行大量的信息交换。为保证各模块的协调一致和稳定运行,模块间需要灵活、高效的无线网络通信以保证信息实时传输。模块化系统还需降低功能模块间的通讯频率,无线网络受限于通信带宽,因此要在保证系统性能的同时降低通信负载,以提高网络资源利用率。此外多模块空间布局设计、构型重构分析及工作模式研究也需要进一步探索。
总体而言,无线网络通信技术、信息交互技术、功能协同技术、构型保持、重组与功能适变技术已成为标准化模块航天器设计的关键技术,同时为多模块系统的可重构和即插即用特性提供了顶层技术支撑,而具有网络化系统架构的即插即用技术也将推动未来模块化航天器的高质量发展。
4.2 航天器构型重构规划技术
重构规划是航天器构型重构中的关键技术。在构型重构过程中,需多次执行航天器重构规划以得到可行的自重构策略,并根据该策略完成与目标任务相适应的构型重构。目前,航天器重构规划研究主要集中在两个方面:1)以可重构航天器的模块结构为本体,由本体结构决定其运动规则及重构规划方法;2)以重构规划运动算法为主体,借助已研发的模块构建平台提出多种规划算法。
第一类方法是航天器重构规划的主流方向,已应用于具体的可重构航天器中。基于生物免疫网络体制,Mitsumoto提出了细胞卫星的分布式控制算法,即每个模块直接根据自身周围环境决定下一步运动[59]。此外还提出了基于能量激励和能量抑制的规划方法用于实现系统的构型重构。Collins针对SuperBot的协调运动和灵活控制,构建了总体控制框架以实现空间内大面积自重构[60]。随后Moll研究了SuperBot的运动步态,提出一种计算质心位置的分布式重构规划方法,运用自身步态作为运动指导以协同其他模块的关联信息,保持SuperBot在构型重构过程中的姿态稳定[61]。实现多模块同时变换到目标构型以提高重构效率,Fitch利用Markov决策法实现智能模块的重构规划,即单个模块根据相邻模块信息搜索到达目标区域最近的路径[62]。这种动态规划方法能够使多模块同时移动至目标位置且不发生碰撞,高效实现了构型重构。上述研究均基于典型的可重构航天器开展重构规划研究,根据模块结构特点给出了有效的运动规则和重构控制。
第二类重构规划算法包含了图论法、势函数法及遗传算法等,并运用动力学仿真平台对规划算法进行三维仿真,以验证方法的可行性。张鑫针对可重构机器人的自修复过程,利用图论表示全局的拓扑构型,并在模块中存储了逻辑简单、运算量小的运动规则,为后续的运动规划奠定了理论基础[63]。费燕琼利用当前构型与目标构型的位置差异作为势函数,在运动范围内对模块进行逐步填充以实现模块自重构规划,并搭建三维平台对自重构过程进行仿真[64]。吴秋轩利用构型重心与目标构型重心形成的空间矢量进行了智能模块的重构规划,并开发了基于Agent系统的仿真平台,对模块规划进行了仿真[65]。此类方法能够解决较少模块的构型重构规划问题,但用于复杂构型的规划算法复杂度较高。另外当前着重于空间内无指向性约束的航天器重构规划研究,但在实际工程中某些功能模块会有特定的指向性需求,因此需要深入优化重构规划算法。
4.3 一体化资源整合与分配技术
在模块化航天器的重构规划过程中,还需对多模块系统进行全局整合与动态分配,以优化其资源配置。相对于传统航天器固定的信息网络连接、热控流体回路布局和总体电源储存与供给,可重构航天器的热流、信息流、能量流、工质流等都需要全新的一体化设计,以适应不同构型下的信息与资源交互。
作为一体化资源整合与分配任务中的一类典型技术,航天器能源管理技术能够在有限的能源供给条件下,优化负载管理,高效完成能源调度[66]。以航天器能源管理与信息传输系统为例,整个系统采用模块化设计,围绕太阳电池阵、电源控制单元、逻辑与控制单元、双向变流器、一次母线等环节展开。特别是,逻辑与控制单元采用集中式控制,同时具备了较强的数据采集、运算与管理功能。系统中采用的关键技术包括:能源存储技术、电源控制技术、信息处理技术、超导技术等。
可重构航天器的发展对能源系统的稳定性、带载能力和传输效率等性能指标提出了更高要求[67]。为延长可重构航天器的在轨寿命,进一步提高运行效率以顺利完成在轨任务,一体化资源整合与分配技术已成为亟待研究的关键技术。
4.4 变参数动力学分析技术
可重构航天器的典型动力学特征主要表现为构型重构引起质量特性随时改变,使得系统动力学参数具有不确定性。建立变参数航天器的在轨动力学模型,分析任意工况下的变参数系统动力学特性已成为航天器构型重构技术发展的重要环节。
当前许多方法已用于变质量刚性系统的动力学分析。Cayley首次发现质量无穷小的粒子本身不会发生任何的速度突变[68],然而粒子间若存在一定联系,则可能发生突变。Poisson对变质量系统进行动力学分析,得到了系统的d′Alembert形式[69]。该方法可直接列出不包含约束条件的动力学方程,简化了分析过程。随后,Eke研究了系统质量和几何形状等参数对变质量系统的动力学行为的影响,发现系统质量与运动频率成负相关,而几何形状的影响较小[70]。Meshcherski首次提出了变质量系统中反作用力的概念,将Newton运动定律应用于系统动力学分析[71]。在此基础上,Meirovitch利用Newton-Euler法和Hamilton原理等多种方法推导了变质量系统的动力学方程,并拓展至多自由度系统[72],Eke则采用了Kane法。Cveticanin推导了变质量平动系统的Lagrange方程,并求得了系统的整体位移响应[73]。但对转动系统的研究还处于起步阶段,且平动与转动耦合会使系统的动力学行为复杂化。
面向多旋转关节空间太阳能电站等变质量挠性连续系统,有限元法[74]、假设模态法[75]和伽辽金离散法[76]均可用于系统动力学分析,但更简单有效的方法仍有待开发。综上,表1对比了上述方法各自的优势和不足,这为变参数动力学分析在构型重构技术中的发展提供了参考。
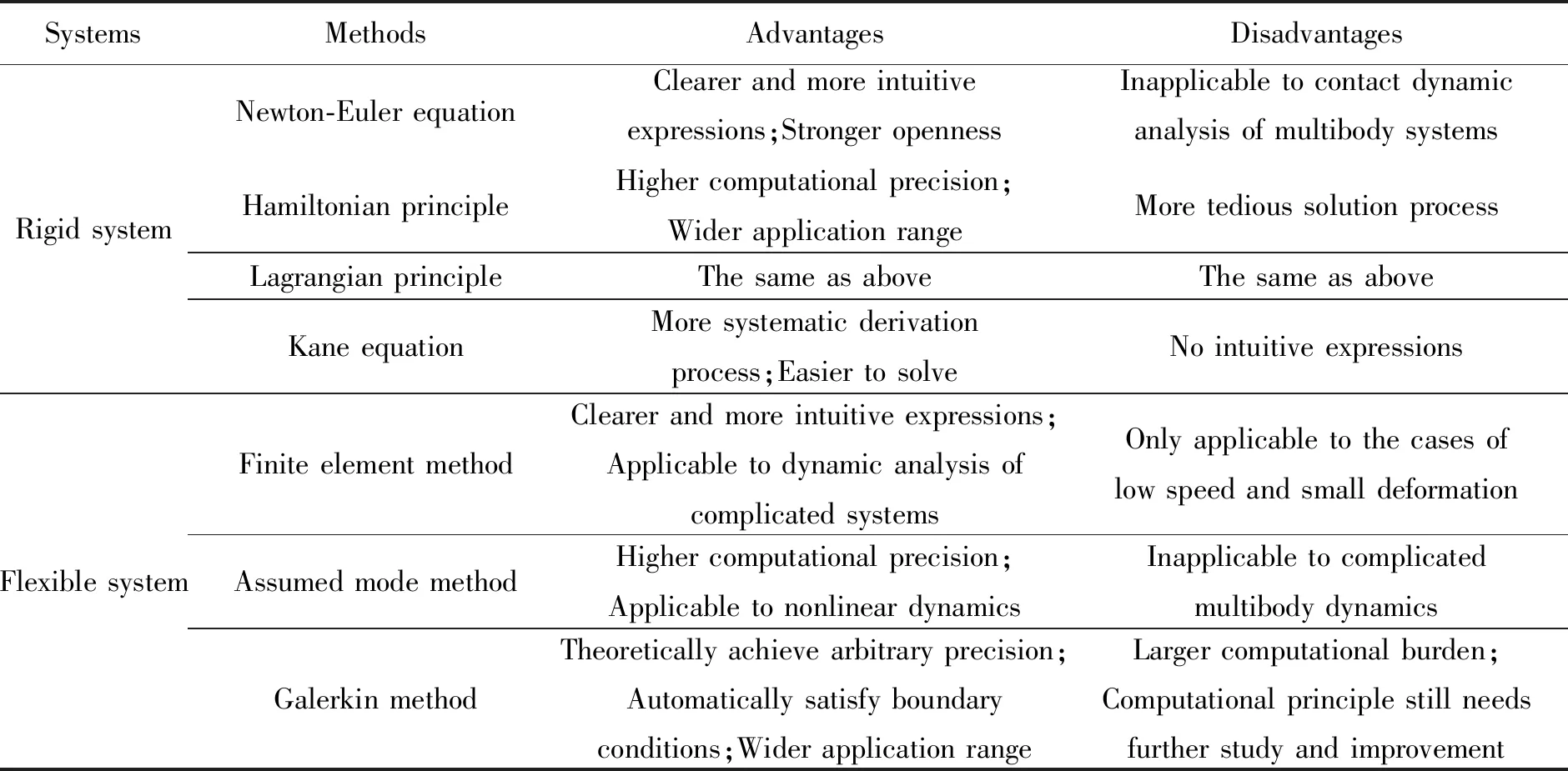
表1 变参数动力学分析方法的优势和不足[69-76]
在构型重构技术体系中,标准化模块航天器设计和构型重构规划等技术日益成熟,将成为未来航天工程领域的研究热点。然而,航天器系统的通讯能力、重构规划与控制等方面还应继续改进:
1)对于挠性模块化航天器的研究较少,当前研究未考虑通信因素和复杂环境对构型重构稳定性和动态性能的影响。挠性振动难以直接测量,信息不全的模块化航天器振动抑制需深入研究。此外,考虑执行器故障和控制性能优化的模块化航天器姿态控制也将成为未来的研究方向。
2)应降低航天器各功能模块间的通讯频率。充分利用网络资源。事件触发机制能有效利用系统采样信息,判断测量值是否通过网络传输。在采用该机制降低通讯频率的同时,避免无限触发(Zeno)现象对于模块化航天器的发展具有重要意义。
3)细胞卫星的研发成本较低、体积较小,但由于自身质量和体积限制,其通讯能力和计算能力明显弱于传统卫星,复杂场景应用的可行性不足。在复杂任务中增大细胞卫星的数量会产生大量数据交互,这将增加未来模块化航天器的应用难度。
5 构型重构技术应用前景
5.1支持航天器在轨故障排除
航天器在轨故障排除已成为当前的研究热点之一。由于航天器系统自身的复杂性和空间环境的特殊性,各类运行故障问题时有发生。根据2021年公开的卫星故障典型案例[77],卫星刚发射后就出现了26次故障,与前五年相比次数明显增多。这些故障包括能源系统故障(电路短路、太阳帆板无法蓄能);推进系统故障(飞轮故障、管路堵塞)和主载荷故障(通信卫星转发器能力降低、敏感器污染)等[78]。若不能及时、准确地排除运行故障,航天器系统将遭受严重损失。
构型重构技术对于未来航天器的在轨故障排除具有重大意义[79],构型重构技术能够克服目前机械臂操作空间有限的问题,快速排除系统表面和内部模块的运行故障。然后对故障设备进行维修并回收失效设备,可进一步延长航天器的运行寿命。另一方面,基于模块化理念对失效设备的失效机理进行研究,能够改进制造工艺以提高结构可靠性,同时弥补空间寿命试验数据不足的问题,进而减小故障发生的概率。
5.2 支持航天器功能更新
对于航天器系统中的高成本设备,如有效载荷和推进系统等,通过增减某些功能模块并进行重新组合,以完成模块化功能部件的更换,进而实现系统的功能更新。采用构型重构技术能有效增大航天器平台的外挂面积,实现多载荷布局,因此理论上通过构型重构实现航天器的大规模功能更新是可行的,特别对于某些昂贵的大型航天器平台,收效将更为显著。
以上文论述的SuperBot为例,研究者们进一步更新了SuperBot的应用功能:1)微型移动检测系统,可作为一种经济有效的方法来检测水资源或地震特征,也可用于化学元素勘探和导航信标;2)多用途月球探测器,能够辅助宇航员的日常工作,在月球探测和开发中起到重要作用;3)生物环境维护与操作系统,具备了风化层的大规模挖掘能力,可用于处理某些危险任务,还能在短时间内为航天器提供大量补给,具备了较强的后勤保障能力。以上功能极大增强了航天器面向多类任务的灵活性和操作能力,为航天器功能更新提供了新的途径。
5.3 实现天基平台功能拓展
可重构天基平台将成为未来重要的空间基础设施,具有极高的战略意义。可重构天基平台具备了诸多优势,如航天器模块可通过在轨组装拓展航天器空间尺度,解决火箭发射包络限制等,能够实现更丰富、更优越的平台功能。
航天器的功能模块可通过构型重构完成在轨服务,实现多模块的功能复用和高效利用,充分发挥经济效益。可重构天基平台安装了通用的结构对接模块和电/信息管理模块[80],能为有效载荷提供统一的供电、测控、轨道和姿态控制等服务,进一步拓展了平台功能并缩短了模块的研制周期[81]。基于主结构变构型技术,还可采用搭载发射和一箭多星的发射方式,极大降低了航天器的发射成本。
5.4 促进空间技术创新
基于可重构航天器系统的模块化、细胞化技术牵引,实施构型重构技术的创新驱动战略,可以促进航天工程领域的诸多技术创新,带动中国空间技术的进步和产业发展[82-84],主要体现在:
1)航天器标准化模块设计和即插即用技术的创新,以及航天器在轨组装与维修技术的进步;
2)超柔性大功率空间可重构系统的创新和能源管理技术的进步;
3)大型分布式航天器的高精度、高稳定度姿态测量和重构控制技术的创新与进步;
4)分布式综合电子技术的创新,以及空间光电交换、无线通信和光纤总线技术的进步;
5)大型多自由度空间机器人技术的发展;
6)空间多层次遥感(地月空间)技术的发展;
7)超大型可重构航天器地面验证技术的发展。
6 结论
航天器构型重构技术的发展带来了航天工程领域的技术革新。作为在轨服务等重大空间任务的关键技术,构型重构技术从根本上实现了航天器的多功能化。通过快速的在轨模块组合和构型变换,航天器能够完成变环境、多工况下的空间任务,兼具较强的鲁棒性、自适应性和经济性。
构型重构技术在航天工程中应用广泛,结构与功能一体化变构型和主结构变构型技术又丰富了构型重构技术的发展方向。基于细胞化和模块化设计的新型航天器已成功应用于在轨维护和星表探测等大型任务,极大推动了行业发展。特别地,主结构变构型技术能够解决发射包络对航天器平台构型和布局的约束问题,为有效载荷提供最优的发射姿态和配置空间。随着标准化模块和即插即用技术的兴起,主结构变构型技术在未来将实现航天器平台的跨越式发展,具有更高的应用价值和经济效益。
航天器构型重构技术更趋向综合性和多元化发展。目前,标准化模块设计和构型重构规划等关键技术形成了构型重构技术体系,这同时与无线网络通讯、信息交互、动力学仿真、能源管理等技术密切相关。因此,多种关键技术的协同进步对于航天器构型重构技术的未来发展至关重要。
猜你喜欢
国际太空(2022年7期)2022-08-16 09:52:50
海洋信息技术与应用(2022年1期)2022-06-05 07:38:22
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08 00:48:08
现代装饰(2020年5期)2020-05-30 13:01:56
国际太空(2019年9期)2019-10-23 01:55:34
国际太空(2018年12期)2019-01-28 12:53:20
国际太空(2018年9期)2018-10-18 08:51:32
中国核电(2017年2期)2017-08-11 08:00:56
流程工业(2017年4期)2017-06-21 06:29:50
北京航空航天大学学报(2017年10期)2017-04-20 08:51:23