
基于专用短程通信技术的自动跟车控制策略研究
2023-05-22 03:56:40林志超林小敏郑志晓
汽车实用技术 2023年9期
林志超,林小敏,郑志晓
(1.广东省智能网联汽车创新中心有限公司,广东 广州 511434;2.广州汽车集团股份有限公司汽车工程研究院,广东 广州 511434)
近几年越来越多的车辆搭载自适应巡航系统,但目前的跟车巡航功能仅依靠自车传感器信息进行巡航控制,而自车传感器存在精度受限和受环境影响较大等问题,且车与车之间没有信息交互,都是以固定规则的跟车距离巡航跟车,无法最大程度兼顾跟车安全和道路通行效率[1]。
而随着新一代专用短程通信技术(Dedicated Short Range Communication, DSRC)的发展,结合DSRC技术的自动跟车系统,可实现车与车之间实时信息交互和共享,实现车车协同,从而能够较大程度兼顾跟车安全性和道路通行效率[2]。
基于上述分析,针对自动跟车功能,本文利用 DSRC技术实现车车协同,充分获取前车关键状态信息,实现前车与自车的信息实时共享和交互,充分利用 DSRC实时信息,搭建了一套基于DSRC技术的自动跟车控制策略,以保证跟车安全性,同时兼顾一定的通行效率。
1 自动跟车系统方案
1.1 自动跟车系统硬件构成
自动跟车控制系统,通过将专用短程通信设备搭载在智能车辆上,以实现车车的实时通信及自动跟车。其系统总体构成如图1所示,由智能车载单元、高精定位模块、车载智能传感器、专用短程 DSRC通信设备、底层控制器、执行机构等组成。
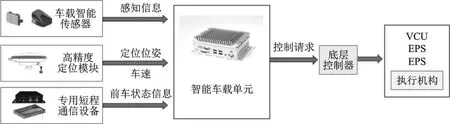
图1 自动跟车系统硬件构成图
智能车载单元内嵌车车(Vehicle-to-Vehicle,V2V)通信协议框架[3],通过DSRC通信设备实时接收前车关键状态信息,同时通过自车通信协议接收自车的高精定位信息以及车载传感器获取到的感知信息,进行前车识别与关键消息构建等,进而进行自动跟车控制算法实时运算并依次传输至底层控制器和执行机构,实现实时的自动跟车控制。
DSRC通信设备在网络传输层可利用用户数据报协议(User Datagram Protocol, UDP)使用网口与上位机进行通信,实现车车之间实时通信[4]。其结构如图2所示。

图2 基于DSRC的V2V通讯系统
1.2 自动跟车软件系统结构
自动跟车软件结构如图3所示,其包含感知层、控制层和执行层。
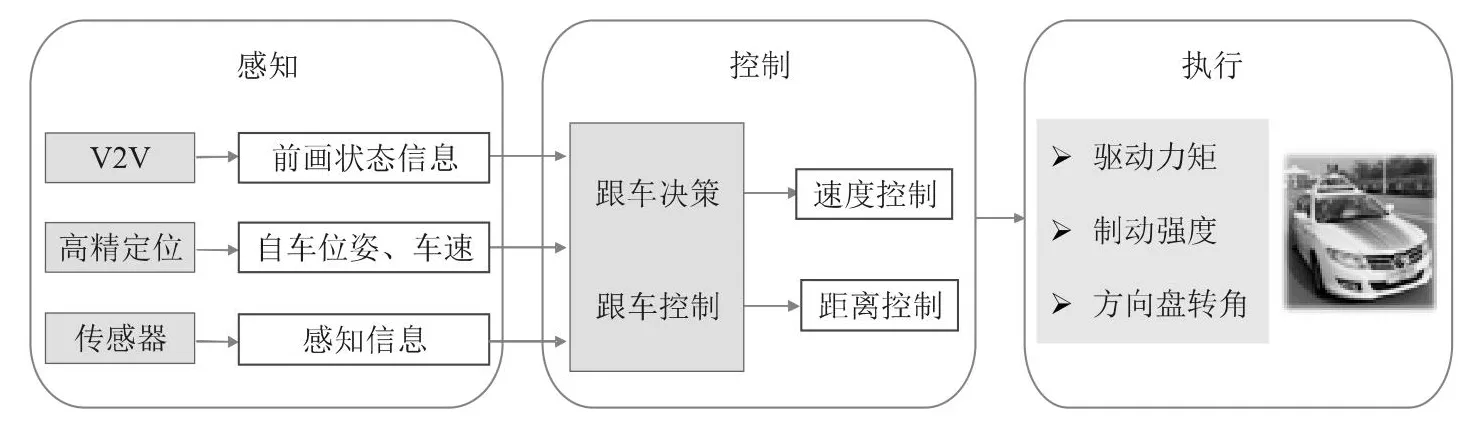
图3 自动跟车软件系统结构图
感知层软件包括对自车传感器的感知信息处理、高精度定位系统的定位信息获取以及V2V的实时信息交互,接收和处理 DSRC通信设备传输的前车位姿信息、车速、航向角、加减速度、制动情况、转向情况等前车关键状态信息。
控制层软件根据感知层信息进行跟车决策和自动跟车控制,对速度和距离等参数进行控制,以控制自车以一定车速和安全距离自动安全地跟随前车行驶。最后将控制量传输至底层执行层,执行跟车控制请求指令。
2 自动跟车控制算法策略
自动跟车控制算法策略主要依据车车协同运动模型搭建,如图4所示,自车通过感知和V2V与前车进行信息交互,与前车保持一定的安全距离,以一定车速和加减速度紧凑且安全地自动跟随前车行驶[5]。其中,ddes为跟车距离;vego和aego分别为自车的车速和加速度;vlead和alead分别为前车的车速和加速度。
根据上述车车协同跟车模型,依次进行期望跟车距离决策和期望跟车速度规划,进而完成自动跟车控制。
2.1 期望跟车距离决策
根据驾驶经验和驾驶规律,跟车距离与车速正相关,根据自车当前车速判断决策出期望跟车距离[6]:
式中,ddes为期望跟车距离;vego为自车当前车速;tgap为跟车时间阈值,通常取值在1~2 s之间,可根据不同驾驶员风格变换调整;dmin为最小安全距离。
2.2 期望跟车速度规划
为保证跟车安全且使自动跟车拟人化,期望跟车车速与期望跟车距离、两车相对距离有关,并依据不同跟车工况设置权重系数加权调整,期望跟车车速如下:
式中,vxf为接收到的前车车速;vset为自车设定的巡航车速;ddes为期望跟车距离;df为自车与前车相对纵向距离;κ1为前车车速权重系数,根据不同的跟车工况和前车加减速情况进行动态取值;σ1为自车设定巡航车速权重系数,其取值为0或1,根据前车加减速情况及相对距离进行判断取值。
2.3 跟车控制
在决策规划出期望跟车距离和期望跟车速度后,采用上下双层控制器的分层式结构进行跟车控制,如图5所示,通过搭建上层、下层控制算法策略来实现自动跟车控制。
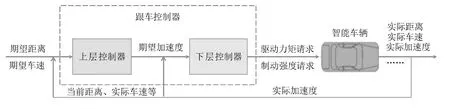
图5 分层式结构跟车控制
上层控制器需根据期望车速与实际车速之间的偏差以及距离偏差等控制量实时计算得到期望加速度,传递到下层控制器进一步控制。在上层控制器中,主要为速度控制,采用比例-积分-微分(Proportion-Integral-Differential, PID)控制实时计算期望加速度:
式中,ades(k)为期望加速度请求;e(k)为控制输入,即期望跟车车速与实际车速的误差;Kp、Ki、Kd分别为比例控制、积分控制和微分控制增益;z为离散时间因子。
下层控制器根据上层输出的期望加速度请求先判断车辆应驱动加速还是进行制动减速,然后分别调用驱动控制器和制动器。
下层驱动控制器采用基于纵向动力学的前馈力矩控制和PID力矩反馈控制。根据车辆纵向动力学得到的前馈力矩为
式中,m为车辆整备质量;ades为期望加速度;θ为道路坡度;Faero为空气阻力;Fr为滚动阻力;rw为车轮半径;TFF为得到的前馈力矩。
反馈控制是将期望加速度与车辆实际加速度的偏差进行PID控制得到反馈控制力矩:
式中,eax为加速度偏差量;kp、ki、kd分别为比例控制、积分控制和微分控制增益;TFB为得到的反馈控制力矩。
最终得到的自动跟车驱动扭矩为
3 实车测试验证
为了验证基于 DSRC技术的自动跟车控制策略的有效性,基于某款自动驾驶改装后的运动型多用途汽车(Sport Utility Vehicle, SUV)车型,搭载 DSRC通信设备,开展直线和蛇形工况相结合的自动跟车实车试验。
试验工况为前车以 40 km/h依次行直线和蛇形道路轨迹,自车跟随前车进行自动跟车控制,该工况的行驶轨迹如图6所示。
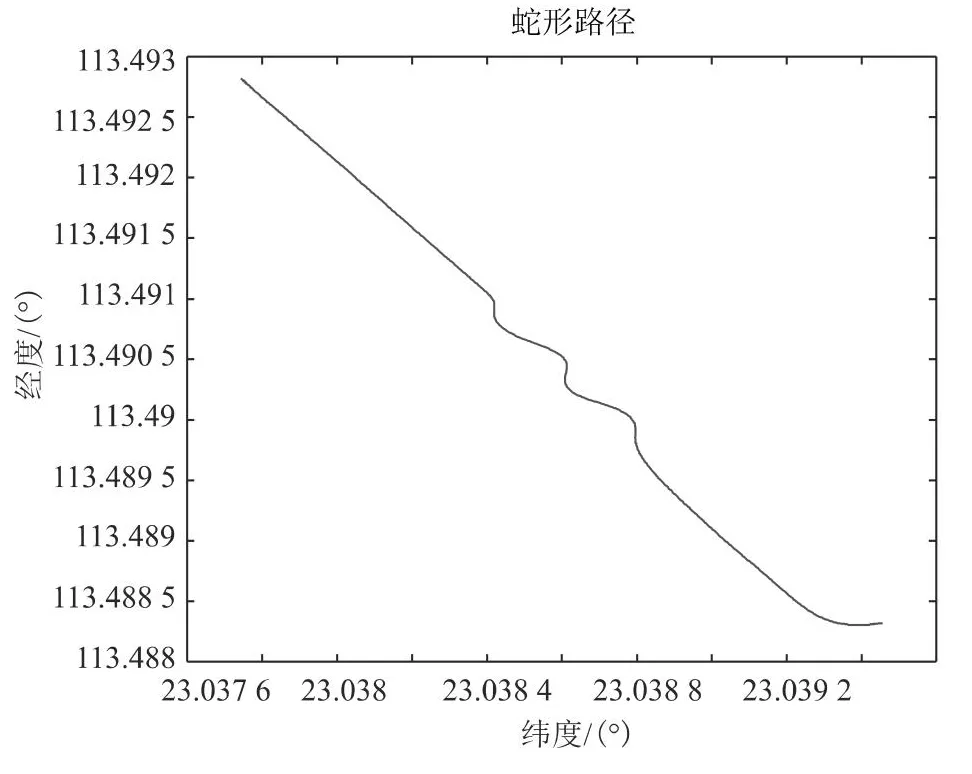
图6 实车试验工况行驶轨迹
自车自动跟车结果如图7所示,展示了两车车速、启停距离、两车间距以及安全距离等之间的关系及变化曲线,将跟车过程分成五个阶段,以此分析整个自动跟车过程的有效性和合理性。
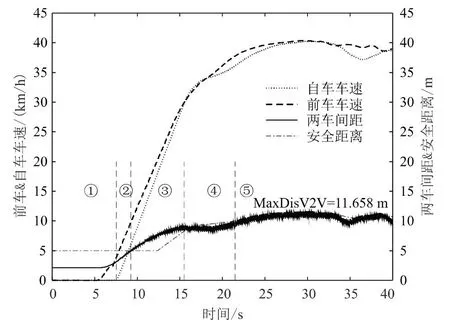
图7 自动跟车结果
从试验结果看出,在第一阶段跟车启停阶段中,两车初始间距为2.12 m,小于启动距离即最小安全距离3 m,自车不启动。当前车开始起动,进入跟车第二阶段,当前车车速增大到两车间距大于起动距离后,满足自动跟车启动条件,自车开启自动跟车控制,加速跟随前车,但由于此时前车车速大于后车车速,两车间距进一步增大。当间距增大到大于安全距离,进入跟车第三阶段,自车自动跟车不断加速,两车间距不断迫近于安全距离;进入跟车第四阶段,两车间距在安全距离范围波动,此时自车在自动加减速跟随前车以调整两车间距使其不断接近安全距离;当进入第五阶段后,两车间距趋近于安全距离达到稳定跟车状态,两车车速相近,自车在安全距离范围内自动跟随前车行驶,依次完成直线和蛇形轨迹的自动驾驶。在整个跟车过程中,两车间距最大值为11.658 m,而此时安全距离为11.17 m,间距接近且大于安全距离,安全且紧凑跟车。
对比此次基于 DSRC的自动跟车与没有用DSRC通信技术的常规巡航跟车的最大间距结果,如表1所示。可以看出,结合DSRC通信技术的自动跟车最大间距显著减小,表明 DSRC跟车队列更紧凑稳定。

表1 跟车过程最大间距对比结果
从上述实车试验结果看出,基于 DSRC技术的自动跟车控制可有效实现自动跟车功能,能有效地控制自车与前车保持在预期安全距离内自动跟车行驶,整个跟车过程表现稳定合理且跟车紧凑,且在蛇形复杂工况中也能保证跟车安全,验证了基于 DSRC技术的自动跟车控制策略的有效性。
4 结论
本文搭建了自动跟车系统的硬件和软件系统架构,建立了基于专用短程通信技术的自动跟车控制策略,依次完成期望跟车距离决策、期望跟车速度规划和自动跟车控制算法设计,开展实车试验,结果表明自车可有效合理地自动跟随前车进行自动驾驶跟车行驶,既保证了安全跟车,又保证一定通行效率,可为车车协同辅助驾驶和智能巡航控制等提供一定的理论基础。
猜你喜欢
测试技术学报(2023年2期)2023-04-06 04:38:30
控制与信息技术(2021年2期)2021-07-23 01:11:10
汽车维护与修理(2018年1期)2018-04-04 01:13:22
电信科学(2016年11期)2016-11-23 05:07:41
爆笑show(2016年3期)2016-06-17 18:38:17
人民交通(2016年9期)2016-06-01 12:19:39
儿童绘本(2016年6期)2016-05-14 14:37:16
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33
警察技术(2013年1期)2013-03-20 14:11:16
