
基于MATLAB的纯电动汽车动力性仿真分析
2023-05-22 03:56:36冶存良
汽车实用技术 2023年9期
李 凯,冶存良,刘 彬
(宁夏理工学院 机械工程学院,宁夏 石嘴山 753000)
随着世界科技革命和产业变革进程加快,能源短缺、环境污染等问题受到越来越多的重视。为应对环境问题、促进绿色发展,发展新能源汽车是一项行之有效的战略[1]。目前由于纯电动汽车具有无污染、结构简单和能量转换率高的优势,其已成为新能源汽车的重点发展方向。动力性作为纯电动汽车重要性能之一,进行纯电动汽车动力性仿真,对提高纯电动汽车设计水平、促进新能源汽车的发展有重要意义。
本文以比亚迪某纯电动汽车作为研究对象,选取最高车速、加速能力和爬坡能力作为动力性评价指标,根据新能源汽车理论和依靠MATLAB软件强大的计算及数据分析能力,选取车型相关实际参数(如表1所示),采用MATLAB编写车辆动力模拟仿真程序,对纯电动汽车动力性进行分析,获得动力性仿真曲线,进而分析影响电动汽车动力的主要因素。

表1 整车主要技术参数
1 纯电动汽车动力模型建立
1.1 电动汽车行驶方程
纯电动汽车的动力性主要取决于电动汽车驱动力和行驶阻力,电动汽车的驱动力和传统燃油车来源不同,电动汽车的驱动力主要来自电机的输出转矩。电动汽车驱动力计算公式为
式中,Ft为电动汽车驱动力;Te为电机输出转矩,it为总传动比;ηt为传动效率;r为滚动半径。
电机输出转矩和转速之间有一定的关系,这也是电动汽车动力性计算的主要依据。电机输出转矩的计算公式为
式中,Pe为电机高速功率;Tc为电机低速功率;n为电机转速;nb为电机基速。
电动汽车的行驶速度计算公式为
式中,u为电动汽车的行驶速度;r为滚动半径。
纯电动汽车在行驶过程中受到的阻力主要有滚动阻力、空气阻力、坡道阻力和加速阻力[2]。电动汽车滚动阻力与轮胎行驶单位距离能量损失有关,是轮胎和路面的变形引起的。滚动阻力计算公式为
式中,Ff为滚动阻力;m为电动汽车整车质量;f为滚动阻力系数;αG为坡度角;g为重力加速度,取g=9.8 m/s2。
电动汽车的空气阻力和行驶速度、迎风面积和空阻系数有关,计算公式如下:
式中,Fw为电动汽车空气阻力;CD为电动汽车空阻系数;A为电动汽车迎风面积;u为电动汽车的行驶速度。
电动汽车行驶过程中遇到上坡,需要克服重力沿坡道方向的坡道阻力,计算公式为
式中,Fi为电动汽车受到的坡道阻力。
加速阻力是指电动汽车在正常行驶中加速行驶时要克服的汽车本身质量加速运动时的惯性力,计算公式为
式中,Fj为电动汽车加速阻力;δ为电动汽车的旋转质量换算系数。
由式(1)—式(7)可知,电动汽车克服行驶阻力行驶的动力学方程为
通过式(8)进而可以求得汽车动力性能的三大评价指标,分别是最高车速、加速能力和最大爬坡度[3]。
1.2 电动汽车最高车速
电动汽车最高车速和传统燃油汽车的最高车速定义类似,在不考虑风速的条件下,电动汽车在平坦路面上行驶所能达到的最大车速为最高车速umax,此时电动汽车电机处于恒功率区间运行,驱动力和滚动阻力保持平衡[4]。电动汽车能达到的最高车速越高,则表明其动力越强。根据式(5)可得到电动汽车最高车速为
上述情况下驱动力曲线与滚动阻力-空气阻力之和曲线有交点,交点所对应的车速就是电动汽车的最高车速。
当电动汽车驱动力大于滚动阻力和驱动力之和时,电动汽车的最高车速由电机的决定,这种情况下驱动力曲线与滚动阻力-空气阻力之和曲线没有交点[5]。电动汽车最高车速的计算公式为
式中,nmax为电机最大转速。
1.3 电动汽车加速能力
电动汽车在平坦路面上行驶的加速度aj根据式(7)可求得
电动汽车的加速能力是指电动汽车的速度从u1加速到u2所耗费的时间,时间越短说明电动汽车的加速能力越强。计算公式为
式中,t为电动汽车加速时间。
1.4 电动汽车爬坡能力
电动汽车的爬坡能力用其满负载情况下在良好不颠簸路面匀速行驶的最大爬坡度来表征,爬坡角度越大,说明电动汽车的爬坡能力越强[6]。
2 程序设计和仿真分析
2.1 纯电动汽车动力性仿真程序设计
根据建立的式(9)—式(12)纯电动汽车动力模型,使用MATLAB软件编写纯电动汽车动力性仿真程序并运行,求得比亚迪某电动车型的最高速度、加速时间和最大爬坡度,并输出仿真图形。
2.2 纯电动汽车仿真分析
在MATLAB R2022a编译器中输入程序并运行,计算得到该型纯电动汽车的最高车速为189.10 km/h,加速时间为 7.90 s,最大爬坡度为38.46%。输出的该型电动汽车驱动力-行驶阻力平衡图、加速时间曲线和爬坡度曲线分别如图1—图3所示。
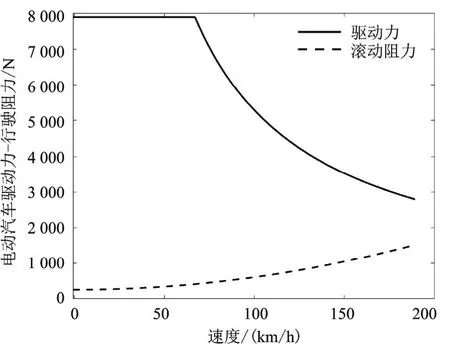
图1 驱动力-行驶阻力平衡图
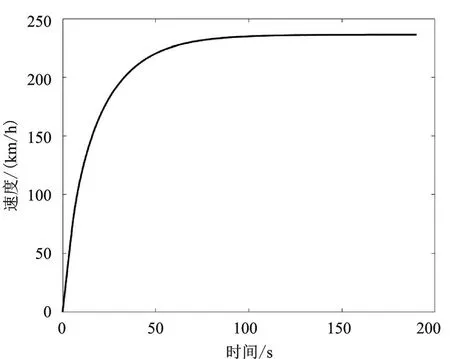
图2 加速时间曲线
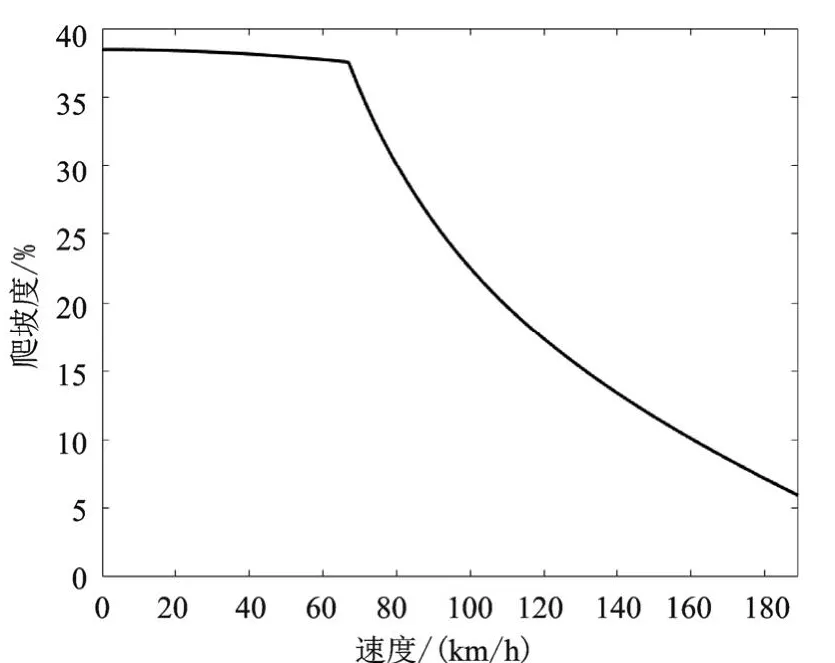
图3 最大爬坡度曲线
3 纯电动汽车动力性影响因素分析
3.1 最高车速的影响因素分析
最高车速的影响因素主要有电机峰值功率、整车质量和空阻系数等。当车辆满载且运行在平坦路面时,最高车速umax所对应的电机峰值功率Pm为
由式(9)可得空阻系数CD和最高车速umax之间的关系为
根据式(13)—式(14),编写电机峰值功率和空阻系数对该型电动汽车最高车速影响的MATLAB程序,运行得到该型电动汽车最高车速与电机峰值功率和空阻系数这二者关系的仿真曲线,如图4和图5所示。

图4 最高车速和峰值功率关系曲线

图5 最高车速和空阻系数关系曲线
由图4可以看出电机峰值功率越大,电动汽车的最高车速越高。从图5可以看出空阻系数越大,电动汽车的最高车速越小。
3.2 加速能力的影响因素分析
电动汽车的加速能力由其百公里加速时间来表征,编写电机峰值功率和空阻系数对电动汽车加速能力影响的MATLAB程序,运行得到该型电动汽车最高车速与电机峰值功率和空阻系数这二者关系的仿真曲线,如图6和图7所示。
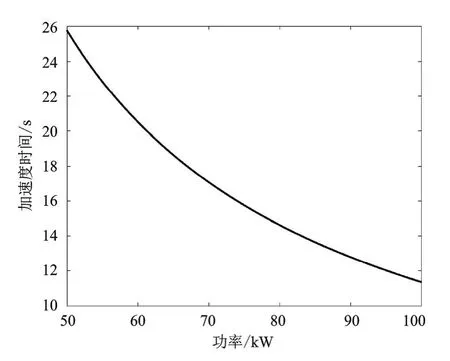
图6 加速时间和峰值功率关系曲线
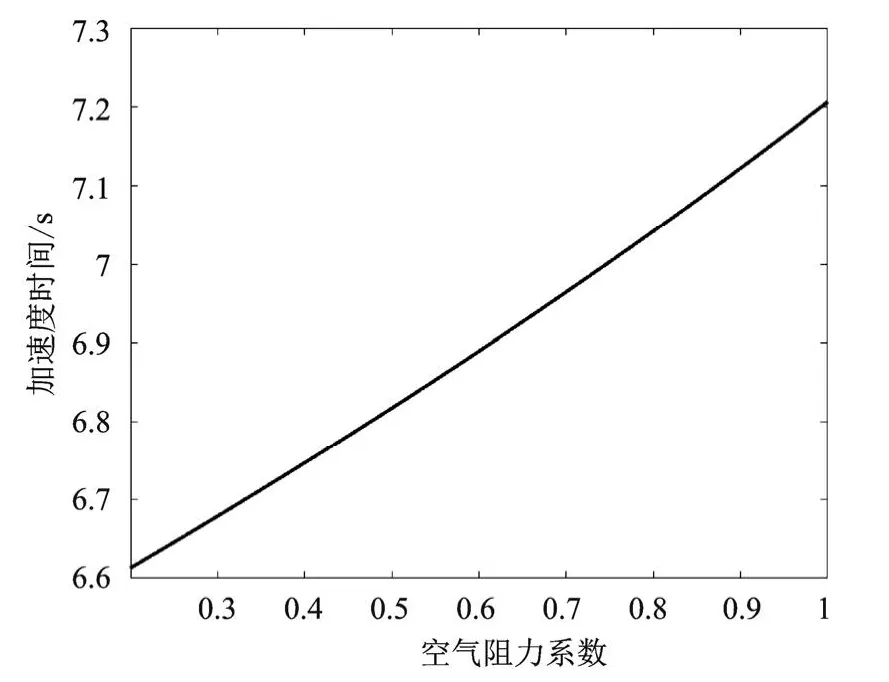
图7 加速时间和空阻系数关系曲线
由图6可以看出电机峰值功率越大,电动汽车的加速时间越短,加速能力越强。从图7可以看出空阻系数越大,电动汽车的加速时间越长。
3.3 爬坡能力的影响因素分析
电动汽车的爬坡能力由其最大爬坡度进行表征,编写在三种不同的行车速度下,电机峰值功率和空阻系数对电动汽车爬坡能力影响的MATLAB程序,运行得到该型电动汽车最高车速与电机峰值功率和空阻系数这二者关系仿真曲线,如图8和图9所示。

图8 最大爬坡度和峰值功率关系曲线
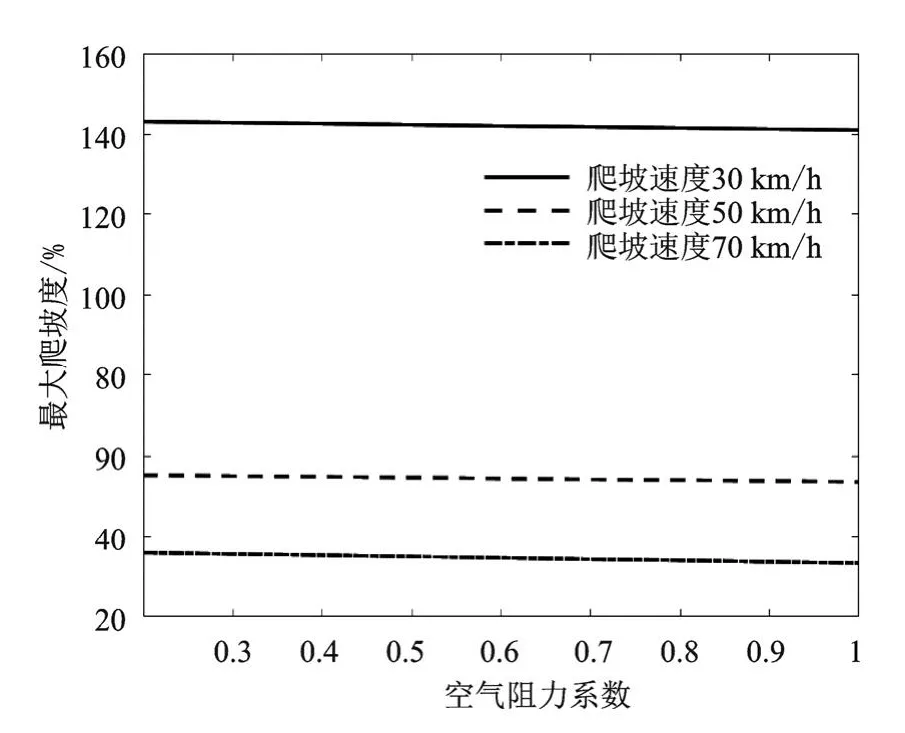
图9 最大爬坡度和空阻系数关系曲线
由图8可以看出在一定车速下电机峰值功率越大,电动汽车的最大爬坡度越高,其爬坡能力越强;在一定的峰值功率条件下,电动汽车的速度越高,其对应的最大爬坡度越高。由图9可以看出在一定车速下空阻越大,电动汽车的最大爬坡度越低,其爬坡能力越弱。
4 结论
根据纯电动汽车动力学理论,针对具体车型建立电动汽车动力性模型,并利用MATLAB计算分析程序,得到在日常工况下纯电动汽车的最高车速、加速时间和最大爬坡度,并绘制电动汽车动力性仿真曲线。最后具体分析电车峰值功率和空阻系数对汽车动力性的影响。通过该模型能够为纯电动汽车动力性设计提供理论依据,同时该模型具有广泛的适用性,更改相关基础参数就可以实现不同车型、不同条件下的动力性分析,为今后研究纯电动汽车动力性能提供了有价值的参考。
猜你喜欢
汽车实用技术(2022年4期)2022-03-07 03:47:42
昆明医科大学学报(2021年12期)2021-12-30 07:00:16
英语文摘(2020年10期)2020-11-26 08:12:12
中学生数理化·八年级物理人教版(2018年3期)2018-05-31 08:52:46
上海师范大学学报·自然科学版(2018年3期)2018-05-14 13:47:10
汽车维护与修理(2018年1期)2018-04-04 01:13:22
广西科技大学学报(2016年1期)2016-06-22 13:10:38
实用手外科杂志(2015年4期)2015-08-27 01:54:08
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33
