增强现实抬头显示器视觉解释类型对自动驾驶系统用户接受度的影响
2023-05-20 01:30李卓童先顺田慧溢刘星辰
图书情报知识 2023年2期
李卓童先顺田慧溢刘星辰
(1.武汉理工大学艺术与设计学院,武汉,430070;2.武汉大学信息资源研究中心,武汉,430072)
1 引言
自动驾驶早已与人工智能深度绑定,人工智能技术的快速迭代让人们看到了实现自动驾驶的希望[1],不仅为投资市场带来新的动力,也为自动驾驶领域带来了热切的关注。得益于感知和决策算法等AI核心技术的突破,自动驾驶能够为用户带来全新的人智交互体验[2]。然而,全新的交互体验并不都能为发展助力,糟糕的人智交互体验会让用户的期望落空进而无法信任自动驾驶,甚至转而质疑且拒绝接受自动驾驶技术[3]。因此,如何提高用户的人智交互体验对自动驾驶的未来发展和战略布局至关重要。
目前多数不好的用户体验是由于用户不能理解AI提供的解释或说明信息,无法与AI进行有效交互[4],这将导致用户对自动驾驶的接受度偏低,不愿进一步了解、使用且购置智能汽车。而增强现实抬头显示器(Augmented Reality Head-Up Display,AR-HUD),能够以不同的解释类型为用户提供车辆状态和环境反馈的信息,提高自动驾驶系统的可理解度和透明度,是目前最具应用前景的人智交互界面之一。
将AR-HUD应用于自动驾驶的交互过程,需要考虑具体的交互设计以及用户体验评估。以往研究通常采用可用性测试、自我报告、问卷调查等方法来评估用户体验,但以上方法存在主观性强、无法确定因果等不足,而受控实验可以精准地度量用户体验,得到明确的因果关系。此外,结合实验驱动设计(Experiment-Driven Design,EDD)的理念,通过度量用户体验得到的结论可以更具针对性地优化自动驾驶的交互设计,提高用户接受度和用户体验,最终形成智能产品迭代优化的良好循环。
因此,本研究采用受控实验,结合ErgoLAB驾驶模拟系统平台来探究不同环境可见度条件下采用何种AR-HUD视觉解释类型能够提高用户对自动驾驶系统的接受度。具体而言,采用3(视觉解释类型:图标/文本/无)×2(可见度:高/低)的被试内实验设计探究用户接受度,其中视觉解释类型为自变量,可见度为调节变量,用户对自动驾驶系统的接受度为因变量。
2 相关研究
2.1 自动驾驶系统的用户接受度
自动驾驶的用户接受度是指潜在用户和广大公众对自动驾驶新技术的态度和期望[5]。用户接受度是决定系统成败的关键因素之一,有效了解和测量技术接受度对于系统设计人员至关重要[6]。Zhang等人结合自动驾驶技术的特性,将信任和感知风险(即感知安全风险和感知隐私风险)整合到技术接受模型(Technology Acceptance Model,TAM)[7]框架中,提出了自动驾驶技术接受模型。该模型认为,感知有用性和感知易用性是用户能否接受自动驾驶的两个重要因素,而信任是促进自动驾驶接受的关键决定因素,与感知有用性一起决定用户使用自动驾驶的意图,同时,感知安全风险会对自动驾驶接受产生负面影响[8]。
2.2 自动驾驶中AR-HUD的视觉解释类型
AR-HUD是将增强现实技术与抬头显示器结合的信息显示系统,它可以将导航中的视觉符号以及对路面行人、车辆等障碍物的立体识别信息叠加到驾驶员前方的道路视野中,与现实的交通状况进行融合,增强对提取信息的注意力[9]。在人智交互界面中,ARHUD的视觉解释类型包括图标、文本等[10],图标具有指示性、普遍性和多样性特征,是人们约定俗成的意象载体,而文本通过其内在含义来传递基础信息,可以对信息进行描述、指引和补充。例如Wintersberger等人在自动驾驶模式下分别使用颜色编码的三角形和箭头图标来警示临近的交通对象,发现AR-HUD警示可以提高用户对自动驾驶的接受度和信任度[11]。Kim等人提出了一种新的AR-HUD呈现方式,即通过虚拟阴影界面向驾驶员警示前方的障碍物,结果证明,这种方式有效提升了驾驶员对危险情境的感知以及缩短了驾驶员决策和响应的时间[12]。Walch等人设计了一种AR-HUD视觉警示方式,将文本解释应用其中,发现这是一种提示驾驶员接管自动驾驶汽车的有效办法[13]。
认知负荷理论(Cognition Load Theory,CLT)认为,用户的认知资源有限[14],如果内在认知负荷和外在认知负荷的总量超过了用户的认知资源,将会造成认知负荷过载,严重影响用户的交互体验。其中内在认知负荷与当前认知任务的复杂性有关,外在认知负荷与认知对象的信息呈现及组织形式有关。对应于人智驾驶交互中,视觉解释类型是影响外在认知负荷产生的重要因素,不当的视觉解释类型往往会引发额外的认知消耗[15-16],增加用户的风险感知水平,降低用户对自动驾驶系统的接受度[8,16-17]。Ekman等人发现相较于包含详细解释的高透明解释类型,用户更偏好或更能接受消耗较低认知资源的中等透明度解释类型[18]。
2.3 环境可见度对自动驾驶用户的影响
任务的环境因素,比如可见度、噪声或震动等,会增加任务的复杂度,提高用户的内在认知负荷[19-20]。可见度是指观察者离前方物体多远时仍能清楚地看见该物体[21]。可见度受环境光照强度、天气状况等因素的影响[22-23],可见度高的环境包括晴朗天气、白天等,可见度低的环境包括雨天、雪天、浓雾等恶劣天气以及黑夜等。在不同可见度环境下,解释类型对用户自动驾驶接受度的影响可能不同。有研究发现低可见度的雪夜环境中,用户偏好简单直观的解释类型,因为低可见度增加了用户的感知风险,此时系统呈现直观的解释类型,会提高用户接受度;而在高可见度的晴朗白天环境下,用户偏好详细的解释类型,因为高可见度环境下用户的感知风险较低,可以处理详细的信息,系统给用户提供较复杂的归因解释类型更能提高用户接受度[17]。
不同于外在认知负荷,在人智驾驶交互过程中,内在认知负荷主要受到任务复杂度影响,在驾驶过程中属于基础的认知消耗[20,24]。而恶劣的环境,比如较低的可见度会显著增加驾驶任务的复杂度,从而提高用户的内在认知负荷水平。Konstantopoulos等人发现,相比于晴朗的白天,在下雨天和夜间行驶时,驾驶员的认知负荷水平明显提高,面对潜在危险时需要更长的反应时间来应对[19]。
2.4 研究评述与研究问题
对相关研究梳理后发现,首先,以往研究评估用户接受度的方法中存在随机误差大和测量工具主观性强等方面不足,主要体现在没有严谨的实验设计、没有对参与者进行随机抽样并分配、没有可复制的固定实验流程以及没有对额外变量严格控制等方面。其次,AR-HUD的视觉解释主要分为图标和文本两种类型,以往研究在对视觉解释类型的影响上只是对有无某种类型进行了比较,而不同视觉解释类型之间对比的影响还不得而知。最后,已有研究发现可见度作为影响用户感知体验和认知加工进程的重要环境变量会影响用户接受度[17],但AR-HUD作为人智交互载体时,可见度的具体影响还需进一步探究。为了填补以上研究空白,本研究结合认知负荷理论并采用受控实验旨在解决以下研究问题:
RQ1:为了提高用户对自动驾驶系统的接受度,人智驾驶交互中应该采用何种视觉解释类型?
RQ2:人智驾驶交互中环境可见度是否会调节视觉解释类型对用户接受度的影响?
3 研究方法
3.1 实验参与者招募
本研究通过在社交媒体上发布在线广告来招募参与者。共招募到61名有驾驶经验的参与者,其中2名参与者无法察觉到不同解释类型的区别,因此其数据被剔除,最终得到59名参与者的有效数据,包括29名男性和30名女性,年龄介于18-28岁之间。所有参与者在实验开始前均自愿签署了知情同意书,并在实验结束后被给予了相应的报酬。本研究经武汉理工大学研究伦理委员会批准,并严格遵循一般伦理准则。
3.2 实验任务与材料设计
参与者需要在实验中模拟驾驶自动汽车共行驶3千米,约15分钟。在自动驾驶过程中,自动驾驶系统会根据测算与前车的实时距离自动减速。具体驾驶情境是,参与者乘坐的汽车在前方无车辆以80km/h的速度行驶100米后,前方出现一辆车,本自动驾驶汽车以80km/h的速度稳定接近前方车辆,在距离前方车辆50米时开始自动减速以保持安全距离,同时在ARHUD的屏幕上出现系统的减速解释,10秒后前方车辆加速驶出驾驶视线。
SCANeR是ErgoLAB驾驶模拟系统平台中配套的自动驾驶仿真软件,SCANeR™studio提供构建虚拟场景所需的工具和模型:道路环境、车辆模型、真实/虚拟司机、天气条件和场景脚本等。本研究使用SCANeR制作原始视频材料,参与者通过观看视频的方式来模拟自动驾驶行车过程。
本实验中设置了3种AR-HUD的视觉解释类型,分别为图标解释、文本解释、无解释。图标解释是通过方框和渐变色块对前方障碍物的方位进行锁定,用可视化图标显示实时距离的方式对自动驾驶系统的减速行为进行解释;文本解释是通过文本的方式对自动驾驶系统的减速行为作出解释;无解释作为空白对照无任何显示。
设置了2个水平(高/低)的可见度。在行车情境中,外部光线的强弱会显著影响可见度的高低[22],因此选用中午12时的白天作为可见度高的情境,夜晚22时的黑夜作为可见度低的情境。
通过对跟车场景的视觉解释类型和可见度进行不同的设计,制作了6份不同的视频材料,每个视频拥有一种视觉解释类型和一种可见度条件的组合,时长均为2分钟,视频截图如图1。

图1 视频材料Fig.1 Video Materials
3.3 自动驾驶系统接受度测量
本研究采用Zhang等提出的自动驾驶接受模型。为了量化AR-HUD视觉解释类型对用户自动驾驶系统接受度的影响,在预实验中借鉴Zhang等提出的接受度量表,包含7类,23个测度项[8],同时,参考已有研究中技术接受度量表,以提高各因子题项的内容效度。预实验结果发现,“感知隐私风险”与本研究问题相关度较低,因此在正式实验中剔除“感知隐私风险”,将影响自动驾驶系统接受度的因素分为感知有用性、感知易用性、信任度、感知安全风险、态度、行为意愿6类。本研究的自动驾驶系统接受度问卷包括6个因子,20个测度项,均采用Likert 5点量表形式,1(非常不同意)-5(非常同意),具体见表1。最后对感知安全风险的三个测度项进行反向评分,并通过所有项目的总分计算用户接受度的平均评分,分值越高代表接受程度越高。

表1 测度项及参考依据Table 1 Measurement Items and the References
3.4 实验程序
在实验开始前,每位参与者需要完成前测问卷,包括参与者的性别、年龄以及驾驶经验等基本信息,参与者对自动驾驶汽车的了解以及对自动驾驶汽车的态度等信息。
本实验流程为,首先告知参与者实验要求和基本流程。讲解完毕后,参与者进入驾驶模拟器内,参与者需要模拟体验所有驾驶情境,即观看6段不同实验条件的视频。实验中参与者每观看完一段视频,都要填写一份关于自动驾驶系统接受度的测量问卷。任务完成后,参与者被要求填写后测问卷来进行对自变量的操纵性检验,调查参与者是否发现AR-HUD不同视觉解释类型的区别。为了减少任务次序对参与者的影响,实验采用拉丁方设计对6段视频的播放顺序进行轮换。最后进行实验后访谈,整个实验时长约30分钟。
4 结果分析
4.1 描述性统计
前测信息问卷统计分析如表2所示,招募的所有参与者均有驾驶经验,从驾驶频率来看,极少驾驶(N=44,74.58%),偶尔驾驶(N=13,22.03%),经常驾驶(N=2,3.39%);从对自动驾驶汽车态度来看,过半参与者持积极态度(N=33,55.93%),部分参与者持中立态度(N=23,38.98%);从接触自动驾驶汽车的经历来看,大部分参与者没有接触(N=41,69.49%),小部分参与者少量接触(N=18,30.51%)。
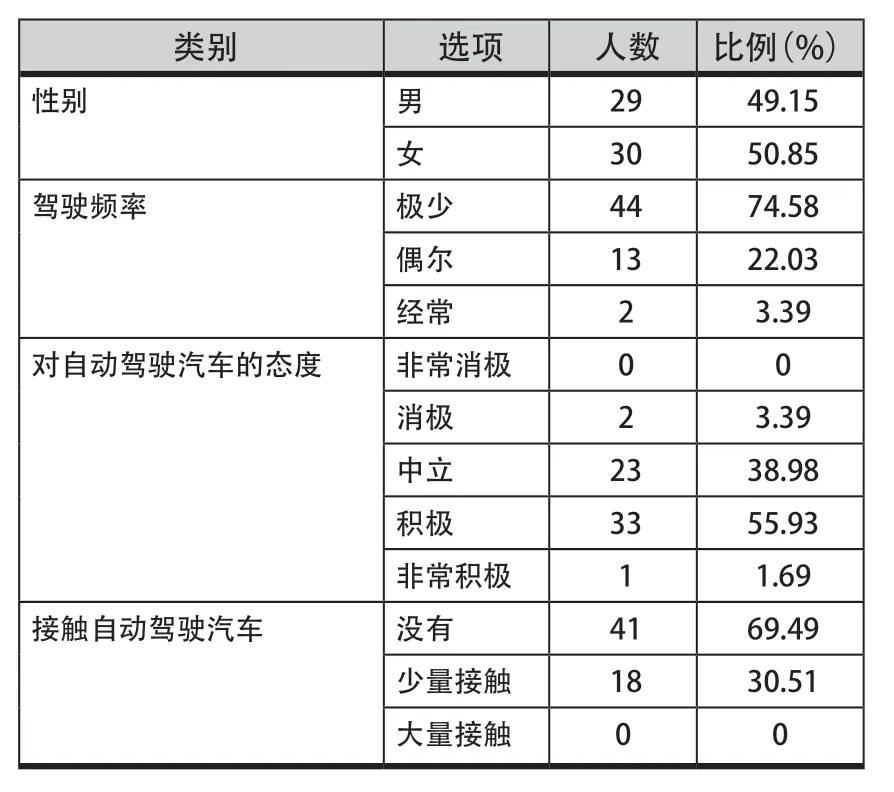
表2 描述性统计分析Table 2 Descriptive Statistical Analysis
4.2 问卷信效度检验
对实验的59个有效数据进行信度分析,利用Cronbach α系数检验潜在变量测度项的内部一致性,Cronbach α系数越高说明量表的可信度越高,且Cronbach α系数不能低于0.7[28]。结果如表3所示,6个因子的Cronbach α系数均大于0.7,说明该研究所采用的问卷具有较高的信度。为评估量表的有效性,进行确认性因素分析(CFA)。结果显示,所有项目的标准化因子负荷都高于0.5。6个因子也都符合收敛效度的标准(CR>0.7,AVE>0.5)。达到鉴别效度,因为AVE的平方根高于构面之间的相关度[29]。
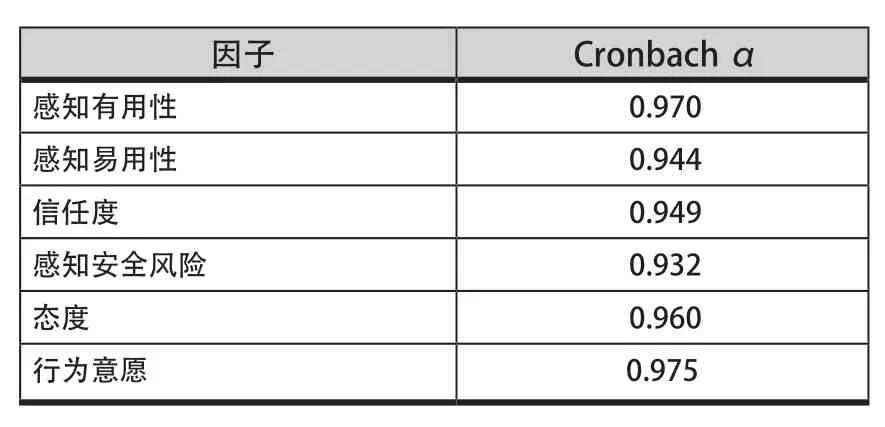
表3 问卷信度分析Table 3 Reliability Analysis of Questionnaire
4.3 用户先验经验对自动驾驶系统接受度的影响
为了分析“驾驶频率”和“对自动驾驶汽车的态度”是否会影响用户对自动驾驶系统接受度,本研究根据基本信息将参与者分别分为2组,采用t检验来检验其对用户接受度的影响。根据“驾驶频率”分为“低频组(N=44,74.58%)”和“高频组(N=15,25.42%)”;根据“对自动驾驶汽车的态度”分为“积极组(N=34,57.63%)”和“消极组(N=25,42.37%)”。
根据t检验结果发现,“驾驶频率”对用户接受度无显著影响(p=0.137),低频组(M=3.050)与高频组(M=2.858)对用户接受度的影响无显著性差异;“对自动驾驶汽车的态度”对用户接受度无显著影响(p= 0.362),积极组(M=3.045)和消极组(M=2.941)对用户接受度的影响无显著性差异。
4.4 AR-HUD视觉解释类型对自动驾驶系统用户接受度的影响
本研究采用重复测量方差分析来检验参与者在不同AR-HUD视觉解释类型中对自动驾驶系统接受度是否存在显著差异,测量结果如下。
参与者在不同视觉解释类型中对自动驾驶系统接受度存在显著差异(F=128.429,p=0.000<0.05)。接着对不同视觉解释类型进行成对比较,结果如表4所示,三种视觉解释类型之间均存在显著差异(p<0.05)。

表4 视觉解释类型成对比较结果Table 4 Pairs Compare Results of Visual Explanation Types
从图2可以看出,参与者从图标解释中对自动驾驶系统的接受度最高(M=3.823,SD=0.572),其次是文本解释(M=3.264,SD=0.682),无解释对参与者自动驾驶系统的接受度最低(M=1.908,SD=0.810)。
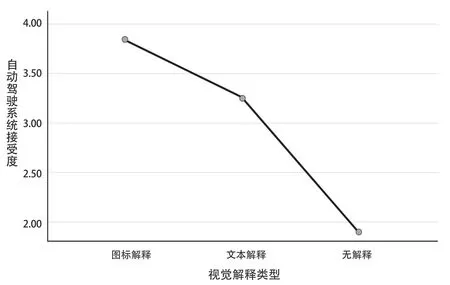
图2 视觉解释类型对参与者自动驾驶系统接受度影响Fig.2 Effect of Visual Explanation Types on Participants' Acceptance of Autonomous Driving System
对自动驾驶系统接受度的6个因子进行重复测量方差分析,如表5所示。在感知安全风险中,AR-HUD的不同视觉解释类型对用户的感知安全风险具有显著差异(关系从大到小依次为,无解释/文本解释/图标解释);在剩余5个因子中,AR-HUD的不同视觉解释类型对各个因子同样具有显著差异(关系从大到小依次为,图标解释/文本解释/无解释)。
首先确定全自动钢印打印所需运动方式,即证件必须正确堆放在固定区域,由抓手抓住证件,而后将证件准确送到钢印机打印位置,完成后打印后退回原位,抓手将证件通过另一方向移动将证件移至证件摆放区,松开抓手,抓手原位返回继续抓住第2个证件,重复上述动作,最终
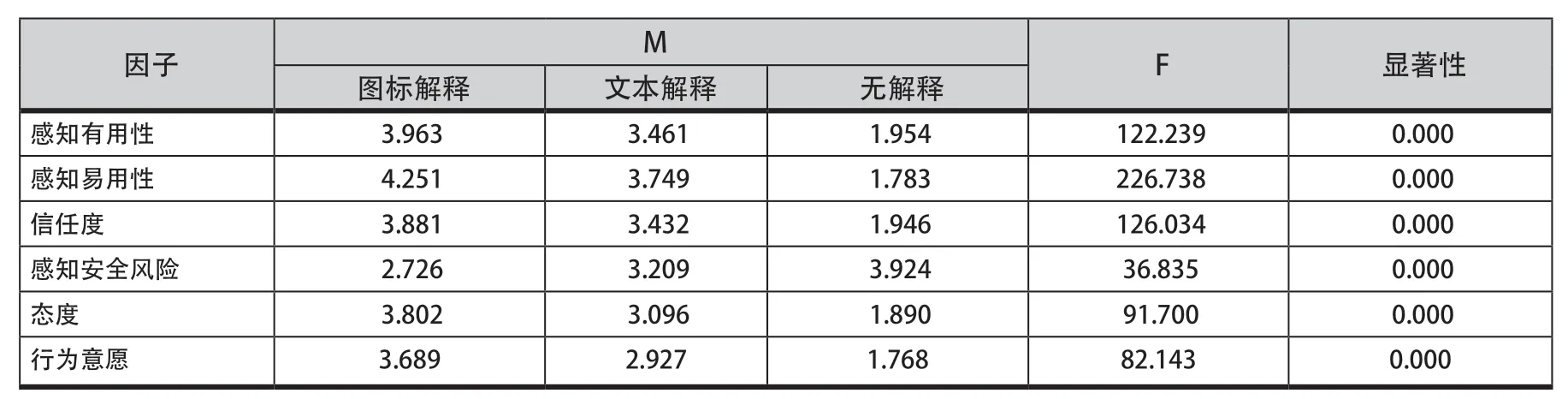
表5 6个因子的重复测量方差分析Table 5 Repeated Measure ANOVA with 6 Factors
4.5 环境可见度的调节作用
本研究采用重复测量方差分析来检验环境可见度是否显著调节视觉解释类型对参与者自动驾驶系统接受度的影响。
环境可见度不能显著影响视觉解释类型对参与者自动驾驶系统接受度的作用(p=0.715>0.05),ARHUD视觉解释类型与环境可见度的交互情况见图3。
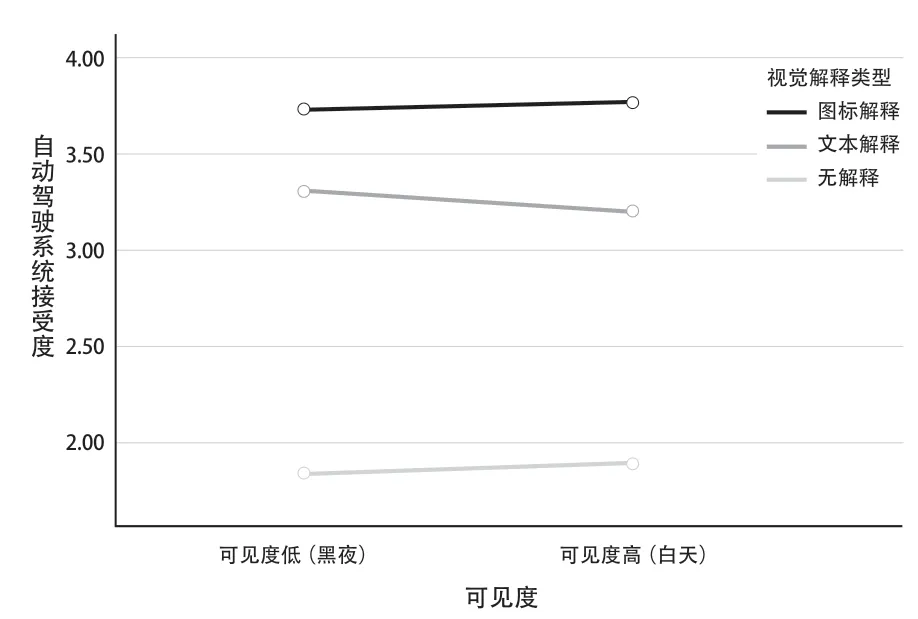
图3 视觉解释类型与可见度的交互关系Fig.3 The Interaction Between Visual Explanation Types and Visibility
5 讨论
5.1 AR-HUD 视觉解释类型影响用户接受度
根据实验结果,回答提出的第一个研究问题:在人智驾驶交互中,AR-HUD的不同视觉解释类型在影响用户对自动驾驶系统的接受度上具有显著差异,图标和文本两种视觉解释类型都显著提高了自动驾驶系统的用户接受度,且图标解释要显著高于文本解释。
首先,与无解释相比,有解释可以显著提高用户对自动驾驶系统的接受度。这与现有研究结果一致,当有解释突出显示前方障碍物时,有助于用户掌握自动驾驶汽车的行为决策,降低不确定性,从而提升用户对自动驾驶的信任度和接受度[11,30]。
其次,与文本解释相比,采用图标作为视觉解释类型时,用户对自动驾驶系统的接受度显著更高。具体而言,相比于文本解释,采用图标进行解释时,用户的感知有用性、感知易用性以及行为意愿都更高,且感知安全风险较低,说明用户更倾向于图标解释。同样,实验后的访谈中大多数参与者表示图标解释这种呈现形式更为直观、易理解,而文本解释的信息量密集,会降低识别速度。然而,以往关于行人对自动驾驶汽车界面的感知研究中发现文本解释比表情、光效等形式更能表达汽车对行人的意图[31]。
出现本研究结果的原因可能是:(1)可视化图标比文本解释类型更能提高系统透明度[32-33]。根据XAI理论,XAI关键在于透明,提高系统透明性可以增加驾驶员信任度[4],进而提高对自动驾驶系统的接受度[8],所以在用户接受度上,图标解释优于文本解释。(2)通常情况下,图标比文本解释类型更能降低驾驶员的外在认知负荷,所消耗的认知资源更少[34]。根据认知负荷理论,在驾驶环境中,驾驶员的认知资源有限,认知资源的过多消耗会提升感知风险水平,进而降低用户对自动驾驶接受度[8,17],所以在用户接受度上,图标解释优于文本解释。
5.2 环境可见度的调节作用
根据实验结果,回答提出的第二个研究问题:在人智驾驶交互中,环境可见度在视觉解释类型影响用户对自动驾驶的接受度上不存在显著调节作用。这与现有研究结论不一致,现有研究发现,在低可见度环境中,倾向简单解释类型,而在高可见度环境中,用户更倾向具有详细信息的归因解释类型[17]。本实验中设置的白天和黑夜两种可见度环境没有发现显著的调节效应,原因可能是,一方面,由于实验条件有限,无法逼真地构建两种可见度环境,可能无法有效操纵两种实验条件[23];另一方面,可见度环境的设置不同可能会影响调节效果,现有研究为拉大不同可见度环境的差异性,设置了晴朗白天和雪天黑夜两种可见度环境[17],而本研究设置的是白天和黑夜两种可见度环境,所以环境可见度的影响结果可能不同。
6 结论与展望
6.1 结论
本研究基于认知负荷理论,探究两种可见度条件下采用何种AR-HUD视觉解释类型能够提高用户对自动驾驶系统的接受度,得到如下结论:
(1)AR-HUD的三种视觉解释类型在影响用户对自动驾驶系统的接受度上存在显著差异,采用图标作为视觉解释类型时用户对自动驾驶系统的接受度最高;其次是文本解释;而无视觉解释类型时用户对自动驾驶系统的接受度最低。
(2)环境可见度不存在显著的调节作用,两种可见度条件没有观察到显著的调节效应。
6.2 研究价值
本研究具有重要的理论意义:(1)丰富了自动驾驶中AR-HUD和用户接受度的实证研究。以往关于自动驾驶接受度研究大多基于公众的视角,并从宏观角度探究公众对自动驾驶的态度、了解程度、支付意愿、使用偏好等。本研究聚焦于用户视角,对可能影响自动驾驶系统接受度的AR-HUD视觉解释类型进行比较和论证,增强了自动驾驶系统接受度研究的科学性。(2)提供了应用用户体验度量的实证研究,说明了采用受控实验解决跨领域实际设计问题的可行性和适用性,展现了实施度量用户体验过程中图情领域的学科优势。(3)提供了采用用户体验度量来优化智能产品设计的新思路,为未来图情与设计领域开展学科交叉的系列研究提供了应用案例。
同时本研究具有重要的实践意义:(1)本研究结合仿真软件和实体模型创建了相对真实的自动驾驶场景,并对自动驾驶系统的用户接受度实现了量化观测,研究结果对人智驾驶交互中AR-HUD的界面交互设计具有指导意义。(2)本研究考虑了环境因素中的可见度,探究可见度对自动驾驶交互设计的影响,为未来人智驾驶交互设计方向提供借鉴。
6.3 研究展望
本研究也具有一定的局限性:首先,由于环境限制,无法构建真实的可见度环境,未来可以优化实验的环境变量,提高生态效度;其次,实验样本的选取具有一定偏差,本实验样本均为在校大学生,他们更愿意主动接受新技术且对自动驾驶技术的总体态度较为积极,未来研究可以扩大样本范围;再次,有6名参与者在事后访谈中提到解释界面中图标透明度会影响观看和理解,未来人智交互界面研究中,可以针对AR-HUD界面元素进行设计优化;最后,本实验采用了问卷法来测量用户接受度,未来可以结合客观的行为和生理数据进一步探究用户的交互体验过程和心理机制。
作者贡献说明
李卓:提出研究思路,设计研究方案,论文最终版本修订;
童先顺:撰写论文,处理、分析数据,论文最终版本修订;
田慧溢:撰写并修改论文,论文最终版本修订;
刘星辰:收集与梳理文献,收集实验数据。
支撑数据
支撑数据由作者自存储,E-mail:txshun@whut.edu.cn。
1.童先顺, 刘星辰. User questionnaire data.xlsx. 用户问卷数据.
猜你喜欢
体育科技文献通报(2022年3期)2022-05-23
学生天地(2020年5期)2020-08-25
计算机应用文摘(2019年24期)2019-05-30
计算机应用文摘·触控(2019年24期)2019-01-08
现代营销(创富信息版)(2018年10期)2018-10-12
电子测试(2018年10期)2018-06-26
电影评介(2016年24期)2017-01-04
汽车博览(2016年9期)2016-10-18
华人时刊(2016年13期)2016-04-05
读者(2015年13期)2015-05-14