
一种胶带机防爆巡检机器人的研究与应用
2023-05-18 13:07牛得草
中国科技纵横 2023年4期
牛得草
(甘肃华亭煤业集团有限责任公司,甘肃平凉 744100)
0.引言
华亭煤矿煤流运输主要采用采区胶带机+采区煤仓+2501 胶带机+石门胶带+集中煤仓+主井提升+地面设施组成,2501 胶带机为矿井主要煤流运输设备,运输长度达2000m。
2501 胶带机安全正常运行是矿井正常生产的保障。然而许多煤矿胶带机在运行过程中,由于巡检不到位,发生过托辊损坏、滚筒打滑、煤仓堆煤、胶带跑偏、驱动滚筒超温、胶带纵撕、胶带接头断带、火灾等多种事故,对巡检员和机电设备的安全造成很大的隐患和问题,并且胶带机工作巷道内环境恶劣,粉尘大照明不好,不利于巡检工及时发现问题,同时,受人员生理、心理素质、技能水平等因素的限制,人工巡检的过程风险、漏检风险较大。因此,矿井研发应用胶带机防爆巡检机器人,不仅能将巡查人员从煤尘噪音大的恶劣工作环境中替换出来,保障了巡检工的生命和健康,而且能及时发现胶带机运输过程中出现的各种隐患问题,避免事故继续扩大,极大降低了胶带机的非正常故障停机时间,实现胶带机保护全流程全面的监护,实现了胶带机由零散的点巡检到机器人360 度面巡检,对煤矿长周期安全高效生产具有特别重大的意义。
结合华亭煤矿生产系统现状,在2501 胶运大巷皮带机采用巡检机器人代替皮带巡检工,提升矿井生产自动化程度,实现减人提效,保障矿井运输系统安全高效生产。
1.煤矿防爆巡检机器人发展状况
近年来,机器人技术在国内矿山生产中已有应用,其中山西阳煤集团一矿应用智能巡检机器人,400 多个数据通过现场工作的传感器两小时采集传回到监控室,替代了两名巡检运维人员携测量设备徒步两天多才能完成的工作量;陕煤集团神南产业柠条塔矿从2015 年、内蒙古龙王沟矿从2017年均使用巡检机器人,实现大巷胶带巡检等。
目前,各种巡检机器人已在多个领域中应用,随着机器人智能化水平提高,推动着它在多个恶劣的环境中崭露头角,推动它在应用领域的市场前景越来越广。它在多种场合发挥着作用,如矿山的辅助运输系统、交通运输系统、排水系统、变电所等。机器人需要沿着固定的轨道进行巡视,机器人巡检最大的特点是可以在没有人看管的情况下能自动自觉出色地完成工作,尤其是替换掉恶劣环境场所的工作人员,优秀地完成日常巡视所要求的规定内容[1]。这样一来,机器人不但减轻了技术员工作量,而且经济效益明显。
2.技术方案和建设内容
如果在皮带巷道安装巡检机器人不是连续爬坡,我们使用固定轨道巡检机器人。固定轨道自行走型机械传动系统主要包括工型钢轨道、驱动电机、减速器、驱动轮、支撑轮、张紧机构、万向节、柔性吊挂锁、轨道连接部件等组成,如图1 和图2 所示。
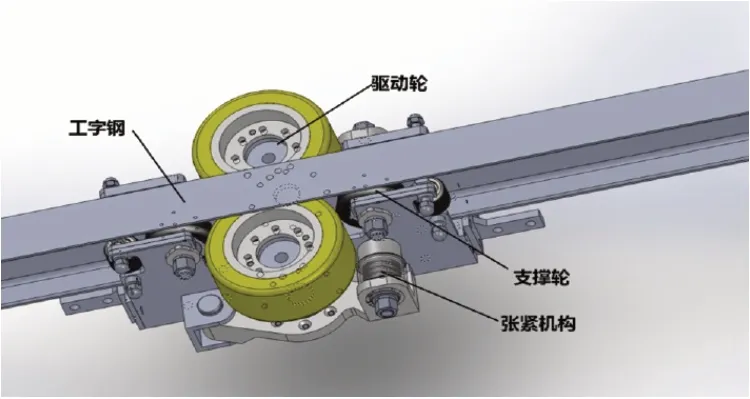
图1 爬坡图

图2 安装效果图
2.1 机器人功能
移动图像采集功能:在低照度、高湿度和粉尘环境下,通过机器人本体上搭载的多个摄像头实现对整个巷道内全景的图像采集,包括皮带机、缆线、管路、机电设备等,图像在防爆控制显示箱显示并存储,通过对图像的解析,确定胶带机带机是否存在隐患问题、损坏程度、隐患位置、是否需要停机检修、以及有无违章操作等情况。
声音采集功能:实时采集巷道内的声音,经网络实时传输至机头的防爆控制显示箱播放并存储。皮带机在运行过程中,故障部位往往产生较明显的声音异常,通过对采集的声音进行分析,判断皮带机是否异常,从而达到及时发现故障、避免故障扩大的目的。
烟雾检测功能:机器人本体上搭载有烟雾传感器,有烟雾时,会产生报警。
温度探测:托辊等部位磨擦或胶带打滑等故障引起胶带机摩擦部位温度升高,本产品采用红外温度探测仪,快速检测皮带机温度,无接触、无磨损。
防爆控制显示箱上留有与皮带机控制系统的通讯接口,出现故障时可以紧急停止皮带机的运行。
巡检机器人身上留有快速通讯接口,快捷地集成多种具有标准通讯接口的检测仪器,以实现对胶带机巷道机电设备部位数据的特定检测和传输。
机器人控制系统接入工业以太网环网,可以实现调度监控中心对胶带机设备各项数据的远程监视和传输。
2.2 装置的特点
卓越的空间和环境适应性:根据所用场所的不同选择合适的传动机构,大倾角使用钢丝绳牵引式,平巷及小倾角使用轨道式,不影响胶带机沿线的正常行人和设备的维护等工作。采用先进的本安型无线移动通讯技术,通过设置基站,构建了皮带机巷道内的无线移动通讯网络,该网络可以接入到矿井的整个网络,实现互联互通,机器人本体在基站间移动时,可以自动、透明地从一个接入点移动到下一个接入点,实现数据的无缝移动切换,既具有一定的带宽保证图像、数据等的实时传输,又符合防爆要求。
解决了防爆环境下移动设备的能源供应及井下快速能源补充的技术难题,闭锁功能设计齐全,有效防止不安全的误操作或者违规行为,机器人系统实现了工作能源的安全、快捷供给,不需在井下现场更换电池或者拿到地面充电[2]。
解决了胶带机巷道内设备监护位置信息采集、异常声音采集、图像数据的采集、传输与存储,尤其是在移动过程中采集声音和图像,并且是在高粉尘、低照度、高温、高湿等极端恶劣环境下,保证了图像和声音的准确和有效性。
机器人控制、显示、操作系统集中于一体,多种运行方式,人机界面科学合理,操控简单,系统保护齐全,控制系统选用PLC 和大屏幕工控机,界面显示形象逼真内容丰富,实时显示胶带机图像、巷道内图像、机器人本体运行位置和速度、电量、电流、温度等数据。系统整机功耗低,传动效率高,符合节能减排的要求。
2.3 系统组成
巡检机器人装置构造主要由不锈钢本体、传动系统、无线通讯系统、防爆充电器、防爆控制显示箱等。机器人采用大容量动力锂电池组供电,满足工作期间的用电量,采用防爆充电器实现井下快速充电。在调度室监控界面实时显示整个胶带机运行工况,机器人沿着铺设的固定轨道往复移动,胶带机运行时采集胶带机沿线各项监控数据,并通过搭建的基站无线网络传输到防爆控制显示箱,准确可靠地实现报警或者停机,保证胶带机安全高效的运转。
2.3.1 无线通讯系统
无线通讯系统主要包括防爆电源、本安型基站、定向天线、分线盒、光缆等。本安型基站功能是搭建无线通讯网络平台(允许国际标准的无线设备接入网络),保证系统中防爆控制显示箱和机器人之间的信息数据传输。由于巷道内依据情况安装一定数量防爆基站,保证了通讯系统通畅、稳定可靠。务必要保证通讯系统稳定可靠的运行,无线带宽达到140M 以上,既要高清视频流畅清晰,也要支持别的无线设备的联网访问的需求。无线通讯系统因无旋转部件接触设计,避免了磨损,相比有线连接的网络视频系统,可以支持系统更长久地稳定运行,降低成本。
2.3.2 机器人本体
机器人采用流线型设计,不锈钢结构体积小重量适中,既保持长期美观性,也能在恶劣的煤矿井下环境中工作。它是完成各种巡检任务进行数据采集与上传的主角,搭载有摄像机、拾音头、补光灯、红外温度传感器、烟雾传感器等探测装置,胶带机运行时在传动系统的驱动下,沿着固定轨道往复移动进行全面的监护。胶带机设备部位异常时,故障部位通常会产生明显的异常声音,通过音频采集,分析研判是否需要报警或者停机;低照度宽动态摄像机具有防尘、防水、抗振等功能,采集的图像及相关数据能实时反映胶带机运行的真实工况,及时发现隐患和故障;搭载的红外温度探测仪,可以准确地测量出设备表面温度,快速检测胶带机部件的温度变化,提前预防事故发生;烟雾传感器实时动态监测胶带机巷道内的烟雾浓度,达到报警值时及时有效地向防爆控制显示箱发出报警指令[3]。机器人内部电路采用大容量动力锂电池组供电,工作期间节能降耗解决移动设备拖动电缆供电不便的问题,确保机器人一次充电后能连续工作16h 以上,保证安全生产的巡检时间。
2.3.3 防爆充电器
防爆充电器用于机器人本体内部高能量动力锂电池组充电,充电时间大约4h,采用防爆设计,整机有如下优点:实现了机器人自动的快速充电,不需在井下工作现场更换电池并拿到地面充电;结构紧凑体积小重量轻,采用快速插接头,操作安全快捷;防止误操作设计了充电闭锁功能,具有宽电压输入范围功能,发热量小充电效率高,防止温升导致设备高温失效失控等问题。
2.4 安装方案
轨道自行走装置对安装空间的要求:
巡检仪部分(轨道自行走型):1000mm×315mm×556mm(长×宽×高)。
矿用皮带机巡检机器人装置的安装主要分为电气安装和传动系统的安装,电气安装非常简便,传动系统的安装相对复杂一些,从理论上来说传动系统可以安装在非行人巷道侧和皮带机支撑架上等位置,具体安装位置需要依据现场情况而定,不管如何选安装位置,原则上绝不能影响人员安全和其他设备正常安全的运转,务必要有利于机器人能够采集尽可能多的现场数据,如图3 所示。
2.5 针对顺槽皮带的处理方式
针对顺槽皮带机越采越短的问题,我们建议皮带机尾的工字钢轨道保留,每次缩短距离,移动它的前一根,因为在末端最后一根轨道上固定了充电桩以及限位开关,安装充电桩及限位开关较为麻烦,但是更换这根轨道是较理想的方式,充电桩的线缆随着皮带的缩短,逐渐盘起,如图4 所示。
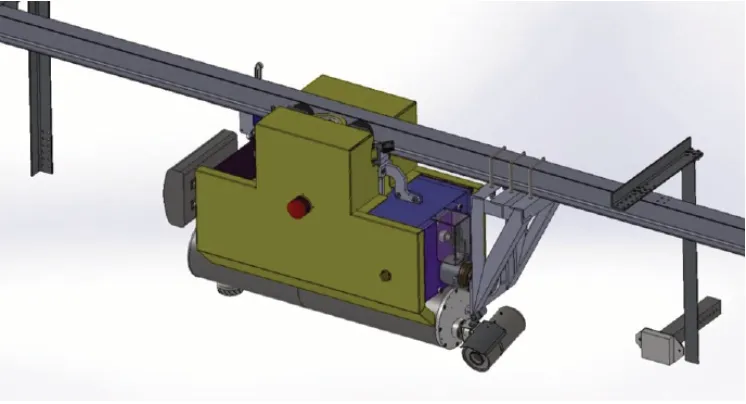
图4 顺槽安装图
3.结语
3.1 安全效益
防爆巡检机器人既能将巡检工从煤尘大、噪音大、湿度大的恶劣工作环境中替换出来减轻了巡检工的的劳动强度,保证了巡检工安全和健康,又能提高巡检工作质量和降低了设备的事故率;实现了胶带机保护全流程监护,实现了胶带机由零散点巡检到机器人360 度面巡检,对矿井长周期安全高效生产具有特别重大的意义。
3.2 经济效益
通过防爆巡检机器人系统的巡检,不但对机电设备故障进行超前研判预控,减少了机电设备非正常停机故障时间,提高了机电设备的安全生产效率,而且降低了机电设备事故造成的经济损失,并且延长了设备使用寿命。巡检机器人可以在不同类型的场景大力推广使用,减少巡检工达到减员增效的目的,降低人员成本及安全成本,创造可观的经济效益。
猜你喜欢
陕西煤炭(2022年6期)2022-12-20
矿产勘查(2020年9期)2020-12-25
世界有色金属(2018年14期)2018-10-10
科技与企业(2016年6期)2016-05-30
江西煤炭科技(2015年1期)2015-11-07
有色冶金设计与研究(2015年5期)2015-05-15
山西焦煤科技(2015年7期)2015-02-28
同煤科技(2015年2期)2015-02-28
河南科技(2014年23期)2014-02-27
河南科技(2014年19期)2014-02-27
