自适应图像水印系统的设计与研究
2023-05-08 03:01谢建宏刘亦叶
计算机应用与软件 2023年4期
谢建宏 刘亦叶
(南昌大学信息工程学院 江西 南昌 330031)
0 引 言
随着信息技术的飞速发展和互联网等传播媒介的普及,包括图片、音频、视频等在内的网络数字媒体得到广泛应用,版权保护已经成为一个重要而迫切的现实问题[1]。数字水印技术,作为数字媒体版权保护的有效办法,已经在国内外引起人们极大的兴趣,并成为国内外研究的热点[2-3]。
当前数字水印技术的研究大都围绕水印的鲁棒性、不可见性等因素进行,然而水印的不可见性与鲁棒性是互相矛盾的两方面[4]。在载体信息中嵌入更多的水印信息,则水印系统抗攻击的性能得到提升,鲁棒性增强,然而不可见性会变差;反之如果嵌入的水印信息较少,则不可见性较好,但含水印的载体数据受到些许干扰时可能很难提取出水印信息,鲁棒性随之变差。如何平衡这对矛盾是设计数字水印必须面对和解决的重要问题[5]。围绕该问题,自适应水印技术的研究应运而生,其目的是实现对水印的嵌入强度、嵌入位置等随载体信号各部分特性的不同而自适应地嵌入,以解决数字水印的不可见性与鲁棒性的均衡问题,并尽可能实现算法较低的复杂度,增强算法的实用性。迄今已有大量不同的自适应水印算法[6-8],大多数研究在于提升嵌入水印信息的不可见性和增强抵抗水印攻击的鲁棒性,然而数字水印在不可见性和鲁棒性两者之间仍旧难以取得较优均衡,水印算法的复杂度与实用性有待进一步优化,这也是当前水印算法设计应用过程中遇到的主要瓶颈。
围绕数字水印的不可见性与鲁棒性的均衡问题,本文基于离散小波变换,设计一种自适应图像水印系统,根据人类视觉系统的亮度掩蔽特性,优化水印的嵌入位置及嵌入强度因子,实现水印的自适应嵌入,并对水印系统性能进行评价。
1 系统设计框架
为实现对水印的嵌入强度、嵌入位置等随载体图像信号各部分特性的不同而自适应地嵌入,并解决数字水印的不可见性与鲁棒性的均衡问题,本文设计了一种自适应图像水印系统,该系统主要包括自适应图像水印的嵌入、图像水印的提取、系统的实现与性能评价三大功能模块。自适应图像水印的嵌入模块又包括载体图像的小波变换、小波子块划分、水印嵌入位置的选取、自适应嵌入强度的计算、水印图像的反色处理、水印图像的Arnold置乱等子功能模块。图像水印的提取模块又包括含水印图像的小波变换、载体图像的小波变换、小波子块划分、水印信息的提取、水印信息的反Arnold置乱、水印信息的反色处理等子功能模块。系统的实现与性能评价模块主要包括算法的Matlab编程与实现、自适应性评价、鲁棒性与不可见性评价等子功能模块。该自适应图像水印系统的具体功能框图如图1所示。

图1 自适应图像水印系统功能框图
2 自适应图像水印的嵌入
2.1 嵌入位置的选取
不同的载体图像具有不同的特性,其不同部分的轮廓、纹理、能量大小也不尽相同。载体图像经过小波分解[9]后得到低频近似分量LL、高频水平细节分量LH、高频垂直细节分量HL、高频对角细节分量HH。低频近似分量LL是原始图像的逼近子图像,这部分可以继续分解,而其他三个高频细节分量主要表征原图像分别在水平、垂直、对角线方向的轮廓和纹理等边缘细节信息。
如果将水印嵌入到经过小波变换的载体图像的高频部分,根据人类视觉系统的纹理掩蔽特性,水印嵌入后不易被人眼察觉。但由于高频部分信息占整个图像数据的比例一般非常低,容易受外来因素如噪声、滤波、几何变换的干扰,稳定性较差,嵌入的水印信息很容易丢失,鲁棒性不强。因此,高频部分(LH、HL、HH)不进行水印嵌入。由于二级小波分解后的低频部分LL2与其他同级高频部分相比,小波系数相对更大,意味着这部分占据了图像大部分能量,在低频部分LL2嵌入水印,信息不易丢失,具有很强的鲁棒性。因此,本文将水印嵌入到二级小波分解后的低频部分LL2。
2.2 自适应嵌入强度的计算
低频部分LL2代表了包含轮廓等信息的平滑部分,人眼对这部分的改变极为敏感,嵌入的水印强度如果不经过处理,很容易使原图像的质量下降,产生失真。根据人类视觉系统的特性,选取适当的水印嵌入强度因子,并且能够根据不同图像内容进行自适应的调节,同时满足嵌入水印强度低于人类视觉系统(Human Visual System,HVS)的临界不可见门限[10],以保证水印系统的鲁棒性和不可见性。
由于一幅图像不同区域的亮度和纹理复杂程度等特征不同,所以临界不可见门限也有差别。为了充分利用这一差别,本文对载体图像嵌入水印的区域进行分块处理,在水印信息嵌入之前,计算包括嵌入位置在内的周围一个区块的亮度平均值,再根据人眼亮度感觉和对比灵敏度阈值等参数确定嵌入水印强度因子的大小。
对比灵敏度阈值又称韦伯比[11],其计算方法如下:
(1)
式中:B是背景亮度,ΔB是在背景上叠加的亮度。对于不同亮度的背景,人眼能够察觉到的亮度变化阈值也不同。研究表明,一般情况下,k=0.018是人眼刚好能够分辨出的亮度变化极限值。当曝光过强或不足时,背景越亮或越暗,此时k可达到0.05或更大,水印嵌入强度可适当提高。
同时,水印嵌入强度的大小与水印的平均像素值有关。水印图像平均像素值越高,其嵌入到载体图像后的可见性越高,为满足不可见性要求,则相应的嵌入强度要越低。为了保证高平均像素值的水印图像也能具有尽可能大的嵌入强度,即满足鲁棒性要求,则需对水印图像进行反色预处理,具体为:若水印图像平均像素值大于127,则对任意像素值x,将其像素值修改为255-x,否则像素值不变。
设水印嵌入强度为α,水印经过反色预处理后的像素最大值为127,对应嵌入水印的载体图像区域像素亮度平均值为A,则在平滑区嵌入水印时,应满足:
(2)
由此可得水印嵌入强度最大值为:
(3)
由韦伯-费希纳定律[12],人眼对某一子块的主观亮度感觉S(心理量)与该子块背景的客观平均亮度B(物理量)的对数成正比,公式表述如下:
S=KlgB+K0
(4)
式中:K是常数,是引起主观差别感觉的相对强度,K0是积分常数,通常K0=0。B越大或越小,即子块平均亮度与128这个中间像素值的差的绝对值越大,则嵌入的强度越大。为满足嵌入水印的不可见性,式(4)中的常数K取通过韦伯比计算出的基本嵌入强度因子α0,最终确定嵌入强度因子计算公式如下:
α=α0×lg(|A-128|+10)
(5)

2.3 嵌入算法
对载体图像进行二级小波分解后,在低频小波系数LL2中随机选择N×N(水印图像大小)个系数嵌入经过反色和Arnold置乱预处理的水印信息,具体嵌入算法如下:
(1) 对低频小波系数LL2划分为适当的子块,如25×25个子块(若无法保证按方块均匀划分,可以选取适当的矩形块状划分)。
(2) 计算每一子块的像素亮度平均值A,根据不同的亮度平均值计算出每一子块最合适的嵌入强度α,公式如下:
(6)
(3) 基于人类视觉系统HVS的亮度掩蔽特性,若水印亮度值越大,则应嵌入背景亮度越接近极值的子块。据此,从亮度角度对载体图像的小波子块平均亮度和反色处理后的水印图像像素值大小分别划分为亮、暗、较亮、较暗四类,水印图像像素值大的水印信息(亮的)随机嵌入背景亮的小波子块中,以此规则类推得到如图2所示的嵌入方式。
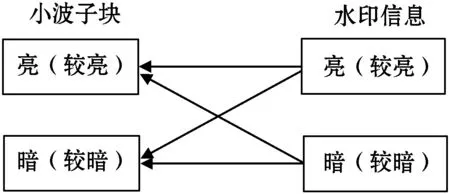
图2 小波子块和水印信息亮度分类后的嵌入方式
(4) 对每一个小波子块都按已知自适应强度因子嵌入对应的水印信息,本文采用加法准则的嵌入方式,嵌入公式为:
F′(x,y)=F(x,y)+α·Wa(x,y)
(7)
式中:α为自适应强度因子,Wa(x,y)是反色置乱后的水印在(x,y)位置的信息,F(x,y)为小波子块的原始小波系数,F′(x,y)为嵌入水印后的小波系数。
将经过以上操作的图像的小波系数进行离散小波逆变换即可得到嵌入水印后的图像,完整的自适应水印嵌入算法流程如图3所示。

图3 自适应水印嵌入算法流程
该嵌入算法实现的核心MATLAB程序代码为:
ntimes=23;
%密钥1,Arnold置乱次数
rngseed=59433;
%密钥2,随机种子数
flag=1;
%显示中间图像
[Iw,psnr]=setdwtwatermark(I,W,ntimes,rngseed,flag);
%水印嵌入
%%水印嵌入函数setdwtwatermark.m
function[Iw,psnr]
=setdwtwatermark(I,W,ntimes,rngseed,flag)
%I为载体图像,W为水印图像,Iw为添加了水印信息的图像,psnr为峰值信噪比,越大则说明水印质量越好。
3 图像水印的提取


图4 水印提取算法流程
该提取算法实现的核心MATLAB程序代码为:
ntimes=23;
%密钥1,Arnold置乱次数
rngseed=59433;
%密钥2,随机种子数
flag=1;
%显示中间图像
[Wg,nc]=getdwtwatermark(Iw,W,ntimes,rngseed,flag);
%水印提取
%%水印提取函数getwatermark.m
function[Wg,nc]
=getdwtwatermark(Iw,W,ntimes,rngseed,flag)
%Iw为添加了水印信息的图像,W为原始水印,用于计算相关性,Wg为提取出的水印,nc为相关系数。
4 系统性能评价
本文实验平台:Windows 7+Matlab R2015b。载体图像:scenery.jpg(2 048×1 448)、trailer.jpg(1 024×684)、office_5.jpg(960×600)。水印图像:nculogo.png(244×244, 5.74 KB)、badge.jpg(348×348, 29.5 KB)、logo.tif(122×108, 1.28 KB)、ncu_1.png(86×86)。
4.1 性能评价指标
对数字水印系统受攻击后的性能进行评价,既可以利用人类感知系统进行定性评价,也可以利用相关标准进行定量评价。论文采用以下两个指标对水印系统性能进行评估与分析。
(1) 峰值信噪比(Peak Signal to Noise Ratio,PSNR)[13]:
基于现代金融服务的ATM机、商户POS机等基础设施缺乏,随着互联网技术的发展,互联网金融已成为农村的一种金融新业态。但是,农村现代化的金融服务设施供给不足、农民在互联网金融中的风险意识薄弱等导致农民难以充分享受到我国农村金融改革和金融发展的成果。
(8)

(2) 归一化相关系数(Normalized Correlation,NC)[14]:
(9)

4.2 自适应性评价
为分析上述算法对不同水印嵌入到不同载体图像的自适应性问题,本文采用以下两组实验进行水印的嵌入。对算法性能的评价采用峰值信噪比PSNR和归一化相关系数NC,即:当RPSN>20且CN>0.7时,则说明该算法有效;当RPSN>30时,则说明水印的透明性能优秀,具有很好的不可见性;当CN>0.9时,则说明抗攻击性能不错,水印能够被完整地提取出来[15]。
(1) 将同一水印嵌入到不同亮度的同一载体图像。本文通过使用MATLAB函数imadjust对原始载体图像scenery.jpg(2 048×1 448)进行亮度调整,获得两幅曝光度不同的载体图像,并分别对其进行水印nculogo.png(244×244)的嵌入和提取,实验结果如表1中的第1-3行所示。结果表明,同一水印嵌入到亮度不同的同一载体图像,其PSNR值基本不发生变化,均满足RPSN>20且CN>0.7,说明本文算法能够有效地对亮度不同的载体图像进行水印强度的自适应嵌入。

表1 自适应性能测试结果

续表1
4.3 鲁棒性与不可见性评价
为评价上述算法的鲁棒性及不可见性,采用上述算法将水印图像nculogo.png(244×244)、ncu_1.png(86×86)、logo.tif(122×108)分别嵌入到载体图像scenery.jpg(2 048×1 448)、trailer.jpg(1 024×684)、office_5.jpg(960×600)中,得到各自相应的含水印图像,计算各含水印图像的PSNR值,具体情况如表2所示。采用滤波、缩放、裁剪、噪声、旋转等攻击分别对各含水印图像进行攻击实验,从攻击后的图像中提取出水印图像,计算其NC值并与文献[16]进行对比,实验结果如表3所示。
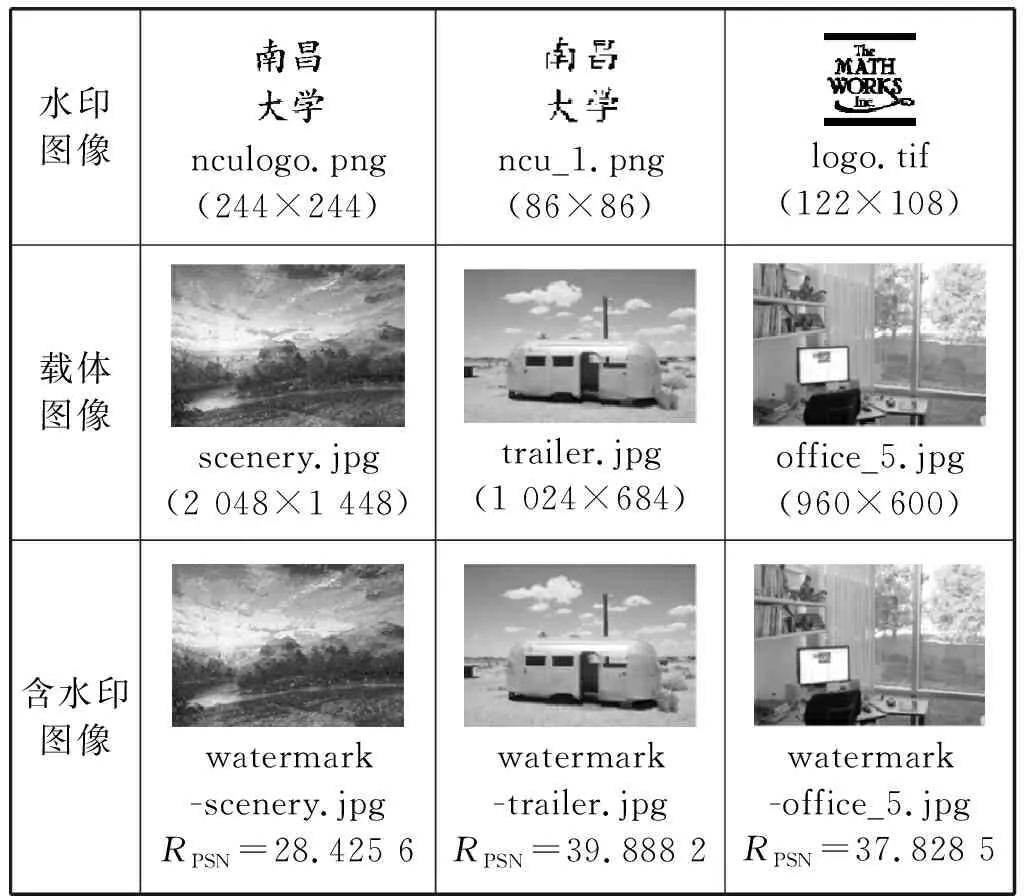
表2 实验用水印图像与载体图像
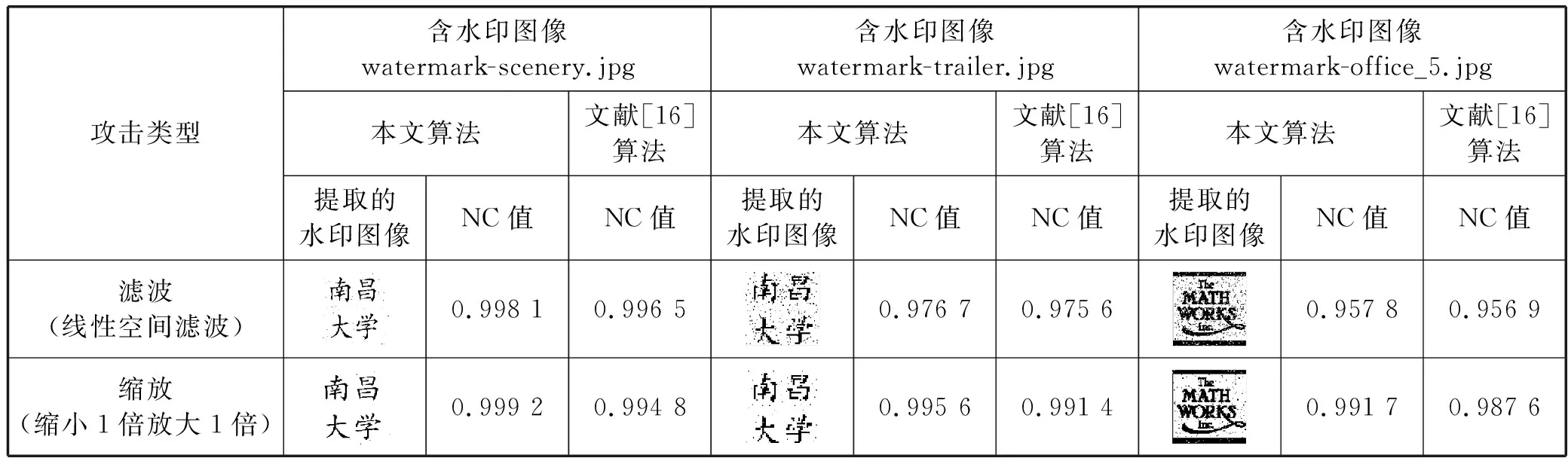
表3 鲁棒性测试结果

续表3
由表2可知,本文算法将不同的水印图像分别嵌入到不同的载体图像中,得到的各含水印图像其PSNR值大小关联着载体图像及水印图像的尺寸等特性因素,其PSNR均大于30或接近30,表明水印的嵌入并未使载体图像质量发生太大的变化,水印系统的透明性能优秀,具有很好的不可见性。表3对各含水印图像进行的不同类型的攻击实验,结果表明,含水印图像受攻击后提取的水印图像其NC值大小(反映鲁棒性)关联着载体图像、水印图像的特性以及攻击的类型等因素。从攻击类型来看,受滤波、缩放、裁剪(左上角1/8)、噪声、旋转等攻击后提取的水印图像其NC值较大,满足CN>0.9,说明算法抗攻击性能很好,水印能够被完整地提取出来。而受裁剪(中心1/4)攻击后提取的水印图像其NC值偏小,但均接近0.9,满足CN>0.7,说明该算法是有效的。与文献[16]相比,本文算法在受裁剪(中心1/4)攻击后提取的水印图像其NC值小于文献[16],其他类型攻击后提取的水印图像其NC值均大于文献[16],表明该算法抵御上述攻击的鲁棒性总体上比文献[16]更好。综合而言,该水印系统在对抗不同类型攻击时具有良好的鲁棒性。
5 结 语
本文对自适应图像水印系统进行了设计与研究,该水印系统实现过程简单,在水印嵌入过程中基于人类视觉系统的亮度掩蔽特性,优化了水印的嵌入位置及嵌入强度因子,实现对水印的嵌入强度、嵌入位置等随载体图像各部分特性的不同而自适应地嵌入。实验结果表明,该水印系统具有良好的自适应性能,能较好地均衡系统的鲁棒性和不可见性。但对于大范围的裁剪和旋转攻击方面,该水印系统效果欠佳,有待进一步改进与完善。后续研究将该水印系统应用于防伪溯源、版权保护、隐藏标识、认证等领域。
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
农业机械学报(2020年2期)2020-03-09
红领巾·萌芽(2019年8期)2019-08-27
中华建设(2019年7期)2019-08-27
摄影之友(影像视觉)(2019年3期)2019-03-30
中国与非洲(法文版)(2017年10期)2017-11-23
小天使·六年级语数英综合(2017年5期)2017-05-27
项目管理技术(2016年12期)2016-06-15
现代工业经济和信息化(2016年19期)2016-05-17
公民与法治(2016年23期)2016-05-17