
智能优化技术在舰船电力系统谐波抑制中的应用
2023-05-05 00:53刘伟
舰船科学技术 2023年6期
刘 伟
(沈阳城市建设学院 信息与控制工程学院,辽宁 沈阳 110167)
0 引 言
谐波的出现,会降低舰船电力系统电能生产、传输以及应用效率[1-3]。当舰船电力系统出现谐波,电气设备会出现异常升温、振动等问题,此时绝缘老化率提升,可用时间也会逐渐变少。除此之外,还会导致舰船电力系统的继电保护与自动装置出现误动,从而导致电力系统的稳定性受到负面影响。
目前舰船电力系统中核心应用为大功率变流装置,此类装置的使用会导致电力系统出现大量谐波电流,如果这些谐波不能被有效抑制,便会导致舰船电气设备运行状态受到威胁。所以,舰船电力系统谐波抑制方法,是舰船电力系统研究的一项核心内容。
分析已有研究资料可知,周祎隆等[4]使用并联有源滤波器,抑制舰船电力设备所用的大功率变频设备谐波,但此类装置的参数设定具有固定性,不具有自适应调整能力,在舰船运行时,电力设备出现的谐波问题,会存在随机性和无规律性,此类装置的应用效果还需优化。齐坤等[5]在抑制舰船电力系统谐波问题时,使用下垂控制方。此方法虽然能够以功率合理分配的方式,保证舰船电力系统正常运行,从而避免出现谐波问题,但属于间接抑波方式,缺乏直接性,不具备针对性的电力系统谐波抑制能力。
结合前人研究成果和存在的不足,本文提出基于智能优化技术的舰船电力系统谐波抑制方法。此方法在解决谐波抑制问题时,将模糊PID 控制器和智能优化算法相结合,根据已知谐波分量,调节电力系统电流,完成谐波的智能优化抑制。
1 舰船电力系统谐波抑制
1.1 基于p-q 检测的舰船电力系统谐波检测方法
设置舰船电力系统的三相电压(uA,uB,uC)、电流()依次为:
式中:Un,In分别为各次谐波电压、电流有效值;ϖ,t分别为角频率与时间变量;ϕ为电压相角的瞬时值。
获取有功功率q和无功功率p,q和p属于瞬时变量,则
式(4)的有功功率q、无功功率p均存在基波电流分量、谐波分量,此时三相基波电流分量iAg,iBg,iCg为:
每相电流里谐波分量iAx,iBx,iCx,即为线路各相电流和基波分量之间的差值,则舰船电力系统谐波总值是iO=iAx+iBx+iCx。
1.2 基于模糊PID 智能优化的谐波抑制方法
1.2.1 用于抑制谐波的模糊PID 控制器设计
图1 为基于模糊PID 智能优化的谐波抑制方法中,用于抑制谐波的模糊PID 控制器结构示意图。
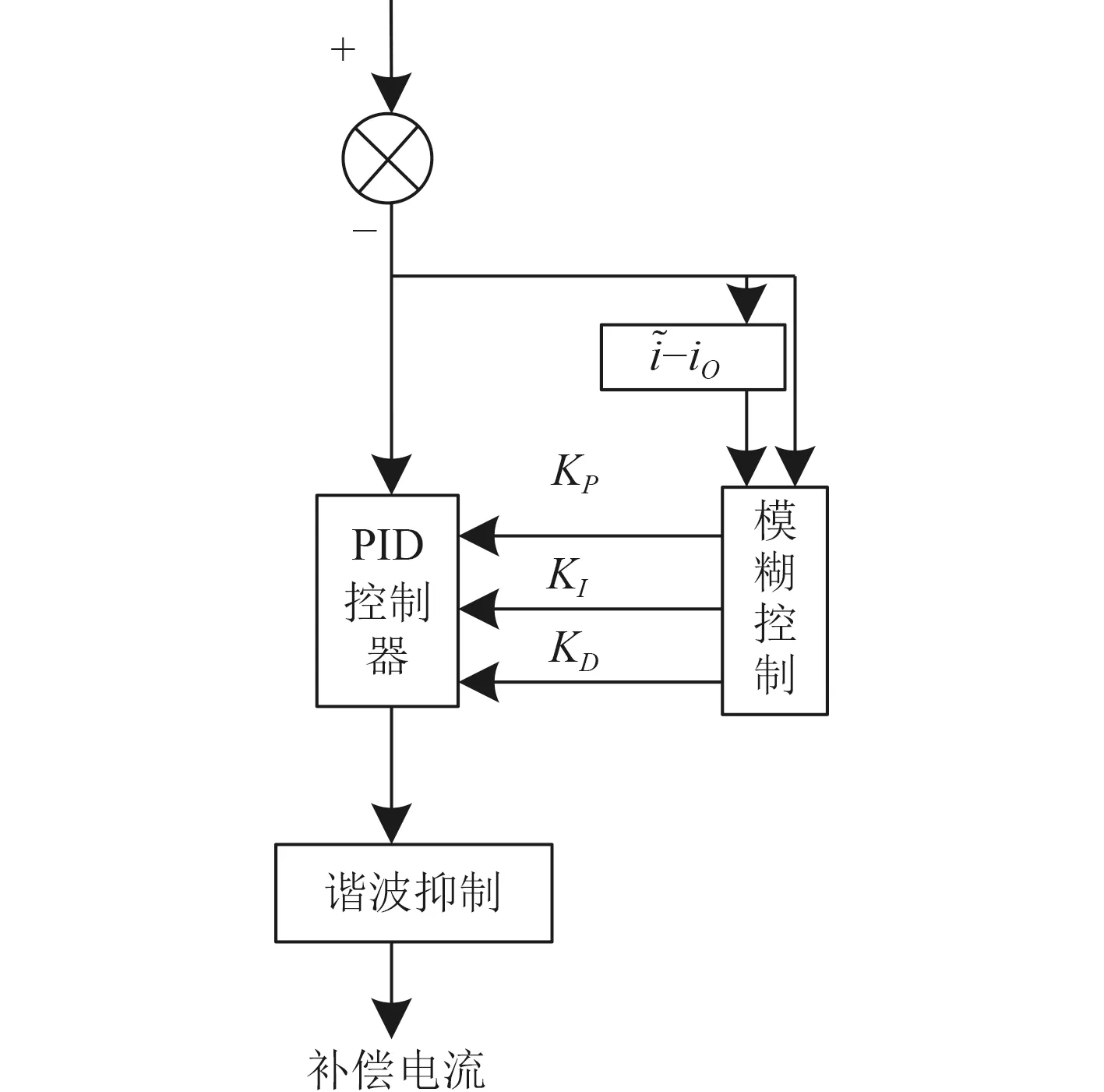
图1 模糊PID 控制器结构示意图Fig.1 Structure diagram of fuzzy PID controller
图中,KP(比例系数)、KI(积分系数)、KD(微分系数)和i′与iO之间的关联性为:
调整KP,KI,KD大小,保证模糊PID 控制器的输出满足期望,便可调节舰船电力系统的电流谐波,完成谐波抑制,所以KP,KI,KD大小的合理设置,直接影响控制器对谐波的抑制效果。
1.2.2 基于改进遗传算法的控制器智能优化方法
改进遗传算法使用时,会将可行解集合比喻为种群,各个可行解即为种群里的多个个体,个体基因是可行解的详细信息。在本文研究中,个体基因是控制器智能优化时,KP,KI,KD的具体数值。使用改进遗传算法对模糊PID 控制器参数进行智能优化时,要结合KP,KI,KD的特点,以特殊的编码模式,把控制参数编码为个体基因,再引入改进遗传算法,将个体执行迭代寻优,迭代停止后,便输出种群里适应度最大的个体,把此个体基因执行解码,便可获取KP,KI,KD的最佳组合。图2 为控制器智能优化流程。

图2 控制器智能优化流程Fig.2 Intelligent optimization process of controller
图2 中的核心操作内容如下:
1)初始化种群。遗传处理前必须设定初始种群,引入随机模式构建初始种群,种群基因变化范围设为1~5。
2)编码和解码。实数编码操作难度小,所以引入此编码模式,将模糊PID 控制器的控制参数编码为个体基因。
3)适应度函数设置。将模糊PID 控制器对谐波抑制的理想值 ˜i、谐波值iO之间偏差的绝对值的积分Iˆ,作为适应度函数的计算参量。适应度函数值较高,则模糊PID 控制器的质量较好,此时谐波抑制后电流畸变值为最小值,改进遗传算法寻优目的即为适应度最大值,则
4)交叉、选择、变异处理。交叉处理主要结合自适应交叉概率、目前迭代过程中种群适应度值均值Gavr、最大值Gmax,自适应调节交叉概率。设置交叉概率后,根据交叉概率在种群里筛选个体(控制参数可行解)执行交叉处理,应用算术交叉算法执行交叉计算,若将交叉后个体的第j个基因执行变异。
2 仿真实验
2.1 实验环境设计
舰船电力系统中,使用4 台分布式电源,功率因数为0.98,此电力系统属于舰船电力推进系统,其结构主要分为主推进器、侧推进器,具体结构简图如图3 所示。电力推进系统属于独立性的电力系统,因为发电容量存在有限性,且遭到非线性负荷的负面影响,便会出现大量谐波电流,影响舰船电力推进系统正常运行。

图3 舰船电力系统简图Fig.3 Ship power system diagram
2.2 谐波抑制效果测试
本文方法对图3 的电力系统谐波检测结果如图4所示。舰船电力系统谐波污染下,电力系统电流存在明显畸变,若不进行有效抑制,便会导致电力系统的推进进程出现断续情况。

图4 舰船电力系统谐波检测结果Fig.4 Harmonic detection results of ship power system
本文方法对图4 的谐波执行抑制,抑制后的电力系统电流变化如图5 所示。对比图4 和图5 可明显看出,本文方法对舰船电力系统谐波抑制后,电流畸变情况明显改变,电流污染得到有效解决。证明本文方法可用于舰船电力系统谐波抑制问题中,具备谐波抑制能力。
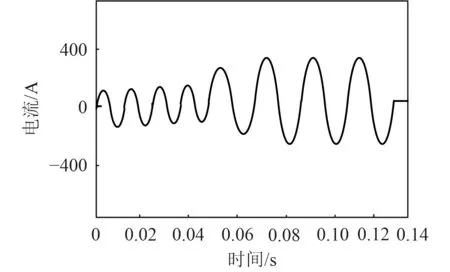
图5 谐波抑制后电力系统电流变化Fig.5 Power system current change after harmonic suppression
为深入分析本文方法所用的智能优化技术,对谐波抑制的必要性,分析本文方法使用改进遗传算法前后,模糊PID 控制器的使用效果。实验中,在0.08 s时施加畸变电流,则测试结果如图6 所示。分析可知,当0.08 s 时施加畸变电流后,模糊PID 控制器优化前,在0.10 s 时才完成谐波抑制;而模糊PID 控制器经改进遗传算法优化后,在0.085 s 便可完成谐波抑制,由此证明,本文方法使用改进遗传算法,对模糊PID 控制器执行参数优化设置,存在必要性。

图6 模糊PID 控制器优化前后单位阶跃响应变化Fig.6 Change of unit step response before and after optimization of fuzzy PID controller
3 结 语
针对舰船电力系统出现的谐波污染问题,本文提出基于智能优化技术的谐波抑制方法。此方法的创新之处在于应用改进遗传算法,优化设置模糊PID 控制器的控制参数,实现电力系统谐波电流的自适应补偿抑制。经过实验验证,本文方法对舰船电力系统的谐波抑制效果,能够满足舰船电力系统谐波管理标准。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2021年12期)2021-03-29
初中生世界·八年级(2019年6期)2019-08-13
石油地球物理勘探(2017年2期)2017-11-23
中央民族大学学报(自然科学版)(2017年1期)2017-06-11
统计与决策(2017年2期)2017-03-20
小学生导刊(低年级)(2016年6期)2016-07-02
舰船科学技术(2016年1期)2016-02-27
智能系统学报(2015年4期)2015-12-27
计算机工程(2015年8期)2015-07-03
