探究三维激光扫描仪在建筑立面测绘中的应用
2023-04-29 12:05:17何流
信息系统工程 2023年9期
何流

摘要:随着我国城市化进程的加快,建筑外立面测绘工作逐渐增多,传统的测绘技术已经无法满足现代建筑立面测绘的相关要求。三维激光扫描测量技术的出现和发展,克服了传统建筑立面测量的局限性,它能对建筑物进行无接触、快速、高精度扫描,同时将获得的点云信息快速转换成计算机可以处理的数据的高效测量方式,因此成为建筑立面测绘的新方法。结合工程项目重点分析建筑立面测绘的相关问题,讨论三维激光扫描仪的应用效果。
关键词:三维激光扫描仪;建筑立面;测绘应用
一、前言
随着社会经济的快速发展,原有城市基础设施已经不能满足发展需求,所以必须综合整治建筑立面、交通等,既可以完善城市交通网,提升街区整洁度,还能够加强街区业态活性,丰富生态景观,从而展示出城市发展面貌。在改造城市基础设施时,如果周边原有历史街区、建筑,则要保护无需改造的设施,表现出街区建筑立面的统一性、整体性。在开展施工之前,以测绘方式获取建筑信息,如全站仪法、人工测量法、近景摄影测量法、三维激光扫描法[1]。由于传统测绘方式面临较多的工程量时很难保证测绘精度,所以要研究工程量少、精度高的测绘方法,即三维激光扫描技术,从而有效地适应建筑立面的测绘要求[2]。
二、三维激光扫描技术
(一)技术原理
在科研、工程项目领域,三维激光扫描仪应用非常多,包括相位差式、脉冲式、三角测距式,其中应用最广泛的是脉冲式。该扫描仪的工作原理是遵循激光测距原理扫描,扫描仪负责发射、接收激光信号,测量返回时间的距离,以激光脉冲获取建筑密集点的信息,内业处理扫描信息后获取建筑的特征点,整理扫描物信息后建立建筑模型。此外,在外业扫描操作中,按照实际要求配置数码相机,获取实体影像信息,详细记录建筑颜色信息。在处理后期数据时,加载扫描数据的点云像素,选取特征点绘制图像,加强可视化效果[3]。
(二)技术优势
三维激光扫描仪属于非接触测量系统,能够收集高密度、大面积的三维数据信息,具备较高的数据收集效率。相比普通测量法,三维激光扫描法的工作点位精度高,且点位密度大,能够提升数据信息、坐标点参数的扫描速率。三维激光扫描技术能够实现主动式光源,即使在无光照条件下也可以实现观测,所以逐渐应用到隧道内部、建筑内部的扫描工作中。三维激光扫描设备能够同步接收反射激光、可见光条件,扫描处理光照强度、物体色彩,从而形成三维坐标体系,获得三维影像信息[4]。
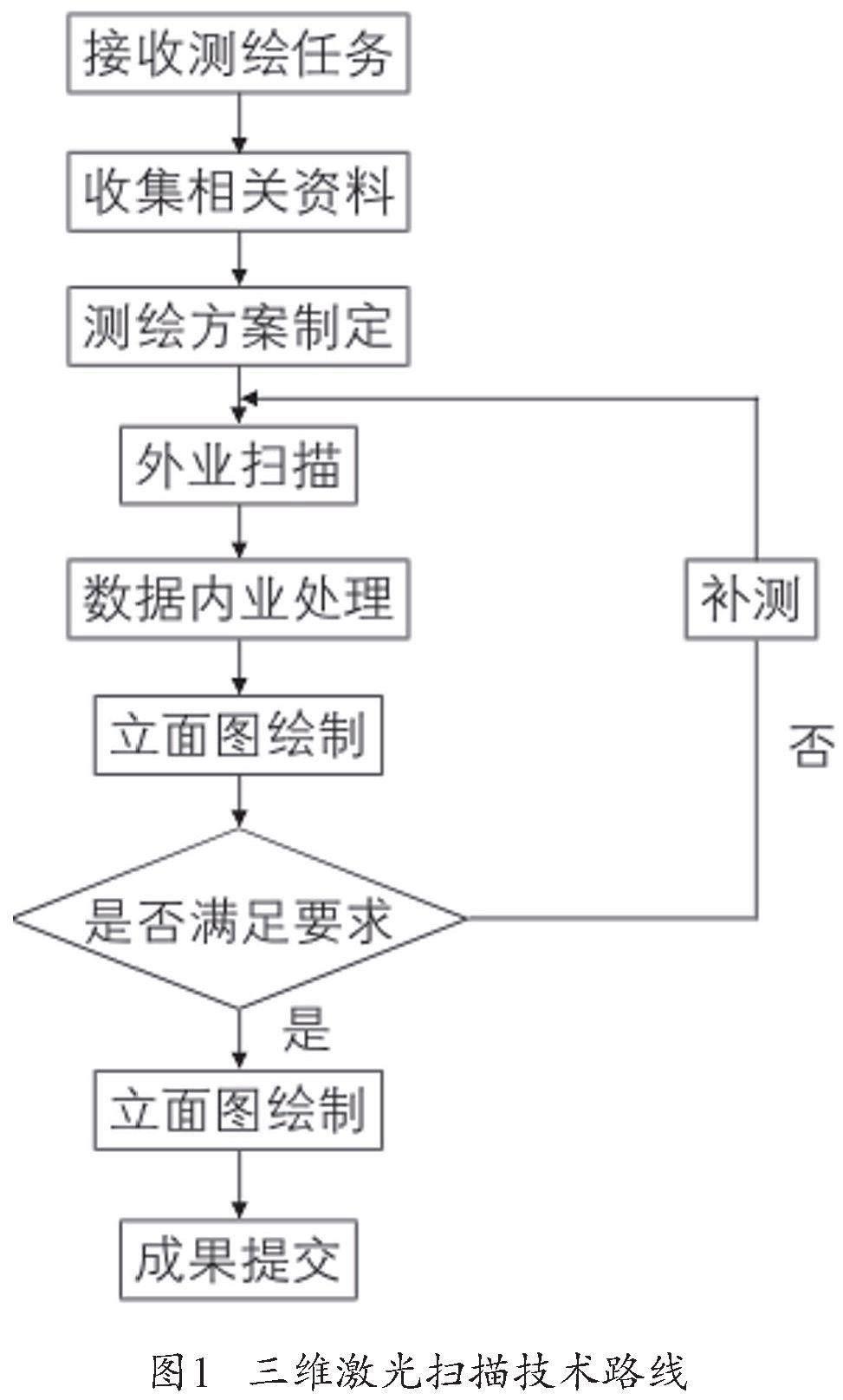
(三)技术路线图
基于三维激光扫描仪的工作原理,参考项目的目标成果,制定扫描工作的流程。之后,制定扫描工作技术路线,如图1所示。
三、三维激光扫描作业流程
建筑立面测量时,如果使用三维激光扫描仪装置,则测量环节非常多,比如点云数据采集与处理、绘制立面图。点云数据采集,包括现场踏勘、架站扫描、绘制草图等。数据处理涉及点云数据处理、绘制立面图[5]。
(一)采集数据
第一,现场踏勘。外业数据采集前,测量人员要深入现场踏勘,保证扫描路线的合理性。
第二,架站选择、扫描。扫描仪架设地点,应当与人群、车辆保持安全距离,选择坚硬地面,邻近站要具备通视条件,且包含30%的公共区域。当区域遮挡严重时,则要增加测站的数量,保证数据采集的完整性。同时要控制架站密度,以免数据采集、处理的工作量增加。扫描操作中,保证点云密度设置的合理性,减少点云过疏问题,以免影响建筑特征点的精度。同时控制点云过密问题,以免增加点云数据量、内业处理时间。在扫描操作中要使用不同等级,参考项目要求、扫描对象复杂度,采用中密度扫描模式。
第三,绘制草图。扫描操作中,通过视觉惯导系统,实时追踪扫描仪的位置,通过计算机自动拼接。当扫描邻近点无重叠区时,则扫描仪不能自动拼接。绘制草图是在地形图上记录扫描路线、测站编号,帮助内业完成点云拼接。
(二)数据处理
三维激光扫描结束后,内业将测站点云导入软件内,处理拼接之后,可以形成完整的点云。
第一,点云拼接。基于约束条件,将多站扫描数据配置到统一坐标系内。采集点云数据时,采用视觉追踪技术、拼接技术,将数据导入云端,以点群方式显示。检查预拼接云群的精度后,采用视图拼接方式,将邻近点群拼接在一起。拼接操作结束后,注重优化约束条件,冻结生成ScanWorld、Modelspace,完成拼接操作。
第二,点云统一化。将多站点的点云数据处理为合并点云,是点云优化处理法。拼接各个站点的点云数据,则会出现点云数据重叠问题。点云融合目的是按照点云归一化算法,优化重叠点云,便于浏览、选择点云。
第三,点云去噪。是一种优化点云的过程,对于扫描仪装置的原始点云,涉及干扰点、错误点,因此噪声来源比较多,当物体表面比较光滑,采用镜面反射方式,可能会出现大量错误点。在温度、强光、雨雾的环境影响下,传感器捕捉到错误信息。激光光束的离散度,可以同步光束发射、接收物体反射光束,所以地物边缘存在明显的噪声。去噪之后,采用软件算法进行计算,以“Terrasolid”、人机交互法开展点云滤波处理。应用软件内的“Fence”框选工具,选择要删除的点云。如果处于复杂场景,则采用“Limit Box”工具约束范围,之后删除点云。
第四,点云抽稀。根据工程的精度要求,抽稀处理原始点云,缓解数据存储、处理压力。应用三维激光扫描仪,短期获取大量点云数据,对计算机运算效率、速度的影响大,在确保里面细部精确度的同时,要做好点云数据抽稀处理[6]。
(三)高程误差改正模型
高程点位精度,对三维激光扫描技术的监测效果影响非常大,因此要对点位高程精度提出严格要求。按照建筑工程测量规范可知,点位高程位移平均速率控制值为每日2mm,分析扫描结果可知,如果点位高程没有经过改正处理,则很难达到标准要求,因此要嘎正高程点位误差。分析系统点位精度、高程误差方差、贡献率可知,测距对高程误差的影响较大,高程误差、测距的相关性较强,因此要选择基线比较模型法,对高程误差进行排查,才可以获得准确的数据结果。
(四)绘制立面图
第一,建筑立面编号。绘制立面图前,应当做好编号处理,将方位索引编号标记到立面。如果一个立面的折面比较多,则要添加数字编号。命名图名时,要参考测区名称—建筑编号—方位索引号的格式。
第二,绘制立面图。将点云数据导入软件内,处理为rcp.格式点云,之后导入绘图软件内。合理设置用户坐标系,将建筑立面投影到正视图中。
四、工程案例
(一)案例一
1.工程实况
A建筑立面测绘项目是城区改造项目,绘制建筑立面结构,建立三维模型,为建筑立面治理提供参考。项目所在区域的道路长度为3.36km,路面宽度小,分布低矮建筑。沿线树木高大,遮挡问题严重,交通运行量大。
2.工作流程
三维激光扫描建筑立面开展时,划分为前期准备、外业数据采集、内业数据处理、数据成果实现。在前期准备环节,要收集好项目范围内的资料,明确项目背景、项目需求、技术重难点,联合现场踏勘,优化配置测绘人员,设置技术路线,编制详细的测绘方案。外业数据扫描时,明确测站位置、扫描参数,通过三维激光扫描仪扫描目标、拍摄影像图。完成数据采集后,自主检查数据。在内业数据处理中,通过点云处理软件开展查看、拼接、降噪、抽稀处理。数据成果实现则采用点云漫游、立面绘制切片、三维建模实现,绘制完整的建筑立面图。
3.关键技术要点
第一,前期准备环节。三维激光扫描建筑立面要确定项目工作流程、设站位置、扫描仪性能。在前期准备工作中,要深入现场踏勘,选择适宜的扫描仪设备。采用前期踏勘方式可以发现测量区的人流量多集中在上下班高峰,且树木高大,建筑低矮。按照区域的实际情况,选择扫描仪时要考虑高精度、远测程、便于操作的特点,如HS450三维激光扫描仪测距精度为8mm@100m、最大测距450m,全景分辨率高于7000万像素,测量频率为每秒50万点。选择10:00—15:00为测量时间范围,站间距离为30m。如果区域的测量难度大,则结合三维激光扫描法、传统测量法。
第二,外业数据采集。在采集外业点云数据时,对三维建模质量的影响非常大,人流量对噪点形成的影响大。在外业测量中,不仅要采取错峰手段,还要应用弹性测量机制,人为控制数据采集,缩短扫描仪、建筑物的间距,增加测站数量。在数据处理中,点云数据拼接为操作难点,确保前后测站间的重叠度达到30%,同时关注不同测站间的公共平面。在本次项目中,选择不同激光点频率设置,开展对比实验法,从而将点频率确定为100kHz。设置分辨率参数,能够决定扫描数据量、扫描时长。
第三,内业数据处理。点云拼接处理是将站点扫描数据配置到坐标系内,属于内业数据处理的关键步骤,拼接精度对成果质量的影响大。此次项目中,使用软件的邻迭代配准算法,按照前后顺序自动拼接点云,针对扫描角度、光照、环境影响下无法实现自动拼接的点云,则要在软件内识别邻近站点的标靶纸特征点,从而实现手动拼接,之后检查拼接误差,确保拼接误差小于2cm。本次项目中采用软件自带的点云自动过滤功能,实现点云降噪处理。针对人、车影,如果不能自动去除时,则要以点云度变形选择器圈定噪声点云,之后再手动删除。精简、分割点云时,要使用软件自带功能处理,导出DXF.格式点云文件,采用CAD软件绘制立面图。
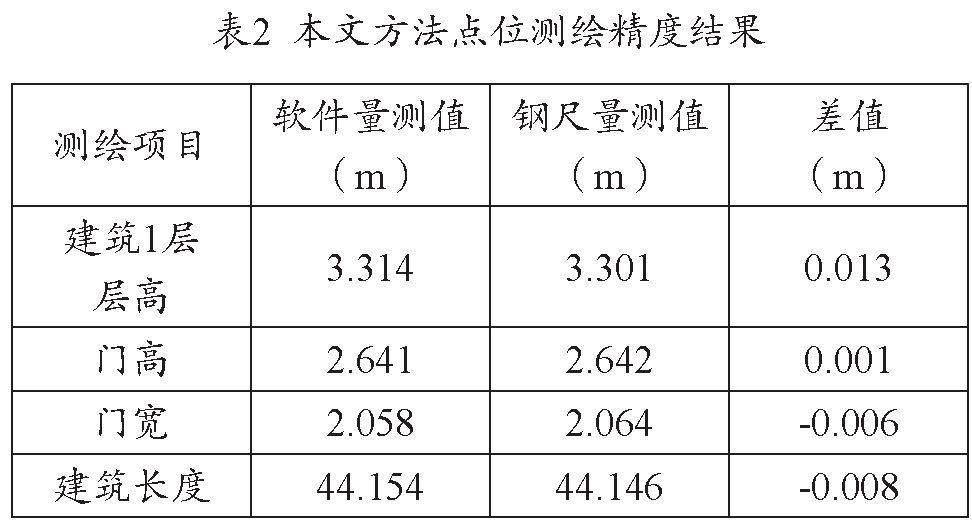
第四,分析扫描精度。为了对三维激光扫描仪的应用效果进行验证,分析建筑立面测绘的精确度,使用全站仪设备测量建筑立面、拐角坐标、门窗部位等,对比测量数据、扫描数据,如表1所示。基于数据结果,无需考虑全站仪测量的精度误差,确保建筑测绘数据、全站仪测绘误差小于10mm。测绘工作精度应当满足建筑测绘的设计要求。在此基础上,量测同一特征线的测绘点,对比测绘结果、钢尺量测结果,并将其作为本文点位的测绘精度,如表2所示。
通过上述结果可知,测绘误差值最小为1mm,最大为8mm,各项测绘误差控制在10mm内,所以本文设计方法的精度较高。
(二)案例二
1.工程概况
A路是展示城市形象的重要窗口,综合改造和整治临街建筑,整合处理街区内临街墙面、门面的无序状态,形成高品位的示范区,有助于完善城市功能、提升城市形象,改善沿线市民居住环境。改造之前,对临街建筑立面进行普测,为改造设计提供参考。
2.实施概要
A路全长为1.8km,建筑立面测绘面积为9.8万平米。建筑立面图涉及建筑立面全要素,比如空调外机、落水管、水表电箱、墙面等。提取立面特征点,参考建筑制图的标准,绘制建筑立面轮廓,保证建筑形状、附属结构、空间关系表达的准确性。绘制立面图后,要使用CDA软件查询对象面积,此时就要应用到对象数形窗口,针对性选择图层信息,统计要素的数量和面积。
3.质量检查
检查建筑立面的质量,可以保证立面图要素内容的正确性、要素表达的完整性,同时确保立面图要素绘制、点云数据的相符度。只有保证搭接关系、空间表达的正确性,才可以保证图面整洁度、立面图提交格式达标。为了检验测绘精确,测量人员要使用传统测量法,先在测量区选择18条边,对比建筑提取的特征线,结果如表3所示。分析表内数据可知,边长较差分布在1~3cm,边长中误差大约为3cm,精度满足规范要求。
4.注意事项
第一,建筑立面测量操作时,要控制三维激光扫描仪、建筑立面的距离,外业扫描时,以中低密度点模式为主,但不能选择高密度点模式,避免延长外业扫描时间、点云数据处理时间,导致点云数据容量扩大。
第二,建筑立面图绘制时,曲面绘制难度大,针对立面点云进行垂直切片处理,同时沿着点云的横截面绘制曲线,检查曲线数形、长度。绘制立面图后,标注出相关尺寸。
第三,在扫描目标建筑时,邻近建筑、树木会产生比较强的遮挡作用,致使目标建筑的点云数不完整,内业无法获得准确的建筑结构尺寸。根据露明部分的尺寸,逐步推算隐蔽尺寸,特别要说明推算结果。
五、结语
综上所述,在测绘建筑物立面时,全站仪法也可以提升外业效率,但是面临的外业工作量非常大,如果点位特征不明显,则很难准确识别,不但需要测绘人员花费大量的时间与精力,而且获取的测绘结果精准度不足。而三维激光扫描仪属于新的测绘方法,能够缩短外业操作的时间,且内业数据处理过程中能够直观看到建筑形状、变化趋势,可以保证外业测量结果的准确度,之后绘制准确的图像可以实现可视化的作业效果,最大限度地提升测绘效率与质量。本文采用具体案例分析法,论述三维激光扫描的技术要点,之后分析扫描精度,验证了三维激光扫描仪的应用效果,可以保证建筑立面测绘的准确度,为后期施工提供参考信息。
参考文献
[1]李林.三维激光扫描技术在特异型建筑构件检测中的应用探讨[J].工程机械与维修,2023,19(1):73-75.
[2]胡国军.地面三维激光扫描技术在历史建筑测绘工作中的应用[J].测绘与空间地理信息,2022,45(12):188-190.
[3]方舟,廖一联,王昊舒.三维激光扫描技术在文物建筑测绘中的应用研究——以成都杜甫草堂工部祠为例[J].建筑与文化,2022,26(8):219-221.
[4]麦贤敏,王晓亮,钟磊,等.三维激光扫描在文物建筑保护中的应用——以德格印经院为例[J].中国名城,2022,36(8):21-28.
[5]经皓然,徐敬海.异形建筑的无人机点云与地面三维激光扫描点云配准[J].测绘通报,2022,11(6):32-39.
[6]牛鹏涛,田疆.三维激光扫描与HBIM技术在历史建筑数字化建档中的应用探索[J].档案管理,2022,13(3):68-70.