基于点云抽稀构建干热河谷浅沟DEM及精度评价
2023-04-29 14:15:59杨枫邓青春
西华师范大学学报(自然科学版) 2023年3期
关键词:点云数据
杨枫 邓青春

摘 要:通过有效点云数据构建高精度数字高程模型对浅沟形态演化过程进行量化研究,不仅保证了建模精度,还缩短了建模时间。本文基于5组元谋干热河谷浅沟点云数据,首先以序列抽稀简化的方式,对比了Random、Space以及Octree三种抽稀模式下点云构建DEM的精度,确定了最佳点云抽稀方法和参数取值;其次通过实测验证数据集和浅沟横剖面对比两种方法对DEM精度进行验证。结果表明:三种最优参数取值构建的DEM均满足精度的需要,且大大缩短了建模时间。其中(1)Random模式能便捷地保留所需点云数量,其最优抽稀率为10%;(2)Space模式能很好地保证点间距离,最优参数取值为最小间距0.005 m;(3)Octree模式在空间划分上具有很强的优势,最优抽稀参数取值为11层树深抽稀;(4)三种抽稀模式中最优选择是Space模式。研究结果可为高效、高精度地构建浅沟DEM及形态演化过程研究提供依据。
关键词:点云数据;抽稀简化;浅沟DEM;精度评价
中图分类号:P217 文献标志码:A 文章编号:1673-5072(2023)03-0279-11
浅沟侵蚀也被称作临时性切沟侵蚀,是干热河谷土壤侵蚀的主要形式之一,宽30~50 cm,其宽度和深度介于细沟与切沟之间[1],发育演化过程复杂。在坡面径流的影响下,浅沟会进一步扩大侵蚀,发育成切沟、冲沟,因此对浅沟形态演化过程的量化研究显得尤为重要[2]。数字高程模型(Digital Elevation Model,DEM)是通过有限的地形高程数据实现对地形表面的数字化模拟[3],通过建立浅沟DEM对其形态进行监测已成为当下主要的一种技术手段。
近年来,激光扫描技术获取的点云数据被广泛用于各类地形变化观测中,而在微地形的研究过程中,点云数据建立DEM的精度是研究关键所在,直接关系着地形形态因子定量研究的准确性[4]。一般情况下,扫描获取的点云数据存在大量冗余,若不进行简化压缩,在时间效率和空间精度上都会受到影响[5],因此在保证精度的前提下,可通过适当方法以最少的点云来表征浅沟形态,缩短构建DEM时间,从而在采样密度和精度之间达到一个最优平衡[6]。许多学者基于此做了大量研究,主要归纳为以下几类方法:(1)基于聚类算法:选取合适的聚类中心代表每一类点云数据[7-8],或根据某一规则对点云进行分层聚类,然后再进行简化[9-10];(2)基于点云曲率:根据曲率设置不同的阈值[11-12],或将点云划分为不同类型和级别进行抽稀简化[13-14];(3)基于聚类中心与曲率结合:利用K均值聚类算法根据曲率对点云进行聚类简化,在高曲率区域保留较多的点[15-16],或者聚类后根据点到聚类中心的距离等条件进行抽稀处理[17-18];(4)基于中心点替代法:采用均匀网格法[19]、包围盒法[20]选取靠近网格中心或体素中心的点来代替周围其他的点实现抽稀[21];(5)基于点云密度:通过建立和确定K邻域中心点,根据其周围点云密度自适应抽稀;(6)其他方法:基于八叉树网格的点云几何拓扑关系法[22]、不规则三角网内插高程检核法[23]和栅格划分的主成分分析法[24]等。
针对扫描全站仪获取的浅沟点云数据,本文采用能控制抽稀简度的Random抽稀、保证点间距离的Space抽稀和在空间划分上拥有很强优势的Octree抽稀三种模式,以序列抽稀方式,通过与原始点云对比得到最优抽稀模式和参数,然后在不同区域进行结果普适性验证,最后用实测验证数据集和横剖面对比对构建的DEM进行精度评价,以期在保证精度和建模时间的情况下,用最少的点云构建DEM表示浅沟形态,为浅沟发育演化过程的量化研究提供技术支撑。
1 数据与方法
1.1 数据采集与预处理
1.1.1 建立控制網及碎步测量
本文选取地表形态破碎、沟道侵蚀较为严重的元谋干热河谷区作为研究区域[25]。据统计,元谋干热河谷沟壑密度较大,一般为3.0~5.0 km·km-2,最大达7.4 km·km-2[26]。实验区位于元谋县元马镇沙地村,微流域面积约为16.23 m2,流域内发育着沟蚀作用形成的浅沟是该区域重要流水通道。本研究对象为流域内4条浅沟(数据1—4),其中一条沟长约为9 m(数据1,图1)。研究结果验证区位于元谋县黄瓜园镇小雷宰村秃秃脊梁子(数据5)。
研究数据采集于2021年5月,空间参考为2000国家大地坐标系(China Geodetic Coordinate System 2000,CGCS2000)。为了便于后期的监测研究与数据处理,在微流域地形内布设永久性控制点,并利用中海达GNSS设备对控制点进行实时动态测量。浅沟点云数据采用Leica Nova MS60/TS60扫描全站仪获取,在采集前先用镰刀将测区内植被进行清理,确保采集到的是地表数据,然后通过全站仪以0.02 m步长对浅沟进行碎步测量,得到浅沟点云数据(表1)。
1.1.2 测针板横剖面测量
研究中使用如图2所示自制测针板,垂直测量精度为0.5 cm,垂直量程和水平量程分别为40.0 cm和49.0 cm。测量时,标有刻度的木板在上,另一块在下,用手提起上方的木板,将其放在待测剖面位置,让针自由下落形成相对高差基点,稳定后,将标有刻度的木板向上提至最低测针的满量程处,并用夹子将木块固定,形成一个以木块为X轴,测针为Y轴的直角坐标系,从左至右依次量取木板以上测针的有效长度并记录,如(1.0,10.5)。记录完成后在1号和49号测针位置用水泥钉作好标记,并用中海达GNSS测量坐标。本文选取数据1中图3所示的5个位置进行测量,将测得的剖面数据在Excel表格中保存,在Origin 2018软件中制图作为后文DEM精度评价基准。
1.1.3 Random抽稀
Random抽稀(随机模式)是一种结构化抽稀方式,参数是抽稀后剩余的点数,利用随机函数从原始点云数据中选出要保留的点,每个点被选中的概率相同。
1.1.4 Space抽稀
Space抽稀(空间模式)是另一种结构化抽稀方式,按照一定间距对点云均匀采样,从而达到抽稀的目的。该方法在运行过程中没有产生新的点云数据,抽稀后得到的点云是原始点云数据的一个子集,参数是一个距离阈值,值越大,保留的点就越少。设置两点之间的最小距离后,从原始点云中选择符合条件的点,结果点云中任意两个点的距离都必须大于等于这个阈值。
1.1.5 Octree抽稀
Octree抽稀(八叉树模式)是一种在三维空间的树状数据结构下对点云进行抽稀的方法。八叉树模式中允许选择八叉树的细分层次(图4),点云在这个层次上实现简化,层次越深,点云数量越大。该方法用距离体素中心最近的点来代替体素单元格内所有的点,抽稀后的点均来源于原始点集,这样不仅可以减少点云分布不均带来的影响,还尽可能地保留了原始特征。
1.2 DEM建立与筛选
DEM最主要的三种表示模型是:规则格网模型、等高线模型和不规则三角网模型。不规则三角网是一种采用一系列相连接的三角形拟合地表或其他不规则表面模型的方法,既能减少规则格网带来的数据冗余,同时在计算(如坡度)效率方面优于等高线模型,因此本文将抽稀后点云以创建不规则三角网[27]的方式建立分辨率为0.01 m的DEM,比较三种抽稀模式下点云重构地形与原始地形的逼近程度。
运用DEM差值法进行同一方法不同抽稀率DEM筛选,即比较原始DEM与抽稀后DEM相差程度,衡量点云特征点保留情况。在算法相同的情况下,两者差值越大,表示特征点丢失严重;差值较小,表明在精简点云的同时又保留了地形特征点。误差DEM采用目前常用的精度评价指标进行量化比较[28],即最大正误差(MPE)、最大负误差(MNE)、平均绝对误差(MAE)、均方根误差(RMSE)、平均误差(ME)以及标准差(SD)。设原始点云DEM高程为真值Z,抽稀后点云DEM高程值为z(测量值),误差定义ε=Z-z,则:
式中:n对应的高程点数;εi为i点的误差。
MPE和MNE大小表示抽稀后DEM相对于原始DEM波动范围;ME反映数据整体误差大小;RMSE反映高程真值与测量值的离散程度,SD反映各误差相对于平均误差的离散程度。ε越接近于0,其他各精度指标也越接近于0;而ME越接近于0,表示DEM效果越好;RMSE越接近于0,DEM中高程信息与高程真值越接近[29],由此筛选出评价指标值越接近于0的误差DEM,其对应的测量值(抽稀后DEM)为最优DEM,最优DEM所对应的抽稀方法和抽稀率为优选。若出现指标数值相同或接近时,则将建立DEM用时长短(建模时间)作为补判依据,选取建模用时较短的DEM为优,其对应的抽稀方法和抽稀率为优选。
1.3 横剖面绘制与精度评价
采用实测验证数据集和横剖面对比两种方法验证优选DEM精度,验证数据集采用前文DEM筛选时常用的几种精度评价指标进行量化;横剖面对比则是基于ArcGIS的3D Analyst功能,绘制测针板测量位置的横剖面曲线。其绘制方式为:利用ArcGIS“添加xy数据”将测针板位置坐标导入,捕捉该点要素绘制直线,利用“插值shape”将其转为3D线,以DEM为基础选择3D线,然后用Profile graph可以得到浅沟横剖面曲线图,再将生成的剖面图导出为txt文件,在Excel中打开并另存为xls文件。将测针板剖面数据和DEM剖面数据在Origin 2018软件中绘制剖面线,并利用“分析-数学-积分”计算出剖面线与X轴(沟宽)围成的数学面积,两者作差得到面积误差,以沟宽为X轴,该位置累积面积为Y轴,生成面積误差曲线。通过对比分析横剖面线的相似性、面积误差的大小对优选参数DEM进行精度验证。
2 结果分析与精度评价
2.1 不同抽稀方法参数取值分析
Random模式中,随着抽稀率不断增大,抽稀用时短且变化小。MNE与MPE随抽稀率的增大总体呈下降趋势,当抽稀率为10%、90%和95%时,两者差值较小,即相对于真值DEM波动范围较小(表2)。ME在抽稀率为55%、65%、75%、85%、90%以及95%时出现大幅度波动,而其他抽稀率误差都较小并接近于0,综合SD以及建模时间因素,在SD接近情况下,25%抽稀率所用建模时间约为10%抽稀率的2倍,故10%抽稀率为Random模式优选参数(R10)。
Space模式中,随着最小间距的增大,点云数量、抽稀率和抽稀用时均减少, MNE、MPE呈现出先增大后减小趋势(表3)。剔除ME异常值,其他各参数精度指标值均比较接近;其中最小间距为0.005 m时的ME均为0.000 1 m,SD约为0.005 0 m,其他指标也相对较小,故Space模式中,最小间距为0.005 m为优选参数(S0005)。
Octree模式中,随着树深(层数)的增加,点云数目、抽稀率以及抽稀时间均呈增加趋势(表4),各层精度指标值均较小且变化平缓,综合考量4种指标值,11层误差DEM效果最优,因此Octree模式中最优抽稀参数为11层树深(O11)。
2.2 参数取值的不同区域验证
不同抽稀方法的参数取值与处理的时空复杂度高度相关,由于原始点云空间特征和质量与具体区域的地形特征和母质等因素有关,本文选取了浅沟发育活跃的另一区域对前文得出的最佳参数取值进行验证。将原始点云构建的DEM与抽稀后构建的DEM做差,各项参数如表5所示,其中只有O11的ME超过了0.2 m,其余MNE、MPE、ME、和SD均小于0.2 m且三者的SD均接近于0。由此可以看出,三种抽稀方法的最优参数取值所建DEM与原始点云DEM误差较小,适用性较强。
2.3 DEM精度评价
2.3.1 实测验证数据集精度评价
针对5组数据,综合表2—5各精度指标和建模时间,S0005建立的DEM优于其他两种抽稀DEM,R10在建模时间上优于O11,因此不同抽稀方法的最优参数取值顺序为:S0005、R10、O11。
采用实测验证数据集对三种优选DEM进行精度验证时,三种抽稀DEM与原始DEM在几种精度评价指标下差异并不显著,有的甚至比原始DEM误差还小;而在点云数目和建模时间上,三种抽稀模式下的点云相对于原始点云数目差距却十分明显,且原始点云数据量越大,O11抽稀越明显(表6)。
2.3.2 横剖面精度评价
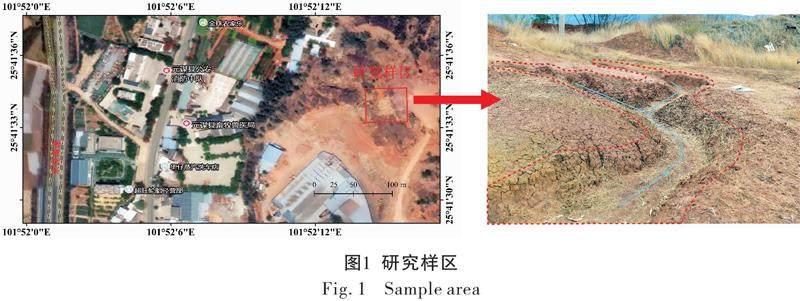
以测针板实测的横剖面线数据为基准,选取数据1中图3所示的5个位置,对三种优选DEM进行横剖面线精度评价。对比发现,测针板测量的横剖面线与DEM提取的横剖面线基本重合(图5),局部存在差异是由于扫描仪架设或扫描过程中仪器本身下陷,同时浅沟剖面土壤之间存在裂缝也会增大误差;另外,测针本身的重量使其在土质疏松的地方下陷等问题造成局部误差,因此通过DEM提取的横剖面线具有一定可靠性。此外,对比不同横剖面提取方法与X轴围成面积发现,相对误差在5~10 cm2,占5%左右(表7)。综上表明,三种优选DEM提取的横剖面线精确可靠,能清楚反映浅沟形态。因此,可以用10%抽稀率的Random抽稀、最小间距0.005 m的Space抽稀以及11层树深的Octree抽稀后的点云代替原始点云进行DEM构建,并能够降低计算成本,缩短建模时间,提高计算效率。
3 讨 论
浅沟是线状流水作用在松散土層构成的平坦地面上形成的沟谷,其规模小、深度浅、形态不稳定。在运用扫描全站仪对浅沟形态监测过程中,为了详细记录地表高程数据而将扫描间距设置得尽量小,因此增加了点云数据冗余[30]。基于此,本文借助CloudCompare软件运用三种方法对4组浅沟点云数据进行抽稀处理,对比检验点云抽稀的效果,结果与魏舟等[31]的最佳点云密度选取基本一致。
3.1 扫描步长与抽稀的关系
点云数量作为地形DEM建立过程中的主要影响因子之一,间接影响微地形因子定量研究的准确性[32],而在点云数据采集过程中,为了尽可能详细地记录地表高程信息,因此将扫描步长设置得尽可能小,或者在某些地形复杂区域进行多次叠加扫描,从而增加了点云数量,造成了点云数据冗余[31],如果在数据采集过程中合理地设置扫描步长,就能在最开始减少数据冗余,达到数据抽稀简化的效果。多大的扫描步长适合微流域地表信息采集,以及最优扫描步长获取的点云数据和运用较小扫描步长获取数据后再进行抽稀简化,两者建立的DEM,谁能更接近原始地表形态等问题还有待研究。
3.2 地形与特征点对抽稀的影响
地形复杂程度作为地表建模重要的考量因子,直接影响点云数据的质量,本文选取了两处浅沟发育活跃区域共5组数据进行不同抽稀方法参数取值分析和结果验证,具有一定的普适性。点云特征点指的是点坐标信息发生巨大变化或点云曲率较大的点,能反应点云本质特征,标识地形表面的特征区域,因此在点云精简过程中,特征点保留的多少将直接影响建立DEM的精度[15]。本文在点云抽稀之前,没有对特征点进行提取保留,只是用抽稀后DEM的精度来衡量特征点的保留情况,因此在后续研究中应加入特征点提取算法,达到精度和效率最优平衡[33]。
3.3 DEM分辨率的选择
点云数据进行地形DEM建立过程中的主要影响因子是点云数量和DEM水平分辨率,DEM分辨率的大小决定着微流域地表形态特征的表达程度,直接影响建模耗时和后续工作精度[34]。目前常用坡度中误差法[35]来选择合适的DEM分辨率,或者通过各地形因子随DEM变化,选取变化趋势最稳定的为最佳分辨率[36],但对于地形特殊的流域微地貌单元来说,应根据具体应用模型选择适合该流域的DEM分辨率。
4 结 论
本文利用5组浅沟点云数据选取了能控制抽稀简度的Random抽稀、保证点间距离的Space抽稀和在空间划分上拥有很强优势的Octree抽稀三种模式,以序列抽稀的方法,从建模质量和速度两个方面进行了分析和评价,通过对比验证发现,最小间距0.005 m的Space抽稀效果最好,更接近原始点云数据,既能有效减少数据冗余,保留地形特征,又能大大缩短建模时间,保证时间效率。
参考文献:
[1] FOSTER G R.Modeling ephemeral gully erosion for conservation planning [J].International Journal of Sediment Research,2005,20(3):157-175.
[2] 郑粉莉,唐克丽,周佩华.坡耕地细沟侵蚀影响因素的研究[J].土壤学报,1989,26(2):109-116.
[3] 汤国安,李发源,刘学军.数字高程模型教程[M].2版.北京:科学出版社,2010.
[4] 高树静.地表糙度的特征与分析[D].杨凌:西北农林科技大学,2010.
[5] 付玮,吴禄慎,陈华伟.基于局部和全局采样点云数据简化算法研究[J].激光与红外,2015,45(8):1004-1008.
[6] 钱金菊,张昌赛,王柯,等.机载LiDAR点云数据抽稀算法研究述评[J].测绘通报,2017(S1):33-35+58.
[7] SONG H,FENG H Y.A global clustering approach to point cloud simplification with a specified data reduction ratio [J].Computer-Aided Design,2008,40(3):281-292.
[8] 陈龙,蔡勇,张建生.自适应K-means聚类的散乱点云精简[J].中国图象图形学报,2017,22(8):1089-1097.
[9] 王茹,周明全,邢毓华.基于聚类平面特征的三维点云数据精简算法[J].计算机工程,2011,37(10):249-251+254.
[10]解则晓,刘静晓,潘成成,等.一种散乱分层点云的有序化精简方法[J].图学学报,2016,37(3):359-366.
[11]MIAO Y,PAJAROLA R,FENG J.Curvature-aware adaptive re-sampling for point-sampled geometry [J].Computer-Aided Design,2009,41(6):395-403.
[12]陈璋雯,达飞鹏.基于模糊熵迭代的三维点云精简算法[J].光学学报,2013,33(8):161-167.
[13]王永波,盛业华.一种基于曲率极值法的LiDAR点云特征提取算法[J].中国矿业大学学报,2011,40(4):640-646.
[14]叶珉吕,花向红.面向地形数据的点云简化算法[J].大地测量与地球动力学,2015,35(3):424-427.
[15]袁小翠,吴禄慎,陈华伟.特征保持点云数据精简[J].光学精密工程,2015,23(9):2666-2676.
[16]常俊飞,任思红,姚涛.基于边界保留的点云精简算法研究[J].测绘与空间地理信息,2019,42(4):136-140.
[17]史宝全,梁晋,张晓强,等.特征保持的点云精简技术研究[J].西安交通大学学报,2010,44(11):37-40.
[18]苏本跃,马金宇,彭玉升,等.基于K-means聚类的RGBD点云去噪和精简算法[J].系统仿真学报,2016,28(10):2329-2334+2341.
[19]SUN W,RADLEY C B,ZHANG Y F,et al.Cloud data modelling employing a unified,non-redundant triangular mesh [J].Computer-Aided Design,2001,33(2):183-193.
[20]LEE K H,WOO H,SUK T.Data reduction methods for sererse engineering[J].The International Journal of Advanced Manufacturing Technology,2002,17(10):735-743.
[21]車翔玖,刘杨,赵义武,等.基于k-邻域密度的离散点云简化算法与实现[J].吉林大学学报(理学版),2009,47(5):994-998.
[22]周波,陈银刚,顾泽元.基于八叉树网格的点云数据精简方法研究[J].现代制造工程,2008(3):64-67.
[23]卢维欣,万幼川,陈茂霖,等.顾及地形特征的LiDAR点云数据快速处理算法[J].地理空间信息,2015,13(4):41-43+12.
[24]付忠敏,张星,孙志刚.基于主成分分析与栅格划分的点云压缩算法研究[J].计算机与数字工程,2017,45(12):2341-2345+2388.
[25]丁琳,张斌,邓青春,等.元谋干热河谷区面积高程积分分析[J].西华师范大学学报(自然科学版),2016,37(2):227-232.
[26]刘刚才,邓伟,文安邦,等.试论金沙江河谷建立沟蚀崩塌科学观测研究站的重要性及学科方向[J].山地学报,2010,28(3):333-340.
[27]王佳希,邓家勇,张岩,等.植被季相变化对三维激光测量切沟地形的影响[J].中国水土保持科学(中英文),2021,19(1):132-140.
[28]顾春雷,杨漾,朱志春.几种建立DEM模型插值方法精度的交叉验证[J].测绘与空间地理信息,2011,34(5):99-102.
[29]慕凯,罗明良,岳彦利,等.基于点云构建干热河谷典型冲沟DEM的参数优选:以析取克里格插值方法为例[J].中国农学通报,2016,32(27):126-131.
[30]朱宁宁,姚方芳.点云密度设置在激光扫描中的应用研究[J].河南城建学院学报,2014,23(1):63-66.
[31]魏舟,李光录,任磊.微地形DEM的最佳点云密度选取[J].水土保持通报,2015,35(6):155-158+163.
[32]李瑾杨,范建容,徐京华.基于点云数据内插DEM的精度比较研究[J].测绘与空间地理信息,2013,36(1):37-40.
[33]杜浩,朱俊锋,张力,等.顾及地形特征的LiDAR点云数据抽稀算法[J].测绘科学,2016,41(9):140-146.
[34]吴红艳,郑粉莉,徐锡蒙,等.不同分辨率DEM提取切沟形态特征参数的转化研究[J].水土保持学报,2016,30(6):147-152+161.
[35]张亚南,朱长青,杜福光.一种基于信息盒维数的DEM适宜分辨率确定方法[J].地理与地理信息科学,2014,30(6):17-20.
[36]何政伟,许辉熙,张东辉,等.最佳DEM分辨率的确定及其验证分析[J].测绘科学,2010,35(2):114-116.
Abstract:To quantitatively study the morphological evolution process of shallow gully,the construction of a high-precision digital elevation model by effective point cloud data can not only ensures the modeling accuracy,but also shortens the modeling time.Based on five groups of shallow gully point cloud data of dry-hot river valleys,this paper firstly determines the optimal point cloud extraction method and parameter value by employing sequential extraction simplification to compare the accuracy of DEM constructed by point cloud under Random,Space and Octree extraction modes.Secondly,the accuracy of DEM is verified by the comparison of two methods:the actual data set and shallow gully cross section.The results show that DEM constructed by the three optimal parameter values have all met the requirements of accuracy and the modeling time has been greatly shortened.Among which,(1)Random model can conveniently retain the required number of point clouds,and its optimal extraction rate is 10%;(2)Space mode can well guarantee the distance between points,and the optimal parameter is the minimum distance of 0.005 m;(3)Octree mode has a strong advantage in spatial division,and the optimal extraction parameter is deep extraction of 11-layer tree;(4)Space mode is the best choice of the three extraction modes.The results can provide a basis for efficiently and accurately constructing shallow gully DEM and studying the morphological evolution process.
Keywords:point cloud data;extraction simplification;shallow gully DEM;accuracy evaluation
基金项目:国家自然科学基金项目(41971015);西华师范大学校级科研项目(19E067)
作者简介:杨枫(1997—),男,硕士研究生,主要从事GIS研究。
通信作者:邓青春(1982—),女,博士,副教授,硕士生导师,主要从事GIS与数字地形研究。E-mail:qingqing123ok@163.com
引文格式:杨枫,邓青春.基于点云抽稀构建干热河谷浅沟DEM及精度评价[J].西华师范大学学报(自然科学版),2023,44(3):279-289.
猜你喜欢
科技资讯(2017年14期)2017-06-22 00:12:45
现代电子技术(2017年12期)2017-06-20 09:22:40
价值工程(2017年14期)2017-05-11 20:26:50
价值工程(2017年12期)2017-05-04 23:30:10
现代电子技术(2017年5期)2017-04-01 00:00:17
科技与创新(2016年24期)2017-03-30 17:22:50
软件导刊(2017年1期)2017-03-06 00:28:18
科技创新与应用(2017年3期)2017-02-18 15:23:09
无线互联科技(2016年13期)2017-01-10 02:28:42
科技与创新(2015年15期)2015-08-04 06:22:45