
小型自动布放水下滑翔机概念方案及应用展望
2023-04-27 16:21:18王天霖
船舶 2023年2期
王天霖 金 翔
(1. 中山大学 海洋科学学院 珠海 519000; 2. 大连海事大学 船舶与海洋工程学院 大连 116000)
0 引 言
水下滑翔机是一种浮力驱动、低能耗的水下航行器,具有结构简单、航程长等优势,目前已在海洋观测活动中得到大量应用[1-2],特别是近年来开展的水下滑翔机组网观测研究,可实现大范围机动式海洋观测,在海洋水文采集和海底地形调查等领域具有重要应用价值[3-5]。
水下滑翔机的概念最早由美国海洋学家STOMMEL提出,其设想了一个由浮力驱动的水下滑翔机组成自主海洋观测网络的愿景,为水下滑翔机技术的未来发展提供了蓝图[6]。在水下滑翔机样机研制方面,美国的研究进展在世界范围内遥遥领先。1991年,WEBB 等[7]成功开发了电驱动的水下滑翔机样机,并在佛罗里达州的瓦库拉泉进行了早期测试。1995年,美国海军研究院同时资助了3 个水下滑翔机项目的研发工作,分别是Webb 公司的Slocum、Scripps 海洋研究所的Spray 和华盛顿大学的Seaglider[8-9]。经过多年的发展,这3 款水下滑翔机逐渐应用于大中尺度海洋观测任务,在实际布放中都有出色表现,并且已经成功实现产业化,成为当前国际上主流的水下滑翔机产品,广泛应用于全球各地的海洋观测任务中。
除美国之外,其他国家水下滑翔机尚处于样机研制、性能试验或小规模生产阶段,其中以法国和中国的研究实力尤为突出。由于国外的技术封锁,我国对于水下滑翔机的相关研究工作起步较晚,但是技术发展迅速。2002年,天津大学最早开始水下滑翔机的研究工作[10],于2005年完成温差能驱动的原理样机[11],2007年研制出“海燕”混合驱动水下滑翔机[12]。2003年,中国科学院沈阳自动化研究所开展了水下滑翔机的基础研究工作,于2005年成功开发出原理样机并完成湖试,2009年成功研制出首台1 000 m 级水下滑翔机“海翼-1000”[13]。
2012年,天津大学、沈阳自动化研究所、华中科技大学和中国海洋大学共同承担了863 计划项目“深海滑翔机研制及海上试验研究”,开展多型水下滑翔机工程样机的研制工作,加速推进了我国水下滑翔机技术工程化[5]。2017年,沈阳自动化研究所研制的“海翼-7000”在马里亚纳海沟完成了大深度下潜观测任务,最大下潜深度达到 6 329 m,刷新了当时水下滑翔机最大潜深的世界纪录[14]。2020年7月,天津大学的“海燕-X”万米滑翔机最大下潜深度达到10 619 m,再次打破水下滑翔机的潜深世界纪录[15]。
与单台水下滑翔机相比,多台水下滑翔机开展同步组网观测可以增强水下滑翔机的观测覆盖范围,实现由点到区域空间的立体观测。此外,通过携带不同种类的任务载荷,可以实现多尺度、多任务并行探测,显著提高海洋观测的作业效率和应用范围[16]。国内外先后开始水下滑翔机编队的研究,公开报道显示,目前最大规模的编队试验中,水下滑翔机数量约50 台。
水下滑翔机是目前水下观测装备中唯一具备长时间、长程机动能力的观测平台,受到海洋观测领域的广泛关注。但是在环境适应性方面,国内外成熟水下滑翔机产品都存在同样问题:由于过重、外形不规则及抗冲击/碰撞能力有限等问题,在使用过程中严重依赖科考船、吊放设备及专业技术团队,导致无法满足普通舰艇/无人平台、难以应对恶劣作业海况,以及缺乏技术支持等环境的使用要求。受制造成本和使用不便等原因影响,水下滑翔机只能在海洋科考等领域少量应用,无法在海洋军事、海洋生产及海洋管理等领域大规模推广。
当前,国内研究机构正在努力开展水下滑翔机小型化研究,如国内天津大学研制出机载抛弃型水下滑翔机“海燕-XA”,仅重10 kg,下潜深度可达1 300 m;沈阳自动化研究所开发的“海翼 Mini”也仅重13 kg,最大续航时间可达2 个月。尽管使用的便利性有所提升,但是这些小型水下滑翔机在续航力等关键指标上大幅缩水,难以满足长期化的海洋观测任务需求。目前国内外还没有适用于大型海洋观测的水下滑翔机设计方案和产品。
实现水下滑翔机从科学研究走向实际应用的关键是降低水下滑翔机的综合成本,包含加工制造、运输投放和使用维护等阶段的全链条低成本,具体研究则涉及水下滑翔机的小型化、模块化、平台适应性、抗震/抗冲击性和再生能源利用等诸多技术瓶颈。大幅降低水下滑翔机全链条成本以及推动水下滑翔机规模化组网应用是水下滑翔机技术领域未来发展的重要趋势和方向。
1 小型自动布放水下滑翔机
目前水下滑翔机的性能指标主要是围绕单机和小型编队设计的,单机作业模式下的水下滑翔机由于强调航程、航速等性能,质量普遍在50 kg 以上,综合成本大于100 万/套,使用过程中严重依赖运载平台、吊装设备和专业技术团队,无法大规模应用。作为大型海洋观测网的节点时,水下滑翔机更强调续航时间、制造成本和平台适应性等,其质量应小于10 kg,综合成本小于10 万/套。按照现有的水下滑翔机技术,如果质量减轻到10 kg 级,电池搭载量将不超过2 kg,续航力会降至500 km 以下或不足20 d, 已经无法体现水下滑翔机的续航优势,不能满足大时空跨度海洋观测需要。
因此,小型水下滑翔机的设计需要综合考虑并同时解决小型化、模块化、抗冲击/抗震以及平台适应性等诸多方面性能,现有的水下滑翔机设计理论和方法难以支持。因而必须突破当前水下滑翔机设计惯性思维的束缚,开拓新的技术路线,在大幅降低水下滑翔机的生产成本之外,避免使用过程中对平台、团队和设备等的依赖,达到全面降低水下滑翔机生产和使用各环节成本的目的。
本文提出小型自动布放水下滑翔机的概念,其核心技术指标包括:
(1)质量:小于10 kg,是目前美国成熟小型水下滑翔机质量的1/5;
(2)潜深:200 m,该深度的海水浅表层蕴含丰富的海洋信息,潜深性能基本满足大部分海上作战、海洋观/探测应用需求;
(3)续航力:不小于2 个月或2 000 km,基本达到传统50 kg 级水下滑翔机的续航水平;
(4)环境适应性:适应舰艇、无人艇及无人机等各种运载平台,能够实施全天候的单人抛投/自动化布放。
本文所述小型自动布放水下滑翔机样机如图1 所示。
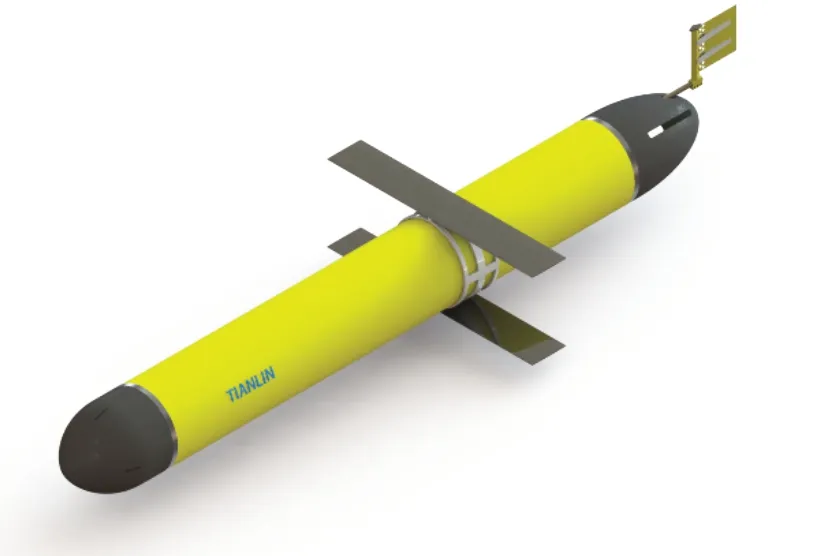
图1 小型自动布放水下滑翔机样机
本文提出的小型自动布放水下滑翔机在外形上和传统水下滑翔机保持一致,长度约为1 m,质量不超过10 kg,但是电池搭载量达5 kg,续航力可达目前50 kg 级水下滑翔机的水平。为了达到这样的效果,就必须大幅减轻除电池外的其他结构的质量,大幅简化结构设计。本文提出全新的不依赖重心调节的水下滑翔机构型机理,考虑利用浮力调节模块在改变排水体积的同时,提供1 个重心的偏移量,从而可以移除常规水下滑翔机的重心调节模块,减轻整机质量并且节省内部空间以搭载更多载荷。
除达到“减重不减续航”目标之外,本文进一步提出如图2 所示的水下滑翔机的封装和自动布放技术,以实现在不同运载平台上的快速批量布放。为了能够把水下滑翔机装进筒形封装结构内,需要对部分组件重新设计,例如采用双层的弹性水平翼和可折叠的尾舵, 并且在艏艉部采用弹性导流罩设计,以提高运输和投放过程中的抗冲击性。
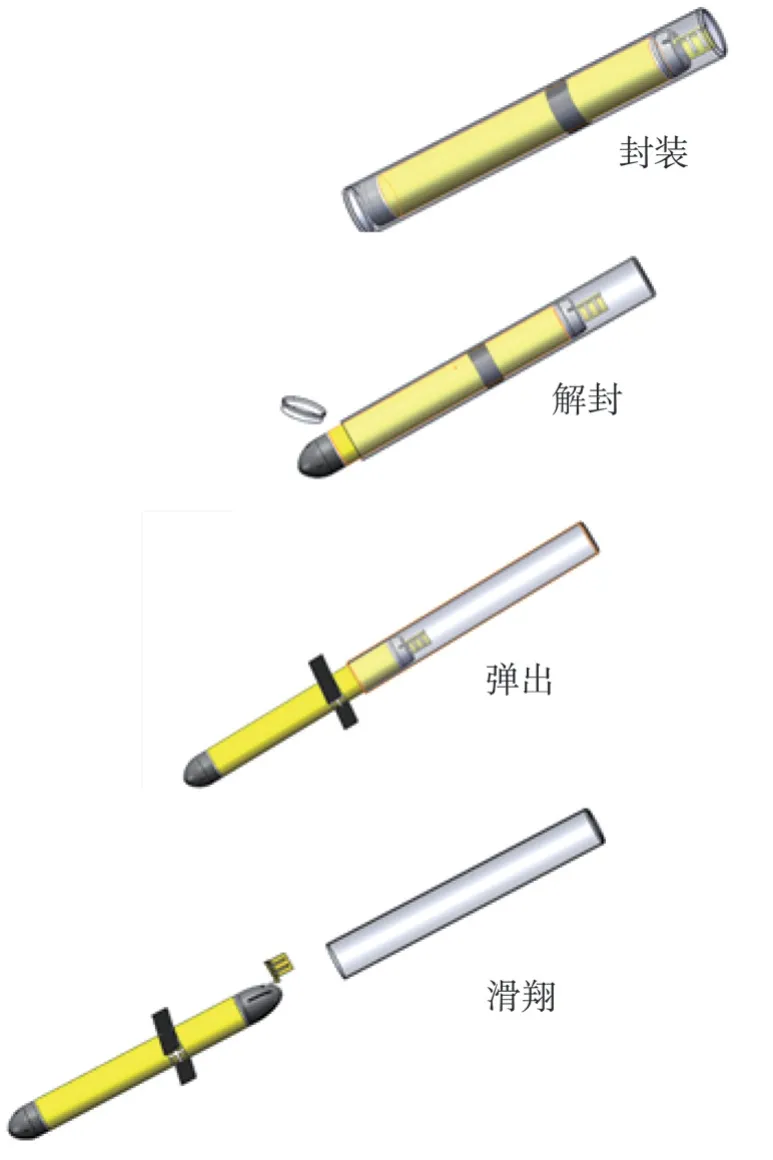
图2 小型自动布放水下滑翔机的封装结构
2 应用场景
小型自动布放水下滑翔机在续航力、平台适应性等方面具有优势,可满足不同专业、不同类型、不同环境条件(尤其是恶劣海况等复杂环境)下的观测设备的应用。自动布放技术可以实现水下滑翔机的批量布放和快速组网观测,可以有效提升观测效率、降低观测成本,为大范围海洋观测提供高机动、低成本和长续航的解决方案,在海洋科考、海洋救灾减灾等军事和民事领域具有广泛应用价值。
2.1 海洋科考
长期以来,应用于海洋科考活动的水下滑翔机体积大、操作不便,需要母船和专业技术团队提供支持,并且高昂的价格使每个航次只能投入少量滑翔机作业,造成很多有价值的海洋科考活动难以开展。本文提出的小型自动布放水下滑翔机,一是成本低,可以在一次科考活动中大量使用;二是操作方便,普通科研人员即可进行布放,无需专业技术团队操作。在批量布放于目标海域后,可以快速组建小规模观测网络,大大提高观测数据的采集效率,使开展更为精细的海洋科考活动成为可能。
2.2 海洋信息预报
基于小型自动布放水下滑翔机的低成本优势,通过快速批量布放大量观测节点,开展大范围、长时间的海洋监测,可以得到更精确的海洋水文数据资料,大幅提高我国的海洋水文预报预测能力,对可能出现的台风、海啸和风暴潮等灾害进行预警,最大限度地减少灾害对人民生命财产造成的损失。
2.3 海洋渔业
基于小型自动布放水下滑翔机组建的海洋渔情监测网络,既可以为渔民提供大范围的渔情信息,又可以提供渔场水域更为详细的渔情信息,使捕鱼作业目标更明确,捕鱼量得到更多保障。此外,还可以向渔业管理部门提供实时的渔情信息,更有利于渔业的精细化管理,对捕鱼的时间、地点和捕鱼量等制定出科学管理决策。
2.4 军事领域
在军事领域,小型自动布放水下滑翔机可以和推进模块以及水声探测、海洋环境、水下爆炸等载荷相结合,利用舰艇、无人艇和无人机等平台批量投放,以集群的方式快速覆盖关键水域,完成战场环境侦察、水下目标搜寻与攻击、战场封锁和介入拒止,以及岛链封锁反制等任务,能够大幅延伸我军作战半径,极大丰富海上作战模式。
2.5 南海超大型海洋观测网
南海超大型海洋观测网是指在我国南海海域投放10 000 个以上小型自动布放水下滑翔机作为海洋观测节点,通过智能控制形成有机可控的超大型南海观测网络。基于小型自动布放水下滑翔机的南海观测网的节点密度将是Argo 全球海洋观测网的500 倍,高密度观测节点能够有效提高海洋观测的时空分辨率,为中尺度、亚中尺度及小尺度海洋动力学研究创造条件。南海超大型海洋观测网覆盖南海主要区域,并在南海长期连续地执行业务化的海洋观测,可以大幅降低南海海洋数据的采集成本,支持南海海洋资源、海洋考古等涉海信息普查;支持大范围海洋水下战场透明化,改变海战模式等。通过采用人工智能技术对大量观测节点进行控制(例如改变节点密度、任务类型以及网络阵型等),可以在不同海域执行各种观测任务,在同一平台上满足不同单位和领域的需求。这种以大量水下滑翔机为主形成统一的海洋数据采集基本框架,能够有效克服海洋大数据发展中存在的数据量小与数据孤岛等瓶颈问题,是海洋数字化探索可行的发展之路。
3 关键技术
小型自动布放水下滑翔机旨在大幅降低水下滑翔机的综合成本(包括生产和使用全流程成本),支持规模化海上组网应用,为此需要突破传统水下滑翔机设计理论和技术体系,解决水下滑翔机的小型化、预封装和自动布放等一系列问题,涉及到的关键技术包括轻量化技术、封装技术、能源利用技术以及智能组网控制技术。
3.1 轻量化技术
由于电池搭载能力在很大程度上决定了水下滑翔机的续航水平,因此,水下滑翔机小型化的难点在于最大程度地减轻其他部分的质量,从而搭载尽可能多的电池。为了发挥长续航优势,目前的成熟水下滑翔机型号都已将轻量化达到极致,但是按照当前技术体系设计的小型水下滑翔机,其续航水平仍然不能满足海洋观测活动的需要。要想达到“减重不减续航”的目标,就必须对水下滑翔机轻量化技术进行颠覆性创新,从构型机理层面突破传统水下滑翔机的概念束缚,在保证主要性能的情况下,大幅简化内部控制结构。本文提出的不依赖重心控制的水下滑翔机构型机理,在传统的浮力驱动和重心调节的设计基础上,去除重心调节模块,利用水动力自动获得滑翔角度,不依赖重心控制机构,从根本上突破了水下滑翔机的设计理念,进而实现“减重不减续航”的目标。
3.2 封装技术
目前水下滑翔机在使用过程中严重依赖人员、设备和平台,使用极不方便,原因在于抗冲击/抗碰撞性能较差、外形尺寸不规则以及容积率低,给运输存储带来极大不便;整体较重,必须依赖吊装设备协助布放和回收;系统复杂,使用前必须由专业技术团队完成部分模块(如水平翼和天线等)的安装和整机系统的调试。基于以上原因,想要摆脱对专业人员的依赖以实现自动化布放,对于当前的水下滑翔机技术是极为困难的。一体化封装技术旨在通过对水下滑翔机的附体结构(包括舵、翼和天线等)重新设计,在不影响水下滑翔机运动性能的基础上,将小型水下滑翔机收纳进筒形封装结构内,其优势在于:
(1)在存储和运输过程中有效隔离环境损伤,确保水下滑翔机性能稳定性;
(2)提高平台适应性,实现在不同载具上快速、大批量布放;
(3)提高海况适应性,实现全天候布放,封装结构使水下滑翔机在入水前完全不受环境影响,入水后封装筒自动打开,水下滑翔机随即启动工作。
此外,尽管小型水下滑翔机可以轻松地实现单人布放,但是为了满足大时空尺度海洋观测的需要,有必要实现水下滑翔机快速批量布放,因而还需要设计与封装结构相匹配的自动布放装置,以实现在无人机和无人艇上的自动化布放操作。
3.3 能源利用技术
当前,水下滑翔机大多依靠机体携带的电池提供能源,以实现运动控制和开展观测活动,续航力受到电池电量的制约,而且传感器等工作载荷更进一步加剧了水下滑翔机的能耗负担,严重限制了水下滑翔机的应用场景。尽管轻量化技术使小型自动布放水下滑翔机可以在有限的质量下搭载更多电池,但是锂电池的能量密度在短期看来很难有质的突破,电池技术越来越成为限制水下滑翔机发展的最大瓶颈。而海洋本身蕴藏着巨大的能量,目前可供利用的海洋能量包括潮汐能、波浪能和温差能等,如何利用这些海洋环境能源为水下滑翔机持续供能是提升水下滑翔机续航水平的关键技术。此外,由于水下滑翔机工作一段时间后需要上浮到水面进行通信,因此也可使用太阳能作为能量补充,此时则需设计合适的外形以最大化利用太阳能。总之,能源利用技术的进步和能量转化装置的小型化将推动水下滑翔机的续航水平达到新的高度,极大地扩展水下滑翔机的应用场景。
3.4 智能组网控制技术
尽管小型自动布放水下滑翔机很大程度上解决了常规水下滑翔机使用不便的问题,但是受限于体积和成本,其单机性能弱于大尺寸的水下滑翔机。因此,只有以大规模组网的形式使用才能最大化其价值,因而亟需解决大量水下滑翔机节点的协同控制问题。不同于通常意义上的小规模集群观测,大型海洋观测网在节点数量上远超后者,当前适用于小规模水下滑翔机编队的控制方法显然难以实现对成千上万节点的有效控制。
考虑到海洋环境的复杂性以及小型自动布放水下滑翔机有限的运动能力和续航水平,有必要开发针对大型海洋观测网络的智能控制技术,利用大数据和人工智能技术,实现大空间尺度下大量观测节点的高性能组网协同控制,以保证观测网络能够充分发挥规模优势,并能够根据任务特点、网络自身运行情况和海洋环境特性实现智能化调控,以提高观测的精度和效率。
4 结 语
本研究旨在解决常规水下滑翔机在成本和使用难度等方面的问题。为此,提出低成本小型自动布放水下滑翔机的概念,并成功设计了10 kg 级别的样机;探讨了小型自动布放水下滑翔机在海洋科考、海洋经济和海洋军事等领域的潜在应用前景,对实现小型自动布放水下滑翔机及其规模化应用所需解决的关键技术难题进行了深入分析,并提出相应的解决思路。
综上所述,小型自动布放水下滑翔机是具有巨大潜力的新技术,有望成为海洋科技领域的重要突破点。
猜你喜欢
军事文摘(2023年18期)2023-11-03 09:45:42
车主之友(2022年6期)2023-01-30 07:59:12
车主之友(2022年4期)2022-08-27 00:58:10
车主之友(2022年5期)2022-04-06 11:54:26
当代陕西(2019年15期)2019-09-02 01:52:04
知识就是力量(2019年7期)2019-07-01 17:33:03
军事文摘(2018年24期)2018-12-26 00:58:00
小学科学(学生版)(2018年12期)2018-12-19 05:13:46
测绘科学与工程(2017年1期)2017-05-04 03:40:44
太空探索(2016年7期)2016-07-10 12:10:15
