水电机组开度模式的复合脉冲调节方法
2023-04-10 06:50郭俊鑫周宇阳方云飞黄爱平
水力发电 2023年3期
郭俊鑫,周宇阳,方云飞,李 镇,郭 波,卢 乔,黄爱平
(1.国家能源集团新疆吉林台水电开发有限公司,新疆 伊宁 835000;2.上海朴宜实业有限公司,上海 200240;3.新华控制工程有限公司,上海 200240)
0 引 言
水电机组并网后调速器一般处于功率模式或开度调节模式。功率模式下,调速器接收来自计算机监控系统的4~20 mA电流信号,一旦此信号受到其他装置的干扰,或者因端子松动、断线等引起信号波动甚至消失,势必造成有功功率的波动,严重时发生溜负荷、甩负荷的情况;而且有功的经常性波动会导致液压驱动设备动作过多,磨损频繁,减少设备使用寿命。相比较而言,开度控制模式下的脉冲信号是稳定而可靠的,因此在实际控制中经常采用。
开度调节模式中常用的PI调节器在机网协调快速响应的运行环境下响应慢、易超调等缺点。何常胜等[1]从PID典型控制策略出发,对开度模式下的逻辑关系进行了探讨,给出了斜坡函数和变参数的建议;邵宜祥等[2]通过混合仿真实验指出,非线性鲁棒控制在水电机组动态调节中能起到较好的作用,蔡卫江[3]则在提升水轮机调速器机网协调能力的技术研究中明确提出了“慢-快-慢”的控制策略以适应AGC控制的快速性和稳定性要求,折线均涉及到复杂的参数整定和逻辑切换。此外,近年来人工智能渐次引入到水电机组调节领域,程远楚等[4]提出了仿人智能控制策略与规则,基于对控制误差的识别来调整控制策略和控制参数,付维圣等[5]提出用遗传算法对水轮发电机组特性进行模糊设计等,揭示了当前技术条件下具备水电机组特性实时而全面把握的能力,为复合脉冲的精准实施提供了基础。
基于此,开度模式中复合脉冲的调节方法被发掘、引入并且逐步得到完善。本文阐述了持续长脉冲和连续短脉冲的设计原理和估算方法,以此形成的脉冲调节器功能与PID调节器有机结合,可以充分体现柔性控制的思想,达到水电有功调节快速而稳定的效果。
1 脉冲调节的优势
1.1 PI调节的弊端
在快速性的要求下,PI参数整定较弱则调节时间变长,整定较强则超调量严重;而随着水库库容的变化,机组最大水头与最小水头之间的差别较大,导致固定参数PI控制下的调节差异更为明显,如图1所示。
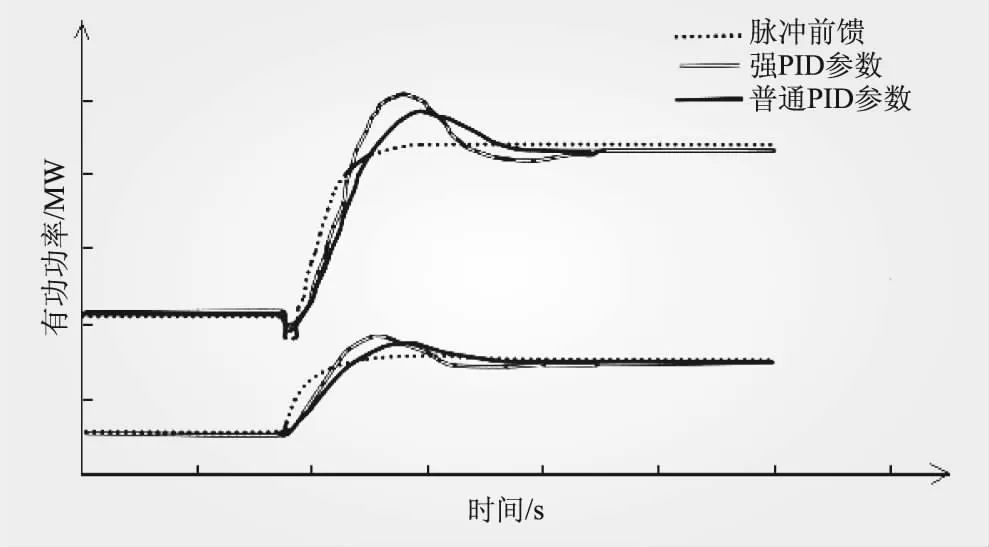
图1 PI调节器与脉冲调节器的实控过程
此外,水轮机组的导叶开度与有功功率呈现出一定的非线性,如图2所示,大数据显示某水电站4台机组存在不同程度的非线性。不同的开度范围内有功功率控制回路的增益不同,这加剧了PI调节的困难,在拐点处容易出现调节振荡。

图2 导叶开度的非线性特性
导叶开度的控制取决于调速器驱动的接力器活塞位移,接力器油压下产生的力矩远大于静水头下的移动力矩,故接力器移动速度与水锤动态过程无关[6],不计接力器行程的初始段和末段,其与导叶开度为线性关系,导叶开度的变化量与接力器动作时间成正比,故而,通过控制脉冲长度即可线性地获得导叶开度,称为脉冲调节。
在机网协调的AGC调度与一次调频成为常态化运行工况时,复合脉冲调节具有的速度优势、电量控制优势以及弹性控制的优势逐渐凸显。
1.2 复合脉冲调节的速度优势
PID调节器本质上是一种反馈调节,调节过程中需要根据过程量的变化来调整被调量的幅度,调节方式是被动的,过程是非均匀的,导叶的最终位置在摸索中获得;相比较而言,复合脉冲调节则是主动式的,在调节过程开始前导叶需要到达的位置已经明确,通过预定的脉冲驱动接力器均匀地到达,具有明显的速度优势,从图1中可以看出。水轮机调节作为典型的非最小相位系统,速度优势相当于加强了控制器增益,系统的反向响应与延迟能够被快速度过。
在大数据与人工智能技术的支撑下,通过智能算法及其并行处理方法[7-8]对水电机组的水力特征进行全方位的跟踪与分析,快速得到目标有功对应的导叶终端位置,为复合脉冲提供准确的定位,使其发挥速度优势成为可能。
1.3 复合脉冲调节的电量优势
复合脉冲的调节过程可以做到可控的快升慢降,即有功调升时快速达标,调降时贴边达标,从而充分地利用网调的调节裕量,获取更多的积分电量,如图3所示。
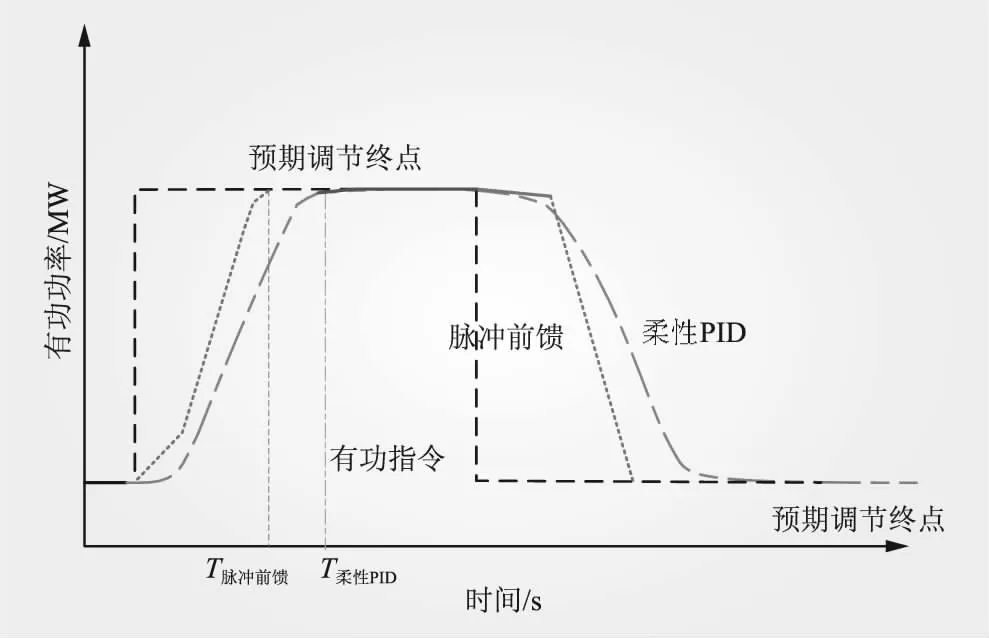
图3 柔性控制方式示意
由于脉冲量的精准可控,使得这种快速贴边式调节同样可行。以汛期为例,一天之内单台机组贡献十次乃至上百次调节频次,机组的机械损耗不容忽视,充分利用网调裕量进行快速贴边调节是完全合理的。
1.4 复合脉冲的柔性调节优势
水轮机调节过程中由于水流惯性导致的引水系统压力反向变化,即水锤效应带来的功率反调不可忽视,需要在减少功率反调的同时又保证有功调节的快速性,主流思路从优化导叶变动速率为切入点,采用柔性控制方式,这对PID调节器带来不小的挑战,参数整定时需要兼顾快慢转折的时机、水头的变化、以及导叶行程的非线性,过程极为复杂。相比较而言,复合脉冲调节在精准获知调节终端位置时,通过脉冲的占空比以及脉冲长度的控制,可以从容地实现折线控制,从而充分体现柔性调节的优势,如图3所示。
2 复合脉冲调节的实现方法
通过设计持续长脉冲与连续短脉冲相结合的调节方式,使得脉冲控制易于实现调节基本目标,并且整体可控地逼近柔性控制。
2.1 持续长脉冲
有功指令变化时导叶开度的变化具有近似线性的特征,持续长脉冲可以快速地完成这个导叶开度变化过程,其前提在于基于水轮机能量特性预置脉冲长度。
脉冲的总调节量Tovr为
(1)
式中,G为导叶开度;UMD为机组有功指令;fT()为水轮机能量特性实时数学模型;Gps为导叶每秒开度;下标1和2分别为调节始态和终态;ps为每秒单位。
根据AGC调节的要求,水电机组必需达到50%MCR/min的速率,其中MCR为机组额定出力,考虑到指令从调度-集控-机组监控系统-调速器的信号传递的耗时且为计算简便,将该速率设为50%MCR/50s,即1%MCR/s,则导叶每秒开度Gps有
Gps×MCR/100≥1%MCR
(2)
即至少有Gps≥1才可以满足基本调节需求。由于脉冲调节的可预测性,在接力器速率限和死区的范围内,按照持续长脉冲的调节方式,如图4中CuCd段所示,调速器若设定Gps为N则具备了N倍的调节速率。

图4 脉冲方式实现的柔性控制

gps=(Tadhff(Touv,Tadh)+fm(Tovr,Tadh))Gps/
[Tadhff(Tovr,Tadh)+Tadh(ff(Tovr,Tadh)-1)+
fm(Tovr,Tadh)]
(3)
式中,ff(Tovr,Tadh)为求商取整;fm(Tovr,Tadh)为求商取余函数。
由于Titv≪Tadh,故有gps较为接近Gps。
2.2 连续短脉冲
持续长脉冲可以达到快速调节的目的,为了实现柔性控制方式,需要设置连续短脉冲达到慢控制的效果,如图4中UCu或CdD段所示。
连续脉冲的占空比D定义为
(4)
式中,Ton为脉冲循环内有效的高电平脉宽;Tcyc为脉冲循环时间。
继而有连续短脉冲的等效导叶每秒开度gps为
(5)
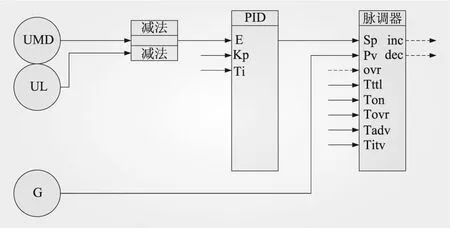
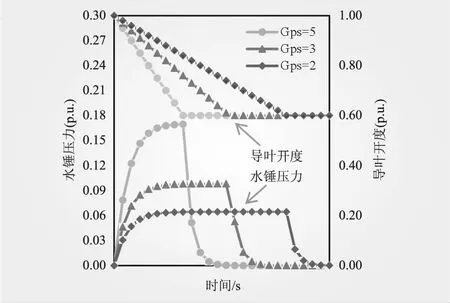
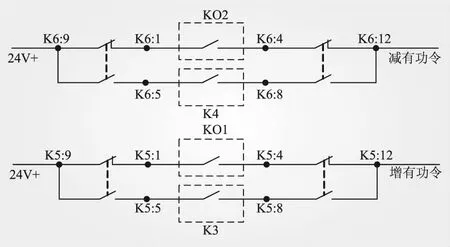
常用短脉冲设置如表1所示,Ton一般小于Tcyc,则连续短脉冲明显有gps 表1 常用短脉冲设置 执行水电机组的过程控制时,通过持续长脉冲与连续短脉冲(本文合成为脉冲调节器逻辑功能块)的复合构建柔性调节的基础上,体现PID调节器与脉冲调节器的有机结合,如图5所示,保留了PID调节器以备脉冲回路故障时控制模式切换的需要,同时当脉冲回路调节失当时,还可以通过PID调节器完成调节补位。图中,UL为机组实际有功,Kp为比例系数,Ti为积分时间,Sp和Pv分别表示设定值与过程变量实测值,G为导叶实际开度,inc和dec分别为增减脉冲输出,其余见文中说明。 图5 基于复合脉冲调节的水电机组控制逻辑结构示意 原则上,脉冲调节器兼备复合脉冲调节和PID调节执行器的功能,当信号ovr置位时,脉冲调节器执行复合脉冲功能,当ovr复位时脉冲调节器转变为PID调节器的执行器。信号ovr的判决条件包括:①脉冲执行回路是否健康;②平行控制器集群是否健康,即是否可靠地获取Tovr参数;③脉冲调节周期完成后是否调节目标仍未达成等。 逻辑结构中,PID调节器的比例项Kp、积分项Ti,脉冲调节器的Tcyc、Titv等均为变参数,逻辑设计时根据UMD以及G的实际值向目标值的逼近程度而整定;此外,Tadh和Titv一般为常数。 组态设计时,需要充分考虑组态页面扫描周期(执行周期)与脉冲执行回路中脉宽之间的协同性,避免出现脉冲实际有效长度被截断或者虚充的现象,这与计算机监控系统和调速器的具体设置有关,不再赘述。 复合脉冲调节过程中,导叶开度的变化速度明显超过常规PID控制,为了保证调节过程中最大压力上升率在规定的范围内,需要进行最大水锤的理论试算。 某水电单元机组设计流量为119.44 m3/s,额定水头117 m,管道直径4.6 m,取行波速度1 000 m/s,则管道特性系数 (6) 管道总长500 m,水锤单相时长Tr=2L/a=1。 显然有ρτ0>1,为末项水锤。根据水锤压力计算通式并取泰勒级数展开,阀门关闭过程中第n相末的水锤压力为 (7) 整理得 (8) 分别取Gps为5、3、2,试算瞬态过程最大水锤如图6所示。在取最大值Gps=5时,最大水锤压力增幅不超过18%。根据GB/T 5186—2004《水电站机电设计规范》之规定,该机组蜗壳最大允许压力上升率不得大于25%~30%,故而在安全裕度之内。 图6 最大水锤压力试算 某水电站装有4台单机125 MW混流式水轮发电机组,参数规格同前例。 现场增设了共水力单元平行控制系统,将调速器开度模式下计算机监控系统有功调节功能转移至该系统中,并纳入PID调节器与脉冲调节器相结合的控制方式,形成基于复合脉冲调节的水电机组开度模式优化控制方法,在各台机组进行了长期试验。 系统间切换和脉冲指令由继电器实现,继电器采用了较为可靠的固态继电器,系统通过增、减继电器向调速器发脉冲指令,通过两个切换继电器实现计算机监控系统和共水力单元平行控制系统的控制权切换。 继电器逻辑设置如图7所示,图中,K3为共水力单元平行控制系统增有功继电器;K4为共水力单元平行控制系统减有功继电器;K5为增有功切换继电器;K6为减有功切换继电器;KO1为计算机监控系统增有功继电器;KO2为计算机监控系统减有功继电器。 图7 继电器逻辑设置 选择持续长脉冲方式进行AGC条件下的单机调节,某日连续经历6次有功指令变动,其过程如图8所示,其中UL为机组实际有功。图中分别标出了90%与50%的MCR/min参考线,当UL落在UMD与50%MCR/min参考线的包络之内则为调节合格。图中显见,调节过程基本控制在90%MCR/min包络之内,调节品质优秀。不过,在小幅度有功变化时,这个优势并不明显,这是由于此时复合脉冲与PID调节器的执行曲线(即导叶开度的实际变化过程曲线)相差无几的原因。 图8 基于复合脉冲调节的单机调节过程实录 由于复合脉冲的执行曲线起步快,其引起的水锤效应显著于PID调节过程,不过由于后继执行曲线保持了这种快速性,水锤引起的功率反调被快速拉回,期间产生的积分电量也会快速复归,因此复合脉冲能够更好地满足AGC快速调节的要求,工程中的长期实践也证实了这一点。 非单机运行,尤其一洞多机同时受控于AGC调节时[9],AGC考核目标为机组组合的总体出力,此时调节初期的水锤效应不可忽视,此外,共水力单元机组之间的水力干扰也容易加剧这个过程,需要实施持续基于长脉冲+连续短脉冲模式的柔性控制并且考虑到水力干扰的不利影响,本文不再展开。 作为水电机组调节的常用模式,导叶开度调节具有稳定可靠的特质,但是计算机监控系统PI调节器调节品质欠佳,有功调节的变载率、超调量、衰减率等指标也较难达到理想的平衡,尤其在机网协调快速响应的要求下,机组有功调节较难满足“两个细则”要求,其原因在于脉冲调节的潜质没有充分发挥出来。本文通过持续长脉冲与连续短脉冲的结合,形成了执行曲线的快慢速率控制,实现导叶开度柔性调节,当水轮机的能量特性被实时而准确地获取时,基于复合脉冲调节的开度模式可以取得足够优秀的调节特性,体现在以下方面: (1)复合脉冲调节下的执行曲线具有近似线性的特性,简单直观,可以大大简化柔性控制的理论计算难度和实现难度,尤其在共水力干扰条件下考虑控制策略解耦与优化时。 (2)在并行计算、超实时计算等新技术应用到工业现场的背景下,计算机监控系统可以充分掌握水轮机的实时能量特性,使得复合脉冲的控制终点清晰、过程明确,从而保证了调节的快速性。 (3)复合脉冲的实施较为简单,对现有系统的改造是增量式的,并不影响原有功能,并且能够与PID调节器有机地结合在一起。
2.3 逻辑结构设计与组态
3 复合脉冲调节过程最大水锤
4 基于复合脉冲调节的工程实践

5 结 论
猜你喜欢
湖南水利水电(2021年6期)2022-01-18
模具制造(2019年4期)2019-06-24
水利规划与设计(2017年8期)2017-12-20
水利科技与经济(2016年7期)2016-04-25
电源技术(2015年9期)2015-06-05
电测与仪表(2015年20期)2015-04-09
电测与仪表(2015年3期)2015-04-09
水利水电科技进展(2014年2期)2014-10-17
水电站机电技术(2014年1期)2014-09-26
大电机技术(2014年3期)2014-09-21