
三维扫描技术在船舶修理中的应用
2023-04-04 06:45冯建明
船舶标准化工程师 2023年2期
冯建明,赵 锐
(上海中远船务工程有限公司,上海 200231)
0 引言
三维激光扫描技术是一种新兴的现代测量技术,其采用激光测距原理,可瞬时测得空间三维坐标[1]。三维激光扫描技术的数据精度高,测量速度快,操作较为简便,具有巨大的效率和成本优势,故其在工业中得到了广泛应用。在船舶修理过程中,外壳曲面换新、舵叶修理、分段精度控制等诸多工作需要使用测量技术。由于传统的测量工具和方法具有较大的局限性,三维激光扫描技术在船舶修理领域具有广阔的应用前景。本文对三维扫描技术的原理进行分析,并对其在船舶修理中的应用进行介绍。
1 项目概况
在本项目中,由于原船舶设计有误,平行中体长度不足,需要在艉部靠近平行中体处增加外挂结构以弥补缺陷。新加结构长约12 m,高约5 m,见图1。由于新增结构所在区域为双曲船壳,需要得到壳体的线型值(描述船体形状的三维坐标点)[2],并绘制相应线型图。由于线型图为船厂的保密资料,一般不会在完工图纸中随船提供该资料,故需要通过测量的方式得到原船的线型数据,进而确定新加结构与原船结构的接触曲面。
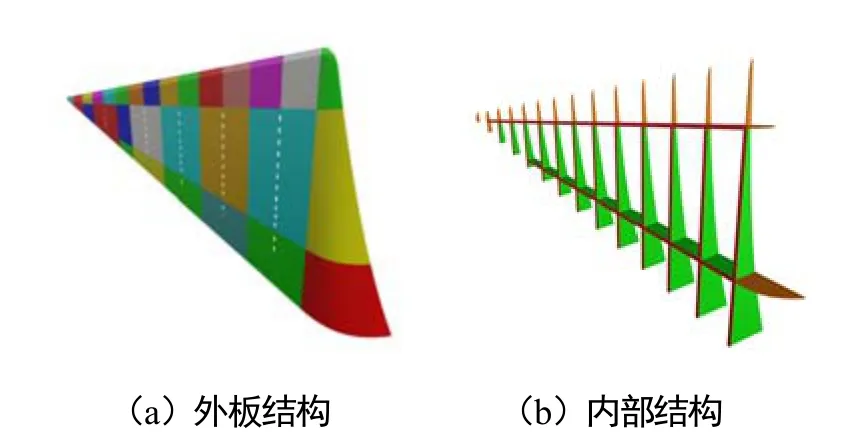
图1 新加结构示意图
2 问题分析
根据以往经验,可采用2 种方法解决原船线型 缺失的问题:1)扁铁样条法,即沿原船外壳制作样条扁铁;2)PDF 描线法,即找出此区域每个剖面的结构图,扫描成PDF 文件,并利用计算机辅助设计(Computer Aided Design,CAD)软件描绘出样条线。本文提出一种3D 扫描方法,相较于传统方法,该方法精度最高,但对专业设备和船厂硬件实力的要求比较高。3 种方法的优缺点对比情况见表1。对于本项目,施工区域在扫描范围内,且船厂已配备3D 扫描仪,故3D 扫描方法是最优方法。

表1 获取线型数据方法比较
3 工作原理
三维扫描技术主要利用激光测距原理来获取目标数据[3],在工作时,以扫描仪中心为原点进行360°旋转,并向外发射激光脉冲至目标对象的表面。通过计时系统记录激光从发射到返回的时间,利用测角系统捕获扫描仪与被测物体间的水平角和竖直角,通过系统集成的驱动马达和激光转向镜对扫描区域进行覆盖式扫描,进而实现被测物体三维坐标的采集。通过几何关系计算物体的位置信息,并保存扫描点的坐标值,若是彩色扫描,则将色彩数据连同坐标值一起存储。三维扫描技术测量速度快、精度高,在本项目中,黑白扫描仅需3 min,彩色扫描仅需6 mm即可完成,误差可以控制在0.03 mm/m。
4 操作流程
使用三维扫描仪进行船壳修理的操作流程如下所示:
1)船舶停靠在码头上,收紧缆绳,尽量避免船舶移动,挑选风浪较少的时段进行测量。
2)找出船舶外壳上的标记点,如分舱标记、水线和甲板边线等,以便在后期处理数据时获取定位信息。
3)选取合适的三维扫描仪摆放位置,设置扫描范围及其他相关参数。
4)开始扫描,在扫描过程中,严禁无关人员和车辆进入扫描范围,以免对扫描形成干扰。
5)扫描完毕,通过扫描仪自带的数据处理软件进行数据整合和转换,并生成可在CAD 中打开的格式文件。
6)在CAD 中打开扫描得到的点云数据,找到标记特征点,并将船体按坐标位置摆放正确。
7)在CAD 中截取若干截面,生成样条曲线以便后期光顺操作时使用。
8)将提取得到的样条曲线导入船体三维软件 进行光顺处理,生成可用于生产设计的曲面。
5 数据处理
做好数据的整合处理,准确提取有用的信息对于三维扫描技术在船舶修理中的应用特别重要。将扫描仪得到的点云数据导入CAD 软件,三维激光扫描仪的点云数据处于其自定义的扫描坐标系中,其内部各点的相对位置不会变动,且与实物外形相匹配。截取截面,将数据点连成线,进而创建光顺的曲面。点云数据文件在CAD 中的效果与照片类似(见图2),但将其局部放大后,可以看出实际由密密麻麻的数据点构成(见图3)。

图2 点云数据在CAD 中的效果
图3 点云局部放大图
在进行扫描操作时,船舶处于浮态,即使将前后缆绳收紧,并挑选风浪良好的时段进行测量,船舶还是会产生幅度约100 mm 的晃动,晃动产生的影响会直接反映在点云中,导致产生里、外两层图像,两层间的距离大概为15 mm。
为尽可能消除船舶晃动的影响,取点连线时要统一选取同一层。在曲线绘制完成后,做好记录,为下一步数据处理做好准备。
在原始线型提取完毕后,利用点列表查询工具得到样条线的坐标点,复制到Excel 表格中,根据船体三维设计软件Tribon要求的数据点格式生成相应的文件。接着将线型进行光顺处理,得到光顺曲面,并导入到结构模块中进行生产设计。
6 结果对比
在根据三维扫描的数据得到曲面后,接着进行生产设计阶段。为保险起见,在新加结构与原船外板相接的地方加放30 mm 的余量。将结构模型与点云叠放在一起进行对比以检验三维扫描技术所得曲面的误差,结果见表2。

表2 型线误差值
由表2 可知,三维扫描技术的误差基本可控制在30 mm 以内。在实际安装时,还可进一步缩减加设余量。本项目的三维模型图和完工状态图分别见图4 和图5。

图4 三维模型图

图5 完工状态图
7 结论
作为一种新兴的现代测量技术,三维激光扫描技术在船舶修理领域具有广阔的应用前景。本文分析了三维扫描技术的原理,并结合具体项目介绍了三维扫描技术在船舶修理中的应用情况,可得到如下结论:
1)新加结构与原船贴合完美,这说明对于小范围的船壳曲面修理工程,采用三维扫描采集到的点云数据进行曲面生产设计是切实可行的。
2)与常规现场测量方法相比,三维激光扫描方法测量简便,精度更高,数据更加全面,具备较高 的推广价值。
希望本文的研究能够为三维扫描技术在船舶修理中的应用提供一定参考。
猜你喜欢
安徽师范大学学报(自然科学版)(2022年3期)2022-07-14
江西建材(2018年4期)2018-04-10
制造技术与机床(2017年7期)2018-01-19
软件(2017年6期)2017-09-23
计算机测量与控制(2017年6期)2017-07-01
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
核科学与工程(2015年3期)2015-09-26
现代营销·经营版(2015年3期)2015-04-20
计算物理(2014年1期)2014-03-11
现代营销·经营版(2013年5期)2013-05-14
