
6G车联网络通感融合方法与性能仿真*
2023-03-31 11:55林育哲亢晨宇王鑫洋
移动通信 2023年3期
林育哲,亢晨宇,王鑫洋
(北京邮电大学,北京 100876)
0 引言
车联网作为未来智能交通系统的重要组成部分,是实现智慧出行、智慧交通的重要技术。自动驾驶、远程驾驶作为车联网场景的关键技术,深刻影响着车联网的发展进程[2]。自动驾驶等新兴业务对车联网络提出了通信高容量、高可靠、低时延的需求,移动研究院提出远程驾驶类场景下行时延应小于20 ms,上行速率大于60 Mbps,下行可靠性大于99.999%,定位精度小于1 m;信息服务场景上行速率大于200 Mbps,下行速率达1 Gbps,而现有车联网技术无法满足需求[3]。IMT-2030 推进组将通信感知融合技术作为未来6G 网络的关键技术之一,通信感知融合技术作为一种基于软硬件资源共享同时实现感知与通信功能协同的新型信息处理技术,有望赋予蜂窝基站无线定位、环境感知的能力,以进一步推进自动驾驶等车联网络技术的发展[1]。因此,通信感知融合技术在蜂窝车联网中的应用近年来成为学术界和产业界关注的焦点。
近年来学术界为推进车联网络通信高速率低时延做出了诸多努力,文献[4]针对车辆高速移动引起的通信链路不稳定导致车辆位置信息上报不准确的问题,提出了一种基于通信节点无线感知辅助的车联网下行无线资源分配方法,获得了更好的下行通信性能以及更高的感知误差容忍度。文献[5]针对高速移动环境,分析研究能量检测MIMO 技术在下行多用户通信链路的应用,并验证了在高速移动环境下MIMO 高效可靠通信技术的可行性与有效性。文献[6]基于V2X 单播系统,提出新型非正交多址(NOMA)技术方案,解决实现低时延和高可靠性问题中的频谱效率调度和资源分配方案技术障碍。文献[7]通过调整波束宽度配置,将毫米波发射机同时调度到多个车辆进行通信传输,研究表明方法获取了自动化车辆业务所需的高带宽和数据速率要求。文献[16-17]研究了基于RIS 地最大化速率发射功率分配算法,并与中继辅助通信进行了对比验证,仿真结果说明在宽范围与之速率下具备相移优化地RIS 辅助车联网络更加节能。文献[18]基于空间相关瑞利衰落MIMO 信道,提出了多小区协同导频分配算法,仿真结果证明相较传统导频正交方案能够有效提高V2V 通信链路频谱效率。
另一方面,通过赋予基站无线定位、环境感知能力,可以极低的时延获取高精度的车辆信息及车辆周边态势信息,实现低时延高安全性的业务需求。IMT 2030(6G)推进组在《6G总体远景与潜在关键技术》白皮书中提出,6G 可以利用通信信号(参考信号DM-RS/SRS、同步信号块SSB、数据有效载荷)实现对目标的探测、定位、识别、成像等感知功能[9]。已有研究提出了一种时分体制通感一体化方法,并基于5G 毫米波硬件平台对探测目标位置精度进行了验证,证明了所提方案的可行性[8]。文献[10]提出将时隙划分为训练时隙和数据时隙,分别用于感知和通信,提出MIMO 下的最优预编码方案。文献[11]基于空分体制下的单波束模型,利用信号主瓣对目标进行感知估计,旁瓣用于通信传输,实现通信感知一体化功能。有学者将OFDM 信号结合chrip 信号进行通信感知一体化波形设计,OFDM 相互正交的两路信号分别携带通信信号雷达感知信号,完成通信感知功能的融合[15]。2017 年,Hadani 等人首次提出了OTFS(Orthogonal Time Frequecy Space,正交时频空间)调制方案,此方案旨在将衰落、时变的无线信道转换为与一个时间无关的信道,即时延多普勒信道[19],依靠其良好的抗信道双选择性引起了学术界和产业界的诸多关注。有学者提出一种在高动态场景下基于OTFS 的感知目标距离和速度信息信号处理方法,证明了基于OTFS 的一体化波形在速度信息感知方面精确度优于OFDM 一体化波形[20]。
综上所述,目前已有研究对通信感知一体化技术的初步探索,本文在前述研究的基础上,聚焦车联网场景通信、感知需求,提出一种以通信信号为中心,基于5G 帧结构、通感信号时频域正交体制的通信感知融合方法,并通过系统级仿真分析研究不同时频资源配比下所能获得的网络通信/感知性能。
1 系统模型
本文所研究的通感融合车联网系统模型如图1 所示。通感融合层为架构的核心,基于通感信号时频域正交体制为基站侧的无线感知能力做支撑。基站侧采用适配现有NR 物理层的通感信号时频正交的帧结构,并以全球导航卫星系统(GNSS,Global Navigation Satellite System)作为同步信息来源。将OFDM 信号作为物理层支撑通信感知能力的发射信号,利用其抗频率选择性衰落、抗多径干扰等特性获得良好的通信性能,并借助其正交多载波调制特性获取一定的感知能力。在感知时隙内,基站侧对无线感知信号的反射回波进行信号处理,基于多普勒频偏、时延特性提取出感知信息,完成对终端的探测、定位功能,并上报感知信息至云端。云端主要分为应用服务层和平台服务层,平台服务层为高清地图采集、车辆编队等车联网典型业务提供平台支撑能力,同时基于基站侧上报的感知信息提供安全控制管理、资源部署管理等功能,云端可进一步辅助基站侧完成决策控制、资源管理等功能。终端侧包括车载终端、交通信号设备、路侧行人等,作为基站侧无线感知探测目标。

图1 通感融合车联网系统架构
具体而言,本文聚焦无线车联网,车辆分布在10 392 m×24 m 的双向6 车道高速公路上,包含6 小区18 扇区。基站与车道平行,部署在距离车道35 m 处的位置,基站间的距离为1 732 m。高速场景中前后车间距离符合均值为2v车的指数分布,其中v车为车辆移动速度,使不同车辆速度下具有不同的车辆密度。
如图2 所示,所有基站具备通信感知融合功能。在发射端,利用确定性数据具备反射波探测感知功能的特性,将其映射到OFDM 符号上,并通过数字、模拟预编码最终映射到物理天线上发射到自由空间。为避免通信信号随机性特点对感知性能的影响,采用时频域资源划分的方式使两种信号相互正交。
在回波信号接收端,利用确定性数据序列的特点,分析原始发射数据信号与接收回波信号的多普勒频偏及时延差,以提取感知目标的速度、距离信息。通信感知融合的无线车联网体系架构示意图如图2 所示。
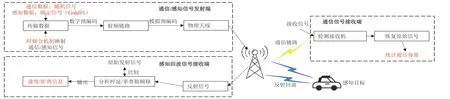
图2 通感融合车联接入网示意图
2 时频域正交的通信感知融合方法
本文所提出的通信感知融合方法基于现有5G NR 物理层帧结构设计,以OFDM 符号作为通信感知融合信号基础,同时将子载波用于相位编码雷达进行感知。具体而言,基站可利用同步信号块(SSB,Synchronization Signal Block)探测、定位等感知功能实现基站侧的通信感知融合[9],SSB 信号在时域由4 个连续的OFDM 符号组成,频域上由240 个非连续的子载波组成,主要用于小区搜索和同步。但SSB信号随时间变化不规律,且在时频域上的梳状非连续分布特性,影响其感知性能(现有商用DDDSU 5 ms 单周期的上下行时隙占比如图3 所示)。本文采用确定性数据序列(m 序列、Gold 码)映射在OFDM 符号上,利用其确定性数据特性,基站将发射端调制符号与反射回波接收调制符号进行对比,基于多普勒频偏和时延差分析出移动终端的速度和距离信息,实现车联网场景下基站的通信感知功能融合。

图3 5G NR现行帧结构(DDDSU 5 ms单周期)
在感知回波信号接收端,采用基于频域的估计距离和多普勒频偏算法对探测目标的距离和速度信息进行参数估计[11]。OFDM 基带信号可表示为:
其中,Ns为OFDM 符号数,Nc为子载波数,aμ,n表示调制在第n个子载波上的第μ个OFDM 符号,fn表示子载波频率,g(t/T) 表示时宽T的脉冲成型滤波器。经过调制的OFDM 时域发射信号可表示为:
其中,ST表示发送调制符号。目标反射回波的基带信号可表示为:
其中,Aμ,n表示衰减系数,R为目标距离,fD为目标相对运动引起的多普勒频偏,c为电磁波在自由空间的传播速度。接收调制符号可进一步表示为:
其中,D(μ,n) 包含了第n个子载波上的第μ个OFDM 符号上目标的距离-多普勒频偏信息。进一步构建维度为Mn×Mμ的时间窗矩阵。
其中,Mn为频域上截取的时间窗长度,Mμ为时域上截取的时间窗长度。进一步对D进行分解:
3 性能仿真与分析
3.1 仿真假设与仿真参数
为验证本文所提的基于时频域正交通信感知融合方法性能,本文搭建了系统级仿真平台。其中,平台的物理层帧结构设置为子载波间隔15 kHz,一个子帧等于一个时隙,包含14 个OFDM 符号,持续1 ms 时间;在频域上设置中心频点为5.9 GHz 带宽为100 MHz,上下行物理共享信道可占用其中500 个资源块(RB,Resource Block)用于无线通信/感知。并在仿真中设置长度为毫秒的通感周期,包含一个连续的长度为X毫秒的感知时间窗和一个长度X-n毫秒的通信时间窗,感知时间窗位于通感周期的首部,如图4 所示。在感知时间窗内,用于目标探测的通信信号占用全部时隙资源和部分子载波频域资源进行无线感知,获取的探测目标感知信息作为通信时间窗内通信容量增强的感知信息来源。在通信时间窗内,用于无线通信的通信信号占用全部时频资源。

图4 系统级仿真物理层帧结构设置方法
仿真中的通信参数参考3GPP TR37.885 中对车联网高速场景的规定[12-13],感知功能相关的参数基于本文的仿真假设进行人为设定,主要的仿真参数如表1 和表2 所示。V2N 链路信道模型参考TR37.885 中的道模型。

表1 通信仿真参数设置

表2 通信感知融合仿真参数设置
3.2 通信感知性能指标
为表征通感融合无线车联网下通信能力与感知能力的相互影响,对通信能力、感知能力的评判标准进行说明。通信性能采用单位时间基站吞吐量指标,如式(8):
其中,Nue为终端车辆数,Tp为通感周期,Tsens为感知时间窗,datai,t为第i个用户在t时刻的下行通信数据传输量。
在感知方面,本文对探测目标的距离、速度信息进行联合参数估计,将估计值与真实值的均方误差(MSE)作为感知性能指标,如式(9):
其中,er,MSE和ev,MSE分别为感知距离/速度信息的均方误差,rest,i,t和vest,i,t分别为第i个用户在t时刻的距离/速度信息估计值,rreal,i,t和vreal,i,t分别为第i个用户在t时刻的距离/速度信息真实值。
3.3 仿真结果分析
首先,利用仿真平台仿真了全部时频资源用于通信信号时,所能够达到的通信最优性能,用于后续通感融合场景下的性能对比依据。如图5 所示,在通信系统下,对基站侧天线配置(8,12,2,2,1)下不同TXRU 射频通道数对系统下行容量的影响进行仿真评估。仿真结果表明,64TXRU 基站天线配置相较于16TXRU 天线配置下行通信容量提升38.62%,频谱效率达到16.27 bps/Hz。后续通感融合系统下选取192 振子、32TXRU 作为天线配置。
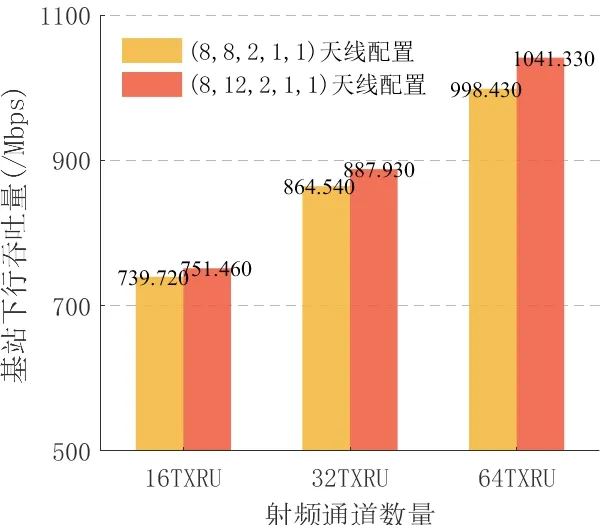
图5 不同天线配置下下行通信容量
其次,对全部时频资源用于感知信号时所能够达到的最优感知性能进行仿真,仿真结果表明,在100 M 带宽资源配置下,距离感知误差和速度感知误差均达到10-1数量级,感知数据与实际数据的均方差分别为0.543 3 和0.017 3。
图6 至图8 仿真了在本文所提通感融合方法下,不同时频资源配置策略对通信/ 感知性能的影响。其中,图6 表明了感知资源在时域上占用固定的5 个时隙(70RE)时,频域上子载波数量对通信/ 感知性能的影响。由于感知速度信息主要受OFDM 符号数量影响,随频域占用子载波数量增加,速度感知精度基本不变,而距离感知精度大幅提升,相较于512RE 下33.21 的感知距离信息均方差,4 096RE 配置下达到0.982 8 的感知距离精度提升两个数量级;但在通信性能方面,4 096RE 频域配置由于占用较多的通信频域资源,因而相较于512RE 频域配置下871.38 Mbps 的下行通信容量下降了5.0%。1 024RE频域配置下下行通信容量达到867.37 Mbps,同时距离感知精度达到8.55,保持了较好的通感能力,性能较为折中。

图6 不同频域资源配置下通信感知融合性能
图7 表明了感知资源在频域上固定4 096RE 配置时,时域上时隙数量对通信/感知性能的影响。随时域占用时隙数增加,距离感知精度微弱降低,维持在10-1数量级,而感知速度精度显著提升,时域20 个时隙配置(280 OFDM 符号)下感知速度精度达到0.033 5,相较于时域5 个时隙配置下10.04 的精度有三个数量级的提升。由上述仿真结果分析可知,感知距离信息主要受子载波数量影响,感知速度信息受OFDM 符号数量影响,因而时隙数量的增加对距离精度影响较小,对速度精度的影响较大;在通信性能方面,时域5 个时隙配置下下行通信容量达到827.37 Mbps,随时域时隙配置数量的增加,下行通信容量受损严重,20 个时隙配置下容量下降15.8%。由上述仿真结果可知,由于系统分配较多资源用于基站感知,尽管感知性能得到相应提升,但通信性能受损严重。在采用10个时隙资源配置时,感知速度精度达到4.43,同时通信容量到达784.40 Mbps,保证了良好的通信性能。

图7 不同时域资源配置下通信感知融合性能
通过图6 和图7 对比分析出,由于感知距离精度主要受频域子载波资源数量的影响,距离信息均方差在101~10-1数量级之间变化;感知速度精度主要受时域时隙资源(OFDM 数量)的影响,速度信息均方差在101~10-2数量级之间波动。同时,过多的时频资源用于无线感知时,会造成通信性能的显著损耗,为获取最优通信-感知联合性能,进一步对折中资源分配方案进行仿真分析。
如图8 所示,在时域资源10~20 个时隙、频域1 024~2 048 个子载波用于感知数据时,下行通信容量在780—860 Mbps 之间波动,相较于通信系统下达到的967.22 Mbp 下行峰值通信容量,性能损失较少。感知距离均方差保持在100数量级,感知速度信息在10-1~100数量级之间变化,相较于感知系统下达到的10-1数量级距离和速度精度,性能损失较小。因而,在本文提出的通信感知融合车联网络中,基站侧感知数据采用时域10~20 时隙、频域1 024~2 048 子载波的资源配置方案,能够获得较优的折中通信-感知融合性能。由上述分析推断出,柱3 相较于柱2 频域资源增加,时域资源减少,出现感知速度精度变低,距离精度变高的情况;而柱4 相较于柱2 频域资源增加,时域资源不变,导致相较柱2 距离精度变高,速度精度几乎不变的情况;基于以上两点,在柱3 出现了折线交叉的现象。

图8 时频域资源配置下通信感知融合性能对比
由上述分析可知,本文所采用的通信感知融合方法能够支撑无线车联网获得良好的融合网络性能,在5.9 GHz 频点,100 MHz带宽,通感周期100 ms情况下,配置时域10~20时隙、频域1 024~2 048 子载波用于无线感知,能够获得较优的折中通信-感知融合性能。
4 结束语
本文首先提出基于NR 帧结构,采用确定性数据序列映射至OFDM 符号,基站将发射端调制符号与反射回波接收调制符号进行对比,基于多普勒频偏和时延差分析出移动终端的速度和距离信息,实现车联网场景下基站的通信感知功能融合。其次,本文搭建了基于上述方法的通信感知融合无线车联网系统级仿真平台,并对不同时频资源配置下的网络性能进行仿真测试,并获得了较优通信感知融合性能,证明了融合方法的可行性。最终从仿真结果中分析可知,在5.9 GHz 频点、100 M 带宽、通感周期100 ms 情况下,配置时域10~20 时隙、频域1 024~2 048 子载波用于无线感知,下行通信容量达到850 Mbps,感知速度和距离精度达到10-1数量级,能够获得较优的折中通信-感知融合性能。
猜你喜欢
舰船科学技术(2022年22期)2022-12-13
无线电通信技术(2022年3期)2022-05-22
铁道通信信号(2018年9期)2018-11-10
雷达学报(2018年3期)2018-07-18
中华诗词(2018年2期)2018-06-26
中华诗词(2018年1期)2018-06-26
舰船电子对抗(2016年3期)2016-12-13
广西大学学报(自然科学版)(2016年5期)2016-11-12
火控雷达技术(2016年1期)2016-02-06
电测与仪表(2015年3期)2015-04-09
