
基于三维激光扫描技术的变电站精细建模技术研究与应用
2023-03-27 03:42叶子玉
农村电气化 2023年2期
叶子玉
(中国电建集团西北勘测设计研究院有限公司,陕西 西安 710100)
三维激光扫描技术最早起源于1960 年左右,可以迅速获取物体的空间数据的方式短时间内采集现实信息。1980 年以后,三维激光扫描技术在中国测绘领域逐渐落地生根[3]。随着三维激光扫描设备性能的提升以及成本的降低,它成为测绘领域的热点,扫描对象和应用领域逐步扩大,成为快速获取空间三维模型信息的方式之一[4]。
变电站是电力系统稳定运行的关键一环[5],变压设施的管理也日趋成熟。目前正发展的如火如荼的智慧变电站、机器人巡检、故障模拟、改扩建再设计等都对变电站的数据模型提出了更高的需求与期待。
为此,本文采用了三维激光扫描技术,结合3ds Max 成熟的建模作业流程,在保证安全的前提下,采集了已投运变电站的现场数据并实景复原其三维模型,实现了变电站的实景逆向设计,保证了现场施工人员的安全,加快了现场施测的进度,提高了精细模型的建模效率。
1 工程概况
本文中330 kV 滈河变电站位于陕西省西安市,属于常宁新区规划范围,占地面积16 000 m2[6]。滈河变电站于2022 年实施扩建方案并于当年6 月顺利投运。在该站已投运的状态下进行施工,施工难度较大,其中GIS 设备构造复杂且设备布置较为密集。
2 三维激光扫描技术
三维激光扫描仪的基本原理是激光测距。为高效复现出虚拟的目标物三维模型,扫描仪高速测量并记录目标对象外表大量激光反射点的三维坐标、反射率和纹理等信息[7]。再通过这些密集的点云信息,利用数字化手段三维构建出现实空间中的目标对象模型。
目前的精细化三维激光扫描建模作业流程总体可以分为3 个阶段,现场实测扫描、点云数据处理、精细模型搭建[8]。
3 基于三维激光扫描技术的数据采集与处理
3.1 点云采集
点云采集工作之前须进行现场踏勘与资料收集工作,在踏勘时须拟定大致勘测方案,留意现场已有的控制点,扫描目标物的分布,环境结构特点和精度要求且确定控制网等级与规划控制网的网形;收集现场机器设备的资产编码,空间布设,逻辑连接等有关资料。对施测场地有了一个初步的了解后,制定外业采集施工方案[8]。
现场数据采集开始之前,须对仪器进行检校并规范使用。
现场扫描过程中,在空旷开阔的视野中采用大型三维移动扫描测量仪,扫描范围较大,精度较高,可移动,适用场景广泛。在狭小拥挤的设备设施中间,须采用手持三维激光扫描仪,质量轻巧,移动自由,使用方便。数据采集开始后,在设备摆放密集的滈河变电站110 kV 区域等,可在原有10 m 一站的基础上,加站扫描以丰富有遮挡的局部区域信息,保证现场采集的点云完整性以及色彩真实性。相邻两站之间扫描采集的点云重叠度应高于10%,用于后期坐标转换的标靶控制点至少大于3 个,滈河变电站采集标靶共计7 个。该变电站采集重要设备包括3 个主变压器、3 组站用变、6 组电容、330 kV 设备区18 个间隔、110 kV 设备区等;设施包括主控楼、330 保护小室、110 保护小室、35 kV配电室等,如图1 所示。

图1 滈河变电站标靶位置示意图
3.2 点云处理
现场单幅数据扫描完成后,对整个场站中的数据进行拼接。使用标靶和公共特征点进行数据拼接时,相邻两扫描站的公共标靶个数≥3 个[9](仪器经过严格整平时,相邻两扫描站的公共标靶个数可≥2 个),拼接后同名点的误差应≤2 mm,整个场站误差应≤10 mm[10]。
采集过程中,往往存在公共的重叠区域以便拼接配准,但也会导致一定量的数据冗余。为优化数据质量,减小冗余,拼接完成后仍须细化点云模型。对点云数据中远离设备设施的异常点、孤立点或与扫描对象无关的点时应采用滤波和人工降噪除杂等处理;综合点云模型的数据大小和后续3ds Max 的承载能力,宜对局部规则体的点云数据进行抽稀处理,如一些规则的隔断墙、简单的规则建筑等。抽稀的目的在于减小冗余,应在以不影响设备设施特征的提取与识别为前提下进行,抽稀后的最大点间距不得大于2 mm。
完成后对点云进行封装处理,使得离散点云成为一个完整的块体,如图2 所示。

图2 滈河变电站整体点云模型
3.3 影像采集
采集影像之前须关注天气变化,阴天采集的影像可避免过度曝光与失真等问题,数据效果比晴天更好。
由于变电设备普遍较高,设备顶部是架站式扫描仪的采集盲区,须采用无人机来补充信息。航拍主要采集变电站正射影像与设备设施顶部信息。
为后续搭建模型提供现场真实的图像,地面影像数据采集使用单反相机收集设备设施的整体情况,具体细节,纹理图案,铭牌编号等。
4 基于3ds Max 的精细建模与导出
由于变电站内部的电气设备数量较多且布局复杂,第一步从单体设备入手建立单体设备的简单模型,在简单模型的基础上深化优化细化局部细节,结合点云,影像,设计资料等对视线范围内的关键构件进行建模,如表计,操作机构等,以此形成标准模型。第二步,为贴合真实效果,现场采集的影像资料可用于纹理图案的制作。经过透视裁剪展平纹理图片,结合场地内的灯光环境,制作符合实际情况的设备设施贴图。再将处理好的贴图纹理直接赋予相应的设备面。最后整合模型,将同一设备的各个构件附加在一起形成一个对象,并对其进行编码。如有多站点建模,每个站点的单独设备个体完成后可加入标准设备模型数据库,在后期的建模中实现调用,如图3 所示。

图3 精细建模工作流程图
4.1 单一模型建立
4.1.1 简单模型创建
在3ds Max 中制作的模型基本都是由简单的几何体拼接形成的。标准几何体包括立方体、柱体、球等基本的几何对象。扩展几何体涵盖了大部分的切角几何体。通过样条线可创建一些线条类的模型,导线、电缆等。
4.1.2 复合模型创建
精细且复杂的几何体模型不仅仅依靠几何体的堆叠,也可在简单几何体的基础上根据点线面等的位置做更多的编辑以达到高效逼真的模型效果。
实操过程中,复合模型的操作可在点线面体不同程度的层次实现。
焊接操作可将不同物体上的多个顶点合为一个。该操作可实现多段导线的合并。
挤出对象可根据选中截面或边在特定方向进行拉伸。该操作可实现旋钮的齿轮效果等。
插入操作可在选中的面中缩放创建一个新面。在此基础上,可实现例如,建筑物的雨棚、蓄水池等。
复合对象中布尔运算作用于几何体的堆加与切割。通过多个几何体的交集、并集、差集运算,可实现例如穿孔、浮雕等效果。
复合模型的创建往往伴随了多种操作,不仅限于以上,如图4 所示。
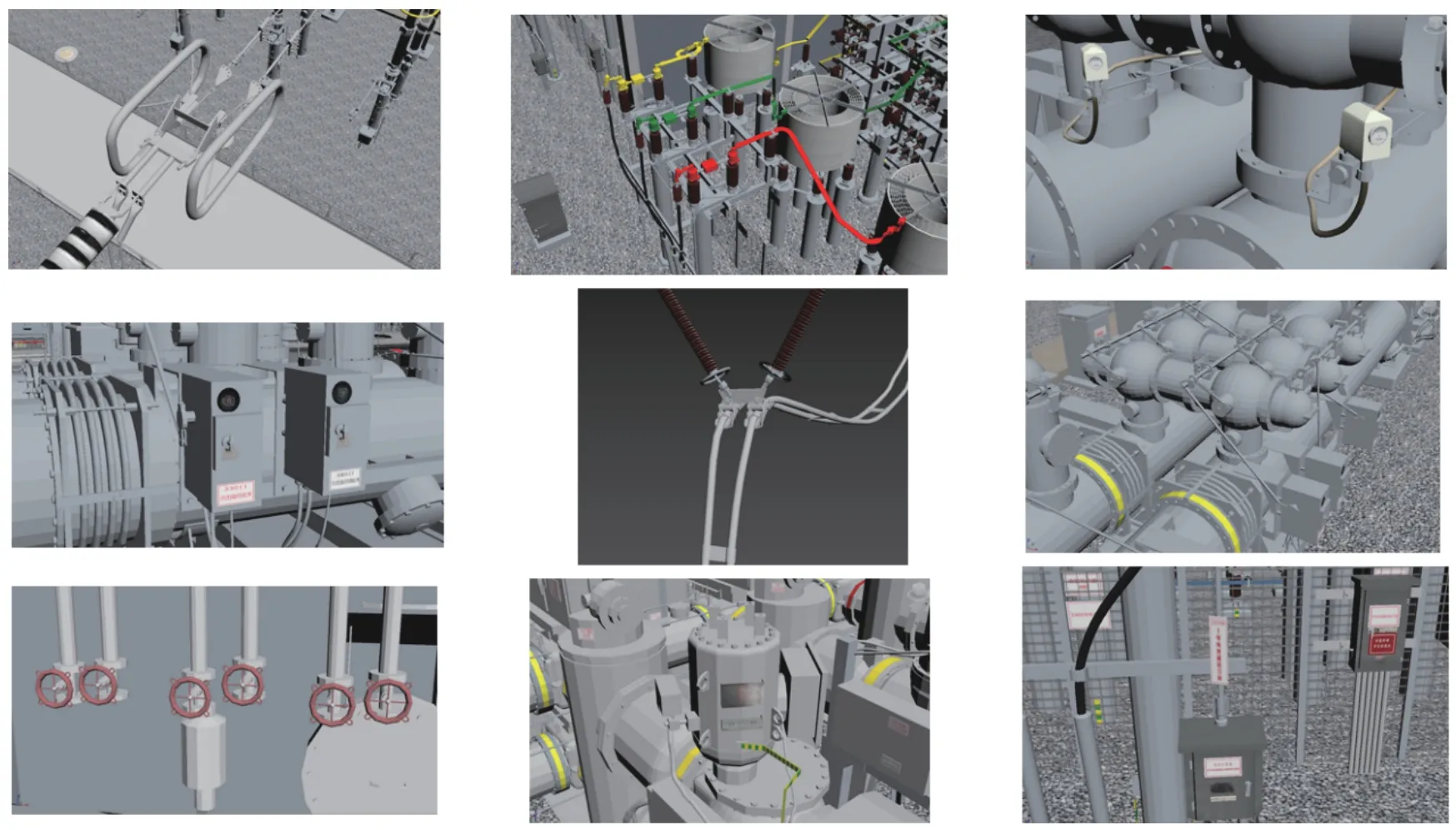
图4 精细模型细节展示
4.1.3 贴图及材质渲染
由于拍摄角度和拍摄环境的影响,现场采集到的一些纹理图像会出现一些情况,如变形、透视、过度曝光、曝光不足、阴影等。为制作纹理,对于光线不足、阴影范围大的区域尽量删除。有倾斜变形的图像通过透视裁剪进行修正,对有污渍的地方裁剪其他干净表面纹理进行叠加从而达到美化的效果,如图5 所示。

图5 现场铭牌纹理制作贴图
为减小内存,纹理图像的提取和制作中,考虑到模型的灯光效果,应在纹理图案的制作中加入高光与阴影效果。制作光滑表面或有弧度的复杂构件时,可通过贴图的视觉效果实现。例如绝缘子的构建可根据现场实物,制作有明暗间隔的条纹贴图实现。根据现场点云组合模型后,依据一次接线图连接设备,根据PMS 台账打包设备单元。
4.1.4 整合模型并编码
单一模型制作完成后,将同一设备的多个部件通过附加的方式整合成为一个整体。根据规范,更改整体模型的名称为设备编码与PMS 台账编码。
根据现场点云摆放组合模型后,依据一次接线图连接设备,根据PMS 台账打包设备单元。
4.1.5 模型导出
将整合完成的模型导出为单一模型放入数据库,以便于后期制直接调用。
4.2 基本模型库建立
对于区域内相同的设备建立标准模型,实现可复用可调用,随时接入,方便后续变电站建设与改造。
再次导入标准模型可直接导入合并。
实际生产过程中,设备在安装和运行后都会有一定的误差与变化。标准模型在导入后仍须根据现场情况做调整。
4.3 模型应用
目前的变电站正在推广的无人巡检模式,通过搭载激光扫描设备,定期巡检变电站。无人机在巡检过程中与数据库精细化模型对比,可及时发现异常点,及时上报。
5 结束语
三维激光扫描技术的应用在变电站系统中实现了逆向设计,还原了真实的变电站运维场景,保证了建模质量,使其具备了为智慧变电站等智能化运维管理系统提供现实场景数据的作用,进一步推进了基于变电站可视化技术的故障检测,应急处理等深化服务功能,为后台管理人员提供了及时有效地设备运检信息,提升了运维人员的设备管控能力,全面推动了变电站无人巡检工作模式的发展,实现了技术创新驱动业务发展[12]。
猜你喜欢
软件(2020年3期)2020-04-20
摄影之友(影像视觉)(2018年12期)2019-01-28
电子制作(2018年8期)2018-06-26
测绘工程(2018年3期)2018-03-20
Coco薇(2017年8期)2017-08-03
电子制作(2017年8期)2017-06-05
现代工业经济和信息化(2016年5期)2016-05-17
Coco薇(2015年5期)2016-03-29
河南电力(2015年5期)2015-06-08
测绘学报(2015年4期)2015-01-14
