基于S7-200 SMART 的热力管道在线堵漏机器人控制系统设计
2023-03-27 06:34焦建俊武文斌刘晓貌
科技创新与应用 2023年8期
焦建俊,李 通,武文斌,刘晓貌,李 冰
(1.大唐保定供热有限责任公司,河北 保定 071000;2.华北电力大学 自动化系,河北 保定 071000)
受国家环保、民生等宏观政策的影响,近年来集中供热行业快速发展,热力企业供热规模不断扩大,整体供热负荷持续增加,供热管网愈加复杂,大型供热管网或超大型供热管网正在日趋形成[1]。随着管网运行年限的增加,管网运行环境复杂多变,各种管网泄漏事故日益增多,如焊缝开裂、管道腐蚀泄漏及阀门破损等。在造成经济损失的同时,更是对民生供热稳定构成较大威胁,管网尤其是一次主管网的安全可靠成为不容忽视的问题[2-4]。在热力管道运维过程中,热力管道的泄漏点封堵是热力管道维护中非常关键的问题,目前全部采用人工加装密封夹具方式进行堵漏处理,工作环境恶劣,人身危害较大[5]。热力管道的人工堵漏作业方式如图1 所示。

图1 热力管道的人工堵漏作业
为了提升抢险效率、减少现场泄漏造成的人身伤害,设计了专门用于夹具安装的在线堵漏机器人代替人工完成堵漏工作。通过利用可编程逻辑控制器(PLC)作为主控制器,以在线堵漏机器人控制过程为研究对象,设计了在线堵漏机器人的控制系统,作业技术人员通过遥控装置控制履带式底盘将机器人移动到待维修漏点附近,将夹具固定在机械臂末端,通过遥控装置将夹具安装在漏点管道上,抑制漏点高压高温热水喷射,后续人工进行紧固,实现对漏点的维修。
1 在线堵漏机器人总体分析
1.1 在线堵漏机器人整体框架
以在线堵漏机器人为研究对象,其整体结构如图2 所示。通过对一台小型挖掘机进行改造,设计了专门用于夹具夹紧的机械臂末端执行机构,实现对夹具的夹紧操作。在线堵漏检修机器人的底盘采用履带式结构,将堵漏夹紧末端通过机械臂安装在底盘上。在线堵漏机器人控制主要包括行走控制、回转控制、机械臂操控、夹紧末端控制和电气控制系统等。其中机械臂控制主要包括大臂控制、小臂控制、末端垂直偏转控制、末端水平偏转控制及夹具夹紧控制,采用液压方式实现上述控制的动作[6-7]。大臂控制和小臂控制主要用于对夹紧末端位置进行粗调,末端垂直偏转与水平偏转用于对夹紧末端位置进行细调。夹紧装置一端夹具固定,另一端夹具采用液压推杆方式实现夹具在堵漏过程中的夹紧操作。

图2 在线堵漏机器人整体结构
1.2 在线堵漏机器人功能需求与指标
在线堵漏机器人主要用于热力管道在发生泄漏时通过技术人员远程操控,实现带压堵漏,其主要功能需求为:①能够适应现场恶劣环境;②能够实现对管径100~400 mm 的管道进行堵漏;③能够对管道压力为10 MPa 时进行堵漏;④末端可以在水平180°范围内回转,在垂直180°范围内转动;⑤爬坡角度最大为35°。除以上功能需求外,在线堵漏机器人还具备液压系统监控、实时在线视频监控当前漏点状况等功能。
1.3 在线堵漏机器人控制系统整体方案
在线堵漏机器人主要包括机械控制、液压控制和电气控制等系统组成,在堵漏过程中需要三部分协作完成。本文主要针对在线堵漏机器人的电气控制部分进行分析研究和设计,根据在线堵漏机器人的结构特性和作业要求,电气控制系统的结构如图3 所示[8]。

图3 在线堵漏机器人电气控制系统结构
进行热力管道在线堵漏维修时,在线堵漏机器人进行作业的工作流程如下:
1)首先将堵漏夹具安装在夹紧末端,并通过夹紧末端控制夹具,使其处于张开状态。
2)作业人员通过底盘遥控装置控制履带式底盘将机器人移动到待维修漏点附近。
3)通过机械臂遥控装置调整大臂、小臂、末端垂直及水平偏转位置,调整固定在机械臂夹紧末端的位姿。
4)在夹紧装置位姿调整到位后,控制夹紧装置将夹具夹在管道漏点位置,抑制漏点高温高压热水的无序喷射。
5)夹具在漏点位置夹紧后,由作业人员通过螺栓对夹具进行紧固并注入耐高温专用密封剂,实现对管道漏点的在线堵漏维修。
2 在线堵漏机器人电气控制系统硬件设计
在线堵漏机器人控制系统采用PLC 作为核心控制部件,为了降低人员操作可能存在的人身伤害,采用遥控方式实现在线堵漏操作。技术人员通过远程遥控实现对在线堵漏机器人的控制操作,其控制主要包括大臂升降、小臂升降、末端垂直收放、末端水平摆偏和夹具夹紧松开控制等,控制信号通过遥控接收器接收遥控信号,实现对机器人堵漏时的实时控制。根据控制要求,PLC 控制系统需要14 个输入点和12 个输出点。本文采用西门子公司的S7-200 SMART ST60 作为控制器,ST60 具有36 个输入点和24 个输出点[8-9],能够满足系统控制需要,输入/输出点配置见表1。
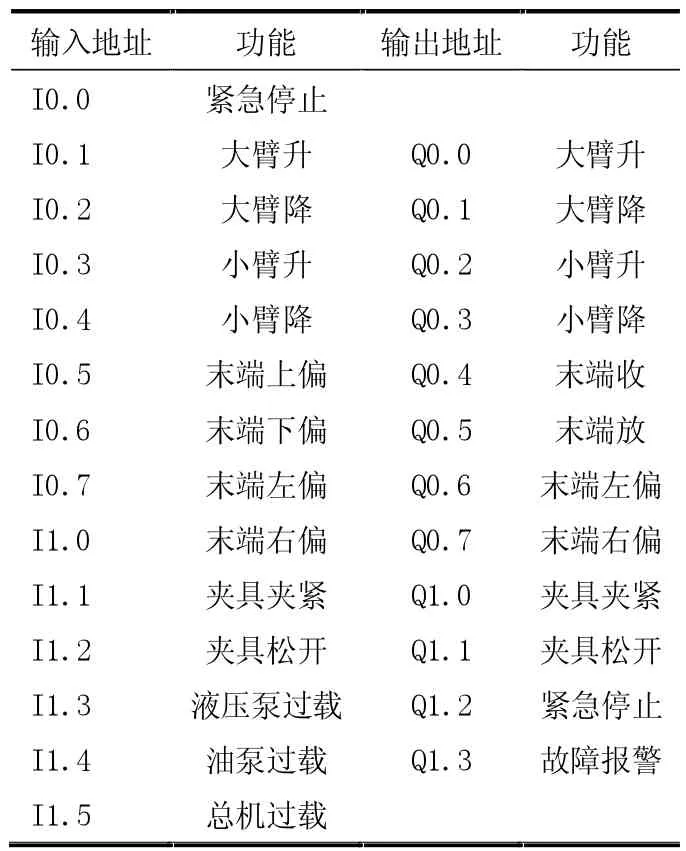
表1 PLC 控制模块输入输出配置表
数字量输入接口主要用于接收遥控器端发来的机械臂位姿调整及夹紧末端实现夹紧操作等开关控制信号的输入及液压系统过载保护输入;数字量输出用于实现机械臂各部件液压比例阀、换向阀控制信号的输出。
人工操作遥控端采用欧姆(重庆)电子技术有限公司TCS-32-L 型发射器,该遥控发射器采用双摇杆设计,使用寿命可达100 万次;实时主动控制符合欧盟标准;高达64 组数字IO 输入及10 组比例量输入;自动频率控制,开机时自动选择适当信道。接收器数字输出端与相应控制功能的PLC 数字输入端连接,实现对在线堵漏时的实时控制操作。
3 在线堵漏机器人电气控制系统软件设计
在线堵漏机器人在进行堵漏时位置调整、末端夹具姿态调整及夹具的夹紧等控制均由PLC 控制程序实现,控制程序采用IEC 1131-3 标准进行编制。
3.1 堵漏机器人控制流程设计
由于热力管道大部分埋在地下,当热力管道出现泄漏时,在漏点附近开挖出作业面,漏点位置所处环境一般都比较复杂,且作业人员采用远程遥控方式对机器人进行操控。为了保证堵漏机器人在进行堵漏作业时的安全性,需要对堵漏机器人的动作流程进行限定。
1)堵漏机器人履带底盘在移动过程中,机械臂不得进行动作操作,以免与周围围挡等发生碰撞(底盘操控与机械臂操控分别采用不同遥控器,此处由作业人员人工协调)。
2)堵漏机器人底盘移动到位后,可以对机械臂操作,进行末端夹紧装置的位姿调整。
3)在机械臂位姿调整时,大臂、小臂的动作可以同时进行,但此时夹紧末端垂直偏转、水平偏转动作不能进行。
4)在大臂和小臂控制到位后,通过调整夹紧末端垂直偏转及水平偏转对夹具末端位姿进行精准调整,大臂、小臂控制不能有动作。
5)夹具位姿调整到位后,控制夹紧装置将夹具夹在管道漏点处。夹具夹紧及松开操作时,大臂、小臂、垂直偏转、水平偏转均不能有动作。
6)当出现过载时,所有动作立即停止,待过载问题排除后,方可继续进行操作。
3.2 控制系统程序设计
根据堵漏机器人控制流程,采用梯形图方式对控制程序进行设计。部分控制功能梯形图如图4 所示。
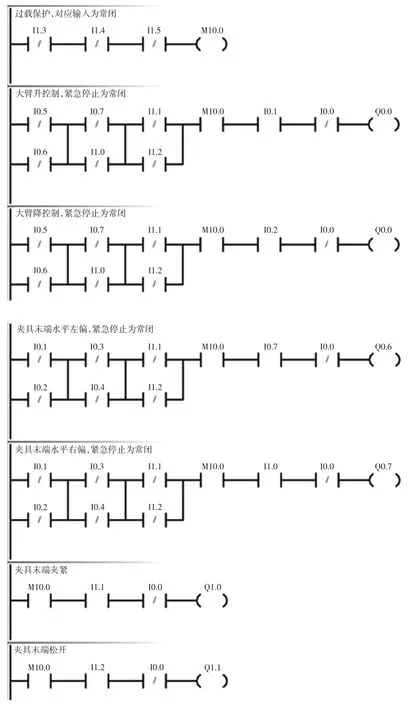
图4 堵漏机器人PLC 梯形图程序
4 实验结果与分析
为了验证在线堵漏机器人电气控制系统的可行性和适用性,系统设计完成后在河北联润在线工程技术有限公司搭建了实验平台,并进行了实际的堵漏作业操作。在线堵漏实验的过程及结果如图5 所示。

图5 在线堵漏实验
首先将根据待堵漏管道粗细预先制作对应尺寸大小夹具,夹具分为上下两部分,分别安装在夹紧前端的上下固定位置,图5 中机械臂前端弧形装置即为夹具。实验过程中,通过遥控器将夹具分开,分开距离大于待维修管道外径,以保证夹具能够在管道安装。现场工作人员通过遥控器将机器人履带底盘移动至合适位置,通过控制机械臂大臂、小臂将夹紧末端夹具调整到管道外围,并调整水平偏转及垂直偏转控制实现夹具位置细调,保证夹具与管道平行。操作夹具夹紧末端推动夹具闭合,将上下两部分夹具紧紧夹在管道外壁,由人工进行螺栓紧固,实现在线堵漏操作。
通过对在线堵漏机器人现场实验测试,结果表明,所设计的堵漏机器人控制系统能够实现机械臂、夹紧末端进行堵漏作业的远程遥控控制,操作方便、易用性强,在线堵漏实验效果良好。
5 结束语
针对热力管道发生泄漏故障,设计了在线堵漏机器人及基于PLC 的机械臂电气控制系统。系统对堵漏机器人的总体结构进行了分析,并进行了控制系统的软硬件设计。实验结果表明,在线堵漏机器人能够有效进行热力管道堵漏作业,大大降低了热力管道出现泄漏时人工堵漏作业隐含人身伤害风险,具有较强的实用性和推广价值,对供水管道泄漏、电厂蒸汽管道泄漏等也具有一定的借鉴意义和应用价值。
猜你喜欢
包装与食品机械(2021年5期)2021-11-06
环境技术(2021年4期)2021-09-11
航空维修与工程(2020年7期)2020-09-18
制造技术与机床(2019年12期)2020-01-06
石油化工建设(2019年4期)2019-10-10
石油钻采工艺(2019年3期)2019-09-25
组合机床与自动化加工技术(2019年5期)2019-05-24
载人航天(2016年4期)2016-12-01
综合智慧能源(2014年1期)2014-09-10
中国工程机械学报(2014年3期)2014-05-25