光伏并网逆变器参数性故障的VMD-WPE和MPA-LSTM诊断方法研究
2023-03-24 11:21:06张彼德余海宁罗荣秋
电力系统及其自动化学报 2023年2期
张彼德,余海宁,罗荣秋,张 锦,冯 京
(西华大学电气与电子信息学院,成都 610039)
随着全球日益严重的环境污染问题,以及化石能源的不断减少和枯竭,太阳能光伏发电作为最具有可持续发展前景的一种可再生能源发电技术,得到国内外的普遍重视。光伏并网逆变器安全、稳定、可靠的运行对于光伏发电系统至关重要[1-2]。
在光伏并网逆变器中,故障主要分为参数性故障与结构性故障。结构性故障通常为电路元件损毁引起系统结构改变,造成电路运行状态严重异常的情况[3],由电路元件开路或短路引起的结构性故障,故障特征较为明显,对其故障诊断研究较多;参数性故障是指电路器件在各种工作应力作用下,发生性能劣化、参数退化从而产生的故障。对参数性故障诊断现有研究较少,且故障特征区分度差,不易进行故障诊断,因此,有必要对光伏并网逆变器参数性故障的诊断进行研究,以解决更实际的生产安全性问题[4]。文献[5]针对飞跨电容型逆变器的参数性故障建立诊断键合图模型,提出全局解析冗余关系的参数性故障诊断方法;文献[6]针对光伏逆变器的参数性故障,利用小波分解提取变分模态分解 VMD(variational modal decomposition)后各模态分量的小波能量作为参数性故障特征量,再利用卷积神经网络CNN(convolutional neural network)实现参数性故障诊断;文献[7]对中性点钳位型3电平光伏逆变器三相线电压进行改进的变分模态分解后,利用小波分解求取模态分量的小波能量,作为参数性故障特征量,再利用支持向量机SVM(support vector machine)实现对其分压电容参数性故障的诊断。目前,逆变器的参数性故障诊断大多针对开环系统,而对闭环系统的相关研究较少。由于闭环系统与开环系统的控制方式区别较大,现有的参数性故障诊断方法难以直接应用,需做进一步研究。
本文针对两级三相光伏并网逆变器直流母线电容的参数性故障,以三相桥臂中间点的线电压为原始数据,采用基于变分模态分解的小波包能量VMD-WPE(variational madal decomposition-wavelet packet energy)特征提取方法,即采用样本熵优化VMD的模态数后,利用小波包分解提取各变分模态分量的小波包能量WPE(wavelet packet energy)作为故障特征向量;利用海洋捕食者算法MPA(marine predators algorithm)对长短期记忆LSTM(long short-term memory)神经网络进行超参数寻优,构成海洋捕食者算法优化长短期记忆MPA-LSTM(marine predators algorithm-long short-term memory)神经网络模型来实现故障的参数性辨识。
1 光伏并网逆变器参数性故障分析
图1为两级式三相光伏并网逆变器拓扑结构及控制策略图。图1中,逆变器采用两级式结构和直流电压外环、网侧电流内环的双闭环控制策略;两级式三相光伏并网逆变器拓扑结构由DC-DC电路和DC-AC逆变电路组成。其中,L、T、D1、Cdc构成前级DC-DC功率变换电路,实现光伏阵列的最大功率点跟踪控制MPPT(maximum power point tracking)[8],同时将光伏阵列输出的电压值转换到后级逆变并网所需要的直流电压值;后级为6个绝缘栅双极型晶体管IGBT(Insulated Gate Bipolar Transistor)构成的三相桥式逆变电路实现并网控制。
在图1光伏并网逆变器的双闭环控制策略中,电压外环控制使直流母线电压udc保持稳定;电流内环控制输出电流,调节输出电网电流使之与电网电压同频同相,从而实现单位功率因数并网。LCL滤波器对谐波的衰减具有更好的抑制作用,最后经过L1、L2和C1组成的LCL滤波器滤波后并网。
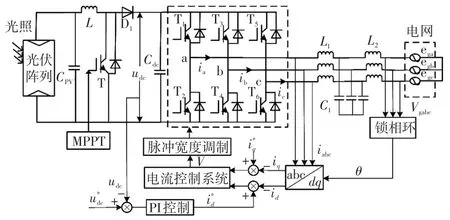
图1 两级式三相光伏并网逆变器拓扑结构及控制策略Fig.1 Topology of two-stage three-phase photovoltaic grid-connected inverter and its control strategy
光伏并网逆变器直流母线电容Cdc目前多采用容量较大的铝电解电容,直流母线电容吸收由逆变器在高频工作模式下产生的大量高次谐波电流,起到稳定直流母线侧电压和对逆变器升压后进行储能的作用,从而实现向电网输送稳定、干净电能的目的。
图2为电容C和等效串联电阻ESR(equivalent series resistance)所构成的直流母线电容Cdc的等效模型。光伏并网逆变器系统作为强非线性系统,元器件长时间处于高频模式运行,使电容的ESR增大、电容值C减小,造成直流母线电容加速老化、性能急剧退化,最终导致电路出现参数性故障,造成装置的损坏甚至系统的崩溃。

图2 电解电容等效模型Fig.2 Equivalent model of electrolytic capacitor
通常以ESR增大为初始值的2~3倍或者电容值C减小到初始值的80%作为电解电容的失效判据[9]。光伏并网逆变器直流母线处电容的ESR值较小,且易受电路的工作情况影响,检测精度不高,因此本文以电容值减小到初始值的80%作为光伏并网逆变器直流母线电容发生参数性故障的判据。
2 VMD-WPE故障特征提取方法
故障特征提取方法是实现光伏并网逆变器参数性故障诊断的核心环节。直流母线电容在不同老化程度下的光伏并网逆变器电路状态区别甚微,因此对故障特征量的提取较为困难。VMD可有效避免在处理参数性故障信号时所产生的模态混叠,具有较好的复杂数据分析精度的优点。小波包变换用于故障特征提取综合了时域和频域分析两种方法,是一种精细的信号分解方法,利用小波包变换提取WPE能够表征信号的故障特征,其特征提取结果可信度高,抗干扰性强。以光伏并网逆变器三相桥臂中点间的线电压Uab、Ubc、Uca为测量点,该测量点数据不受其他相故障的影响,减少了特征提取中冗余的干扰数据。故对光伏并网逆变器三相线电压信号进行优化VMD后,提取各模态分量的WPE作为参数性故障特征量。
2.1 VMD分解信号
VMD通过迭代搜寻变分模型的最优解匹配各模态分量的最佳中心频率和有效带宽,进而实现给定信号的有效分离[10]。其方法的整体思想是构造和求解变分问题。
假设有一原始信号被分解为K个本征模态分量,为使分量为具有中心频率的有限带宽,同时满足各模态分量的估计带宽之和最小,约束条件为所有模态分量之和与原始信号相等,则相应的约束条件可表示为
式中:f(t)为当前时刻t的原始信号;j为虚数单位;δ(t)为单位冲击函数;∂t为 δ(t)的偏导;{uk}、{ωk}分别为分解后第k个模态分量和中心频率;uk(t)为当前时刻得到的第k个模态分量。
为将式(1)转变为非约束性变分问题,则需引入增广Lagrange函数,其表达式为
式中:α为惩罚因子;λ为Lagrange因子。
通过采用乘子交替方向法结合Parseval/Plancherel、傅里叶等距变换来求解式(2),并寻求其表达式的“鞍点”,最终模态分量和中心频率可表示为
VMD具有较好复杂数据分解精度的优点,但需要提前设置模态函数个数K、惩罚因子α和噪声容忍度τ。模态个数K的确定对分解效果影响极大,K过小不易获得足够的故障信息;K过大会导致过分解且增大计算量,因此提出基于样本熵SE(sample entropy)原理的K值确定法。
SE是优于近似熵的一种通过非负数来度量时间序列复杂度的方法。故障检测信号经VMD后的序列,其自我相似性越高,则含有越多的故障特征信息,对应的SE值越小。选用光伏并网逆变器三相线电压Uab、Ubc、Uca进行VMD,计算不同模态数下各模态分量的SE,并对SE求取均值,SE具体计算方法见文献[11]。SE均值Sm可表示为
式中,gi为第i个模态分量的SE。
在不同K值下求得的最小SE均值所对应的K值即为VMD的最优模态数。
2.2 WPE提取
小波包变换[12]是比小波变换更加精细的一种信号分析方法,在每一级信号分解时,除了对低频信号进行再分解,同时也对高频信号进行再分解,实现信号分辨率的提高。经过小波包分解后,信号不同参数性故障程度所对应的频段能量不同,因此经小波包分解后各节点的WPE可构成参数性故障特征向量,其表达式为
式中,Ep,k为各频带的WPE值,k=0,1,…,2p-1,p为小波包分解层数,。
2.3 VMD-WPE特征提取步骤
由第2.1和2.2节所述原理分析,可利用基于VMD-WPE特征提取方法对三相光伏并网逆变器的参数性故障进行特征提取,其具体步骤如下:
步骤1以最小SE为准则确定VMD模态分解数K;
步骤2对光伏并网逆变器三相线电压信号Uab、Ubc、Uca进行VMD,获得模态分量;
步骤3利用小波包变换求取各模态分量的WPE;
步骤4对所求的WPE构建参数性故障特征向量。
3 MPA-LSTM参数辨识方法
LSTM是循环神经网络的改进网络,能对长期依赖信息进行学习,非常适合处理与时间序列高度相关的数据,对复杂时间序列数据的辨识和预测有优良的效果,可用来解决光伏并网逆变器参数性故障诊断辨识精度不够的问题[13-14]。然而LSTM的参数辨识效果受其隐含层节点、训练次数等关键参数设置的影响。因此,采用MPA对LSTM关键参数进行寻优,建立MPA-LSTM神经网络模型。
3.1 海洋捕食者算法
MPA是由Faramarzi等[15]在2020年提出的一种新型受自然启发的优化算法,即在海洋系统中捕食者选择最佳觅食的策略。MPA优化过程步骤如下。
步骤1初始化阶段。MPA首先在设定的搜索空间范围内随机初始化猎物位置,其初始化表达式为
式中:Xmax、Xmin为设定的搜索空间上、下范围;rand()为[0,1]内均匀随机数。
步骤2MPA优化阶段。在迭代初期,当捕食者移动速度比猎物速度快时,此时基于勘探阶段的表达式为
式中:Ia、Ma分别为当前和最大迭代次数;si为移动步长;RB为呈正态分布的布朗游走随机向量;Ei为由顶级捕食者构造的精英矩阵;Pi为与Ei具有相同维数的猎物矩阵;⊗为逐项乘法运算符;p等于0.5;R为[0,1]内均匀随机向量;n为种群的数量。
步骤3迭代中期,捕食者与猎物以相同速度移动,猎物基于Lévy游走策略进行开发;捕食者基于布朗游走策略负责勘探。开发和勘探的表达式为
式中:RL为呈Lévy分布的随机向量;CF为步长的自适应参数。
步骤4在迭代终期,捕食者使用Lévy游走策略,其移动速度慢于猎物速度,此阶段表达式为
步骤5解决涡流形成和鱼类聚集装置效应。MPA优化过程考虑了鱼类聚集装置和涡流效应对捕食者觅食行为的影响,以逃离局部极值问题。其表达式为
式中:FADs为鱼类聚集装置效应系数,取0.2;U为二进制向量;r为0~1的随机数;Pr1、Pr2分别为猎物矩阵随机索引r1、r2所对应的个体矩阵。
3.2 LSTM神经网络
LSTM由Hochreiter等[16]在1997年提出,其结构如图3所示,它包含3个门控单元,即遗忘门、输入门和输出门[17],LSTM具体的工作原理如下。

图3 LSTM结构Fig.3 LSTM structure
1)遗忘
遗忘门接收前一单元的输出ht-1和当前单元的输入xt,当前时刻遗忘门输出值ft可表示为
式中:σ为sigmoid激活函数;Wxf、Whf分别为输入项xt、ht-1的遗忘门权重矩阵;bf为偏置项。
2)存储
输入门用于产生新的记忆,并将新记忆进行存储添加到历史记忆中。存储的信息由输入门输出it和当前细胞状态ĉt决定,其计算式可表示为
式中:Wxi、Whi分别为xt、ht-1的输入权重矩阵;bi为输入偏置项;Wxc、Whc分别为xt、ht-1状态的权重矩阵;bc为状态偏置项。
3)更新
设定ct为当前单元状态在t时刻循环单元选择记忆的信息,其可表示为更新时遗忘t-1时刻的单元状态ct-1加上当前时刻的输入信息,即
4)输出
根据当前细胞状态计算需要输出的信息ht,其计算公式可表示为
式中:Wxo、Who分别为xt、ht-1的输出权重矩阵;bo为输出偏置项;ot为输出门的输出;ht为经过激活函数tanh运算后当前时刻的输出。
3.3 MPA-LSTM模型建立及实现步骤
MPA-LSTM模型的建立及具体实现步骤如下。
步骤1初始化。设置MPA算法最大迭代次数、种群数量n、鱼类聚集装置效应系数、常量P,令当前迭代次数为0,初始化猎物位置。
步骤2选择寻优对象和确定适应度函数。将LSTM里的批量大小Batchsize、2个隐含层的节点数、训练次数和学习率作为寻优对象,选用训练样本的均方误差作为适应度函数,即
式中:B为批量大小;L1、L2为2个隐含层的节点数;Tt为当前时刻训练次数;IL为学习率;Nt为当前时刻训练样本数;Ŷi为第i个训练样本的实际值;Yi为第i个训练样本的预测值。
步骤3迭代更新。根据MPA不同迭代阶段更新捕食者位置。
步骤4判断终止条件。判断当前迭代次数是否已达最大迭代次数,若是,则输出最佳精英矩阵。
步骤5输出最佳精英矩阵,即LSTM寻优的最佳网络超参数,将寻优得到的超参数带入LSTM模型中,构成MPA-LSTM模型。
4 故障诊断流程
本文提出VMD-WPE和MPA-LSTM的故障诊断方法用于三相光伏并网逆变器的参数性故障诊断,对其直流母线电容进行参数辨识,其故障诊断流程如图4所示。参数性故障诊断分为离线训练和在线辨识,具体步骤如下。
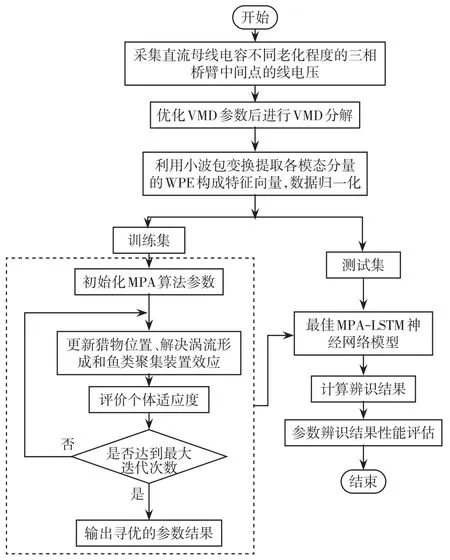
图4 参数性故障诊断流程Fig.4 Flow chart of parametric fault diagnosis
(1)离线训练。
步骤1数据采集。在光伏并网逆变器三相线电压处,采集多组直流母线电容在不同老化程度下所对应的线电压数据,经基于VMD-WPE进行故障特征提取并构建特征向量,对故障特征向量进行预处理作为训练样本集。
步骤2根据要求构建MPA-LSTM模型。以最小化LSTM网络的误差为适应度函数,采用MPA优化LSTM网络超参数,保存优化后LSTM网络的所有参数,建立MPA-LSTM模型。
(2)在线辨识。
步骤1数据采集。在逆变器三相桥臂线电压处,采集当前时刻的线电压数据,经基于VMD-WPE进行特征提取后构造特征向量,对其进行预处理作为测试样本集。
步骤2MPA-LSTM测试。将测试样本集输入到训练好的离线MPA-LSTM模型中,MPA-LSTM的输出便是直流母线电容参数的辨识值。
步骤3诊断结果分析。根据辨识出的电容值结果结合电容失效判据,对参数辨识性能进行评估是否发生参数性故障。
5 方法验证
5.1 仿真实验分析
在Matlab/Simulink中搭建如图1所示的三相光伏并网逆变器仿真模型。前级DC/DC升压变换电路采用扰动观测法来实现MPPT控制;后级逆变部分采用电压外环、电流内环的双闭环控制策略。仿真模型中包含的仿真参数如表1所示。

表1 仿真模型参数Tab.1 Parameters of simulation model
直流母线电容标称值为3 300 μF,电容值在10%以内变化属于元件参数在工作状态下的正常波动,设定电容值在0-50%范围之间变化,以模拟不同程度下电容性能退化发生参数性故障的情况;通过仿真采集光伏并网逆变器三相线电压信号Uab、Ubc、Uca,其中,线电压信号采样频率为100 kHz,采样时间为0.1 s。将采集的三相线电压数据按Uab、Ubc、Uca的顺序依次排列作为一组样本数据,通过仿真共采集500组样本数据。
以三相线电压Uab为例,直流母线电容为正常值时线电压波形如图5(a)所示;图5(b)、(c)为直流母线电容处于不同老化阶段时的线电压波形。由图5可以看出,直流母线电容不同老化程度下的线电压波形很相似,因此从电压波形中准确提取表征直流母线电容发生参数性故障的特征量至关重要。

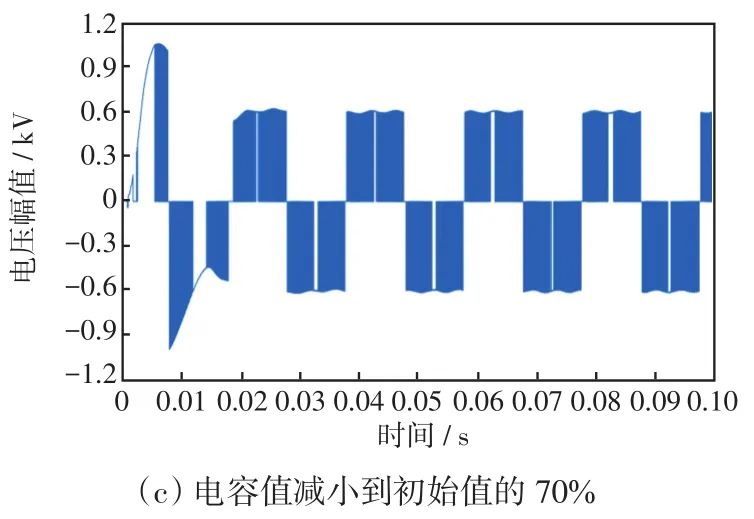
图5 Cdc不同状态时线电压Uab输出电压波形Fig.5 Output voltage waveforms of line voltageUabin different states ofCdc
本文提取三相线电压的VMD-WPE作为参数性故障特征向量,以样本熵为准则确定模态数K,选取最小SE均值对应的K值作为最优模态数。不同K值的SE均值如表2所示,由表2可知,当K=5时所对应的SE均值最小,因此最优模态数K值确定为5。惩罚因子α采用初始默认值2 000;图6为线电压Uab经VMD分解后的IMF分量。

表2 不同K值的SE均值Tab.2 Mean sample entropy for different values of K
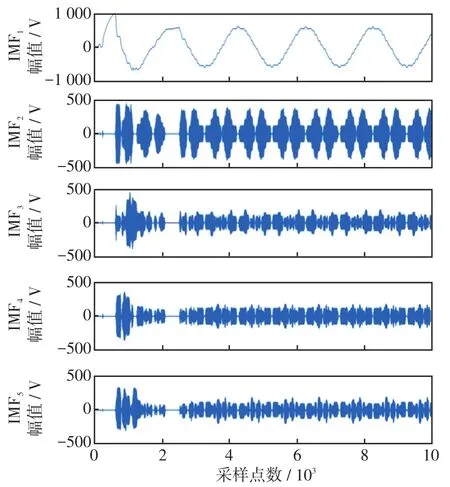
图6 线电压Uab的IMF分量Fig.6 IMF component of line voltageUab
本文采用MPA优化LSTM网络中的关键参数,建立MPA-LSTM模型。优化对象为LSTM网络的批量大小Batchsize、2个隐含层的节点数L1和L2、训练次数T、学习率IL。设置MPA算法最大迭代数Ma=50、种群数量n=20、效应系数FADS=20、常量P=0.5。批量大小Batchsize、2个隐含层的节点数L1和L2、训练次数T、学习率IL取值范围分别为[1,64]、[1,100]、[1,100]、[1,50]、[0.001,0.01]。以LSTM训练样本的均方误差作为适应度函数,使用MPA优化算法寻找一组最优网络参数使样本均方误差最小。由于是最小化样本误差,因此适应度曲线是一条下降并逐渐趋于平缓的曲线,如图7所示。

图7 适应度曲线Fig.7 Fitness curve
5.2 诊断结果及对比分析
为验证本文所提的VMD-WPE和MPA-LSTM参数性故障诊断方法的综合性能,以光伏并网逆变器原始三相线电压信号Uab、Ubc、Uca为故障检测量,设置5种不同的特征提取和参数辨识方法,将特征向量集中的400组样本作为训练集,100组样本作为测试集。基于相同样本数量的训练集和测试集采用不同故障诊断方法对诊断效果进行对比分析,具体方法如下。
方法1WPE+BPNN。采用传统的故障诊断方法;利用小波包基函数为db3的3层小波包分解;反向传播神经网络BPNN(back propagation neural network)网络输入神经元数为12、输出神经元数为1、隐含层神经元数通过寻优后设为10,隐含层和输出层传递函数分别选择S型函数和purelin函数。
方法2VMD-WPE+BPNN。VMD以最小SE为准则确定模态数K为5,惩罚因子α采用初始值2 000,小波包分解参数选取同方法1;BPNN输入神经元数为120、输出神经元数为1、隐含层神经元数通过寻优后设为20,隐含层和输出层传递函数选择同方法1。
方法3VMD-WPE+LSTM。特征提取方法参数设置同方法2;设置LSTM网络输入为120、输出为1、学习率 IL为0.01、batchsize为10、训练次数 T为25、2个隐含层的节点数L1和L2均为20。
方法4VMD小波能量+MPA-LSTM。VMD参数设置同方法2;采用小波基函数为db3的3层小波分解;MPA-LSTM参数设置同本文实验分析部分。
方法5VMD-WPE+MPA-LSTM(本文方法)。
各方法部分测试样本的光伏并网逆变器参数性故障辨识结果如图8所示。

图8 不同方法下的部分测试样本参数辨识结果Fig.8 Parameter identification results of some test samples under different methods
将以上5种方法各运行20次,记录决定系数R2和平均绝对误差MAPE,并对其求取平均值,则整体辨识评价结果如表3所示。

表3 电容值辨识的评价结果Tab.3 Evaluation results of capacitance identification
由表3可知,方法1、2和方法4、5分别采用相同的参数辨识方法、不同的特征提取方法,评价结果表明VMD-WPE的特征提取方法优于WPE、VMD小波能量的特征提取方法;方法3和方法5采用相同的特征提取方法、不同的参数辨识方法,评价结果表明MPA-LSTM的参数辨识方法效果最佳。本文提出的方法R2决定系数最大,平均绝对误差MAPE最小,对直流母线电容的参数辨识效果最佳。以上分析验证了本文所提方法在光伏并网逆变器中对直流母线电容进行参数性故障诊断的有效性。
6 结论
针对光伏并网逆变器参数性故障的特征区分度小,不易诊断等问题,本文提出一种VMD-WPE+MPA-LSTM的参数性故障诊断方法,并通过仿真对其可行性和精确性进行了验证,主要结论如下:
(1)使用基于VMD的小波包分解对故障信号进行特征提取,能够有效避免模态混叠,同时在时频域获取了更细致的参数性故障特征信息;
(2)利用MPA算法对LSTM网络的关键参数进行优化,避免人为经验对参数选取的不当,较大地提高了参数辨识精确度,参数性故障辨识效果均高于使用BPNN模型和单独使用LSTM网络模型。
猜你喜欢
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
电子制作(2018年19期)2018-11-14 02:37:08
自动化学报(2017年11期)2017-04-04 02:52:58
电源技术(2015年12期)2015-08-21 08:58:44
电测与仪表(2015年4期)2015-04-12 00:43:06
电测与仪表(2015年12期)2015-04-09 11:44:44
电测与仪表(2015年5期)2015-04-09 11:30:46
噪声与振动控制(2015年4期)2015-01-01 07:08:21
电测与仪表(2014年14期)2014-04-04 11:53:30
电机与控制应用(2013年9期)2013-11-21 08:00:04