
考虑换挡损失的发动机与AMT多工况高效协同控制
2023-03-18 01:54孙晓鹏李传友刘玉博郑大伟
汽车电器 2023年2期
孙晓鹏, 李传友, 赵 朕, 刘玉博, 郑大伟
(潍柴动力股份有限公司, 山东 潍坊 261061)
传统卡车主要以柴油为燃料,随着化石能源的日益消耗与匮乏,整车厂家对整车燃油经济性越来越重视,国家法规也不断提高对汽车油耗与排放的要求,本文基于某款AMT整车进行协同控制策略的开发及仿真。
挡位决策是AMT的核心技术之一,其优劣性直接影响到整车最优性能的发挥,最佳挡位决策主要受车辆工况参数与车辆行驶状态的影响,对这些影响因素进行估算识别,可以制定适应性强的挡位决策策略。目前基本换挡规律是基于换挡动力中断过程中车速不变的假设完成的,而实际换挡过程中驱动力为0,阻力较大时车速会下降很多,换挡后的发动机转速也会比预期值低很多,使得发动机处于不理想的区域工作[1]。本文通过考虑换挡后的车速损失,决策出最佳换入挡位。
开发的策略如果直接采取实车测试方式,就需要开发多种不同方案的测试车辆,同时进行实车验证,多任务并行,不但要投入大量的人力、物力,而且周期长、成本高。
AMESIM软件是多学科领域复杂系统建模仿真平台,为机械、车辆、控制等工程系统提供了一个较完整的综合仿真环境。但是它的控制系统仿真功能模块相对较少,不具备神经网络、模糊控制等工具箱。因此本文采用SIMULINK和AMESIM的联合仿真技术,可以充分发挥二者的长处,建立准确快捷的仿真模型。
1 控制策略开发
1.1 整车行驶阻力模型
发动机为整车提供动力源,经干式离合器、AMT变速器、后桥等将动力传递到车轮,车轮驱动力克服行驶阻力,驱动整车行驶。车辆行驶阻力为:
式中:FRes——行驶阻力之和;FRol——滚动阻力;FGrv——坡道阻力;FAir——空气阻力。计算公式如下[2]:
式中:M——车重;g——重力加速度;Ccof——滚阻系数;α——坡度;Cd——空气阻力系数;ρ——空气密度;A——迎风面积;v——车速。
1.2 根据卡尔曼滤波求解整车加速度
将实际车速和加速度传感器采集的纵向加速度作为输入量,经卡尔曼滤波后得到预估车速,预估车速求导得到整车加速度。
卡尔曼滤波以状态估计值的均方误差最小为最优估计,基于带有高斯白噪声的状态空间模型,采取前一时刻的估计量与当前时刻的观测量更新对状态变量的估计,求取当前时刻的估计量[3]。
系统状态方程为:
式中:xk——卡尔曼滤波的预估车速;uk——传感器采集的纵向加速度;Wk——系统过程激励噪声;k——表示第k时刻。
量测方程为:
式中:zk——车速测量值;Vk——测量噪声。
给定车速估计值的初值和估计误差方差的初值后,通过时间更新方程与测量更新方程的不断循环迭代,即可求得预估车速,预估车速求导即得到整车加速度a。
1.3 道路弯度计算模型
根据左右车轮速度差与单轮最大速度比值超过阈值,判断整车是否在弯道行驶。
式中:v左——左轮速度;v右——右轮速度;Jth——阈值。
当整车在弯道行驶,则可根据左轮和右轮速差,计算道路弯度。设:
则可得角速度为:
道路弯度半径r为:
最后可根据弧长与曲率公式,求得整车弯度[4]:
式中:ω——整车角速度;r——道路弯度半径;Lwidth——整车宽度;L——整车长度;θ——道路弯度。根据道路弯度、车重,可得整车弯道阻力;如判断整车未在弯道行驶,则整车弯道阻力为0。
1.4 考虑换挡损失的挡位决策
整车制动时,整车加速度即为损失加速度;非制动工况下,可根据整车行驶阻力、弯道阻力、车重计算损失加速度:
式中:Fcrv——整车弯道阻力。
换挡车速损失为:
式中:t——换挡时间;Vloss——换挡车速损失。
根据下列公式计算出输出轴转速损失:
式中:nloss——输出轴转速损失;RRat——主减速器速比。
根据输出轴实际转速和转速损失,可计算换挡后输出轴转速,再根据变速器各挡位速比,计算换挡后输入轴转速:
式中:nin——换挡后输入轴转速;nout——输出轴转速;Rgear——变速器速比。
通过查发动机外特性曲线,可求得发动机最大扭矩,并根据下列公式求得换挡后最大牵引力:
式中:T——发动机最大扭矩;F——换挡后最大牵引力。根据动力学方程,换挡后挡位需满足下列条件[1]:
在满足式(18)所示条件的同时使得不等式两边偏差最小,求得换入最佳挡位。
2 整车建模与验证
本文基于某款AMT车型进行优化策略验证,利用AMESIM和SIMULINK联合仿真软件[5]进行控制策略、算法逻辑和整车仿真模型的搭建,整车配置参数见表1。

表1 整车配置表
由于搭建整车行驶阻力模型需要用到滚阻系数、空气阻力系数等参数,这些参数在实际工况中很难直接获取。本文依据GB_T 12536—2017汽车滑行试验方法进行整车滑行实验,得到的车辆滑行系数如表2所示。

表2 整车滑行阻力系数
将滑行系数与汽车旋转质量换算系数、迎风面积等参数结合可以算出滚阻系数和空气阻力系数。
发动机万有特性数据如图1所示。

图1 发动机万有特性
2.1 模型搭建
基于SIMULINK进行算法开发、逻辑搭建等工作,最终搭建完成的协同控制策略模型如图2所示,其中包括行驶阻力计算、道路弯度计算、挡位决策等模块,最终输出决策的最佳挡位。

图2 控制策略SIMULINK模型
基于AMESIM软件建立AMT整车物理模型,根据整车构造加载发动机、变速器、后桥、整车、驾驶员模型和动力学模型,并输入整车基本参数,在模型中嵌入开发的SIMULINK逻辑控制模块,通过决策的最佳挡位控制整车模型的换挡动作,最终集成的整车模型如图3所示。

图3 整车模型
2.2 仿真结果
根据GB/T 27840—2011重型商用车燃油消耗量测量办法,以发动机试验为基础,采用由市区郊区和高速组成的C-WTVC循环工况,通过计算机模拟整车在循环工况下的运行来确定车辆燃油消耗量,最终循环工况数据如表3所示,分别统计了市区、公路和高速三类不同的道路工况,其中平均车速,最大加速度等参数差异明显,对比性强。
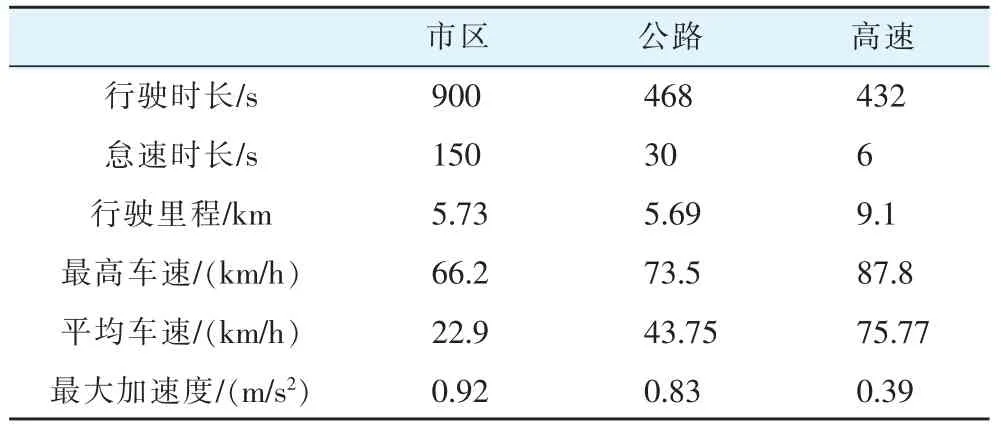
表3 C-WTVC循环工况
通过以上参数可以估计出策略优化前后的油耗量对比,计算结果见表4。

表4 优化前后油耗对比
协同优化策略在市区、公路和高速的节油率分别为:7.1%、5%和0.8%,总体来说节油效果明显。
3 结论
本文开发的控制策略可有效提高整车工况的燃油经济性,提升产品性能。该方法开发周期短、效率高,可快速实现控制策略的开发,并通过搭建整车物理模型对多种方案进行快速仿真验证,规避了现场试验随机性大、周期长的缺陷。
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
西安航空学院学报(2020年5期)2020-12-08
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
北京航空航天大学学报(2017年8期)2017-12-20
汽车维修技师(2017年6期)2017-11-18
作文周刊·小学一年级版(2017年27期)2017-08-10
试题与研究·中考物理(2014年3期)2015-05-11
汽车维修与保养(2015年2期)2015-04-17
汽车维护与修理(2015年5期)2015-02-28
