
浅谈平台供应船DP模式靠泊海上设施
2023-03-10 09:41郑木全交通运输部广州打捞局
珠江水运 2023年4期
◎ 郑木全 交通运输部广州打捞局
石油天然气是世界经济命脉,但是百分之七十油气资源都蕴藏在深海。近年来我国海洋石油的勘探开发向深海进军,这对海上平台支持船来说是新的挑战和机遇。在水更深、海况更复杂的情况下,如何安全靠泊海上设施,这对船长的船艺、船长对船舶靠泊设备(动力定位系统)的操作都提出了更高的要求。
1.船舶靠泊安全的重要性
安全是企业立身之本,只有通过严格的管理,落实各项作业的规范操作,夯实安全生产的基础才能更好地实现人、机、环境的和谐统一。掌握不同作业的风险要素,做好风险分析,将隐患消除在萌芽之中。
对于平台供应船来说,靠泊海上设施作业是一项风险性极高的作业。近年来发生了多起海上平台支持船舶碰撞海上设施的事故,造成了财产损失和恶劣影响,甚至还造成人命伤亡。通过对多起事故分析,人员操作不当是船舶险情事故发生的主要原因,如何深刻吸取事故教训,提升船舶操控能力,是船舶安全靠泊必须思考与解决的问题。船长、驾驶员和DPO应认真学习和理解《船舶靠泊海上设施作业规范》相关规定内容,熟悉船舶的性能,掌握船舶的操控技能。对于笔者所在的DP2动力定位船舶来说,为实现船舶精度可靠、性能稳定的船舶定点作业和预设条件船舶航行能力,根据船舶作业海域的环境,如何设置DP系统匹配的定位精度、增益、加速度、速度、转向速率、船舶吃水等参数,运用DP系统的智能化和高精化实现船舶安全靠泊,满足不同作业的需求,是船长以及DPO一直研究与学习的专题。
2.船舶动力定位系统
伴随开发海上石油天然气走向深海,DP(动力定位系统)已成为不可或缺的重要设备,也是油田支持船发展的一大趋势。船舶动力定位(DP,Dynamically Positioned)是指船舶能够自动通过使用推进器的动力以及单个或者多个位置参照设备来保持船舶的艏向和船位。
3.PSV靠离海上设施的操作
在靠泊平台作业中,船长提前掌握作业海域的风、流等外部环境,选择合适的靠泊船艏向和船位,合理运用好动力定位系统的辅助,全面了解船舶的DP系统以及DP控制台的操作,遵循结构化的“熟悉”程序,阅读相关手册、DP 事故报告、FMEA、DP操作手册以及与DP相关的所有历史记录文件,熟悉在DP模式下已确定的最严重故障,遵守最安全操作模式(SMO)和特定活动操作指南(ASOG),制定DP操作的计划,进行作业风险评估,才能在合理范围内确保安全的DP操作。除此之外,船长和DPO应提前考虑异常操作及紧急情况,分析并熟悉评估异常操作的风险和后果,船长还得具备手操控制船舶的能力,一旦DP系统出现严重状况,可以应急转化为手操模式控制船舶。
3.1 了解新型PSV的操纵性能及DP应用(以德恒轮为例)
(1)新型PSV以电推船为主流,一般主推器配备全回转推进器,手动操纵和一般拖轮有很大区别,主要有三点:①两个全回转吊舱手动操纵相对复杂,而且不能直接从进车直接到倒车,必须降低转速,然后旋转主推,从进车位置到倒车位置有一定的时间差。高速航行遇紧急情况需要迅速减速需缓慢减小转速,转速减小到50%以下再采取小角度(如20-30度)对推,待船速降低到合适范围(如之前航速的一半以下)再将推进器倒转进行倒车。②四个推进器全部是固定螺距桨通过变频调转速,操纵特点和普通拖轮的CPP有很大不同;③PSV一般吨位和尺度偏大(本船船长93.8米、船宽20米、设计吃水8米),船舶惯性较大,受风面积也较大,靠平台操纵时抗浪性较好但首摇严重。要想适应这种操纵方式,就要对本船的推进器布局很了解,熟练推进器的推力方向和大小,熟悉其惯性,就能很好的操纵船舶,即使在DP模式下也能更精准的操纵。
(2)DP2船舶可以分成三种操作:手操模式、独立操作杠模式、主DP模式。独立操作杠系统是主DP控制系统的补充,当主DP控制系统出现问题可以转换为独立操作杠模式,但是独立操纵杆模式,只能自动限定艏向,用手柄控制船舶的纵向速度。像本船的DP控制系统为Rolls-Royce DP2 ICON型,DP控制系统由一个ICON 主DP控制系统和一个PCSCON cJoy独立操纵杆系统组成,ROLLS-ROYCE两个系统的操作杆都是独立分开的,而康斯伯格的两个系统的操作杆是合二为一的,操作杆可以选择两种不同的操作系统。
(3)DP控制系统收到位置参考系统和船舶传感器的信息而计算每个推进器的推力大小(电动机扭力)和方向,以抵消风、洋流和波浪运动产生的影响来保持船舶的相对位置。DP将所有外力(包括波浪产生的力、表层流以及位置参考系统的误差)的合力进行计算,在DP上显示为“洋流”,俗称“DP流”。DP流不是实际的洋流,它也不是固定的,随着外界环境载荷的变化而变化,即使在相同的环境下,不同的艏向,DP流的变化也会非常大(由于不同的艏向,船的受力面积不同,所以外界产生的力也差异很大,一般风流合力与船舶纵向的夹角越大,DP流越大)。
3.2 运用DP模式靠泊海上设施,相关参数设置
(1)精度选择:必选高精度。
(2)增益的设定:艏向设定中和船位设定中均有增益高中低可选择,增益高低就是船舶的响应速度的快慢,高增益相对于低增益,响应更快并使得推进器更活跃,所以平静的海况选择低增益就可以免过冲,高增益应用于恶劣海况。
(3)最高船舶速度和转头速率设置,DP模式最高速度和转头速率的设定只是限定在Auto DP的模式下,所以一般最高速度设定为0.6节,转动率为40度/分。
(4)DP操作模式转心(Rotation Point)的设置:DP船可以在DP设置(settings)面板上选择Pivot,直接设置船舶在DP操纵的转心,有船中(midship)、船艏(bow)、船艉(stern)可以选择,像罗罗系统还可以直接设置在距船艏或船艉任何一个距离上。船舶在静止状态时,艏侧推的作用力产生的船舶旋转点在距船艉约1/3船长处,艉侧推的作用力产生的船舶旋转点在距船艏约1/3船长处。船舶在向前运动时,旋转中心处于距船艏(1/8~1/3)船长处,从船艏1/8船长处随着速度的增加往1/3船长处转移;船舶在向后运动时,旋转中心处于距船艉(1/8~1/3)船长处,从船艉1/8船长处随着速度的增加往1/3船长处转移。可见DP转心的设置直接影响船舶的操纵性能和推进器的负荷,可以根据实际情况巧妙的设置船舶的转心,使船舶用比较小的负荷就可以达到比较好的操纵效果。比如在船艉有管线作业过程中需要调整艏向时可以选择转心在船艉,这样船艉移动的距离就不会太大,不会影响管线作业,但是这种情况下首侧推的负荷会较大,要注意观察。
(5)自动位置和艏向报警设置:每次DP操作都应对自动船位和艏向进行预报警和报警值设置。设定的预报警值应尽量低,并且不得超过下列规定值:重要偏移极限值不得超过船舶和任何附近结构物或障碍物之间隔离距离的一半;允许偏移极限值不得超过重要偏移极限值的一半。一般靠泊海上设施,船位的预报警为2.5米,报警值为5米,艏向的预报警为2.0,报警值为3.0.
(6)系统报警值设置:(CQA)系统能力储存的报警设置至关重要,如果达到报警,就说明DP系统的能力已经没有能力控制船舶,因此DP系统就会对推进器放弃控制,一旦出现系统能力储存的预报警,就要尽短时间调整船位或者艏向,做好随时手动操纵船舶的准备。这个报警值的设置不能太高也不能太低,太低很容易就会让DP系统失去对船舶的控制,太高又容易造成船舶过载而进一步发生不可控的局面。CQA warn reserve系统能力储存的预报警,这个一般设置20%,CQA alarm reserve系统能力储存的预报警,这个一般设置10%。
3.3 规范靠泊海上设施步骤
3.3.1 船舶进入平台安全区前的准备工作
1)船舶在抵达前不少于1H与海上设施联系并报告预计抵达时间,确认作业计划和作业内容。
2)船舶接近海上设施2n mile时,值班驾驶员通知船长上驾驶台。船舶操作模式由自动舵转换为手动控制状态,航速降低至8kn以内。考虑到PSV较大的惯性和推进器不宜过快减速,建议先把转速降到60%以下,为可能的操纵做好准备,DP船舶要提前通知机舱分区(bus-tie OPEN),分区情况见图1。
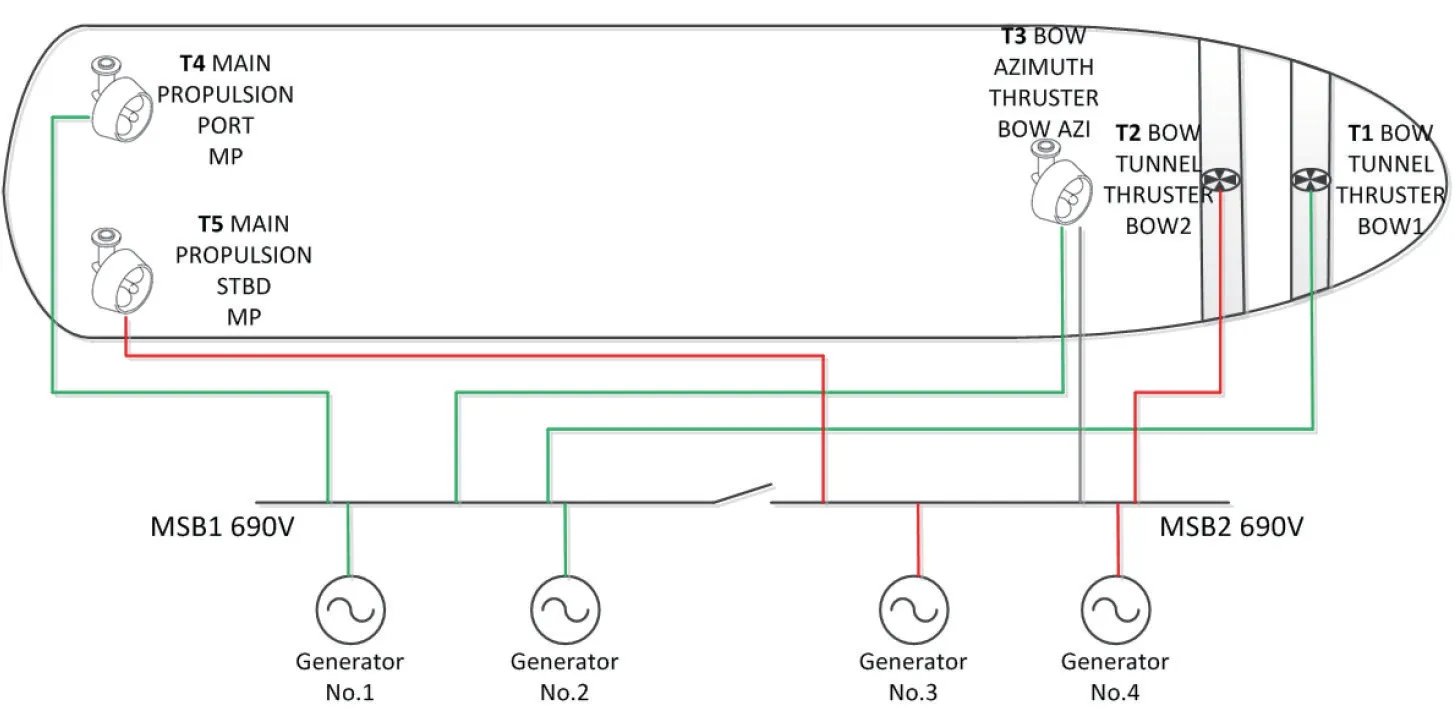
图1 德恒轮推进器及分区布局
3)船舶驾驶台、甲板作业人员需统一和海上设施统一的沟通频道,作业前开个BOX TOOL MEETING,根据作业任务,对靠泊及后甲板作业进行JSA或风险评估,并针对风险落实防范措施。
4)通知机舱做好进入安全区准备,轮机长应到机舱并完成DP机舱检查表。
5)调整艏向,把船的航迹线往海上设施的下风流一侧的500米边缘处靠近,主推慢慢降转速,接近海上设施600米处船速小于3节,然后把手操模式切换为DP模式,用DP手柄控制船舶到500m处速度降到0.5以下,启动首侧推并加入DP,转为Auto DP定位在当前位置。检查各推进器的状况,看DP的指令和推进器的执行情况是否协调,推进器的负荷情况;船位稳定后记下DP流的大小和方向,这个对下一步靠泊有很大的指导作用;检查各传感器(本船配备3台风向风速仪,3台电罗经,3台MRU运动参考装置)是否进入DP系统,运行是否良好;检查位置参考系统运行情况;完成相关设备与系统的检查,并完成“进入安全区前DP检查表”及“船舶进入海上平台设施500米半径范围安全检查表”。关闭雷达,报告海上设施中控,得到允许方可进入安全区。
6)进入安全区前,船长可以通过当前的风向风力,和DP流并结合经验可以比较准确地判断流水方向和大小,结合作业方式、当前海况选择靠泊方式和进入安全区后的操作计划。
3.3.2 进入安全区靠泊平台的操作
1)船长亲自操纵船舶,DP 船舶可以选择用DP 手柄操纵,AUTO Heading,DP手柄直接控制船舶的纵移和横移速度,把船位移到试靠点,调整合适的艏向,然后启动Auto DP。
2)进入安全区的航速不超过4kn,大型PSV惯性大,进车到倒车时间差较大,用DP手柄操纵,船长应根据自己的经验提前减速,应确保在接近海上设施时可以在安全距离内把船停住。
3)提前规划好逃离路线,逃离路线应为正常或者应急情况船舶离开作业地点提供一条明确的路径。要让值班驾驶员做好监测,确保这条逃跑路线没有其他船舶。
4)靠泊海上设施前,必须选择离海上设施靠泊处不少于1.5~2.5倍船长(取决于风流海况)为船舶试靠点,DP船舶应在试靠泊点完成DP 定位并船位保持能力验证至少15min~30min(手操船舶验证至少10min~15min)观察验证评估结果,结果满意则可按计划接近海上设施。
5)船舶靠泊方式分为船头顶风流、船尾顶风流和横风流。船头顶风流的优点:海况较差的情况下可以避免后甲板上浪,保证后甲板作业人员的安全;首推不需太大负荷运转,减小设备压力;适合作业时间较长的作业任务;缺点:海上设施的吊车对甲板货物覆盖范围可能较小;海上设施在下风时会增大作业风险。船尾顶风流的优点:相对于船头顶流,船尾顶流更易把握船舶艏向;缺点:大浪较大时后甲板易上浪影响甲板作业安全。横风流,这种靠泊方式基本不被采用,推进器负荷大,很容易造成主发负荷过大而失电。
6)确定试靠艏向和试靠点的选择非常重要,它直接影响到船舶的靠泊安全和靠泊的准确性。向德恒轮这种大型PSV试靠点一般选择在海上设施的下风流侧的海上设施纵向30度的延伸线150米处,如果必须得在上风流侧宜在200米处,且要确保能在紧急情况下逃跑。
3.3.3 驶离海上设施
1)船舶作业结束与海上设施中控沟通确认,经海上设施许可方可离开。
2)驶离海上设施前,船长应完成“驶出安全区前船舶核查表”,确认船艏安全距离内无船舶及碍航物,尽量往海上设施的下风流侧方向离开。
3)船舶的控制站或者模式转换应在距海上设施不少于1.5~2.5倍船长(取决于风流海况)外进行,避免在海上的上风流侧转换。如果需要合区巡航应选择在安全区外操作,必须要在海上设施的下风流侧,而且要确保船舶的下风流侧附近没有船舶和障碍物。
4)当与海上设施有足够的安全距离时才可进行较大幅度的转向,避免船头船尾与海上设施发生碰撞。
5)当驶出安全区后应向海上设施进行报告,船长做好与驾驶员的驾控权交接,使驾驶员明确当前操作模式、设备状态、船舶下一步动向等动态。
4.结束语
要保证DP船舶的安全靠泊,船长就必须熟悉本船的操纵性能,了解熟悉DP 操纵,能充分发挥DP的优点,但又不能完全依赖它。
猜你喜欢
黄河之声(2021年14期)2021-10-28
舰船科学技术(2021年12期)2021-03-29
交通信息与安全(2020年3期)2020-11-13
作文成功之路·小学版(2019年9期)2019-10-17
中国水产(2019年9期)2019-10-16
意林·全彩Color(2019年7期)2019-08-13
海峡姐妹(2019年7期)2019-07-26
当代陕西(2018年12期)2018-08-04
学习月刊(2015年10期)2015-07-09
世界海运(2015年7期)2015-04-05
