基于合同网的巡飞弹任务分配算法及模型
2023-03-07 02:43张传昊李豪杰陈志鹏
探测与控制学报 2023年1期
张传昊,李豪杰,于 航,陈志鹏
(1.南京理工大学中法工程师学院,江苏 南京 210094;2.南京理工大学机械工程学院,江苏 南京 210094)
0 引言
网络化弹药是无人机与弹药相结合的产物,巡飞弹便是网络化弹药的典型代表[1]。随着武器装备的无人化、智能化发展,通过集群弹药进行分布式探测、协同决策、协同打击成为了一种新的作战模式。在我方未提前获得战场目标具体打击信息情况下,巡飞弹在其巡飞阶段可以对目标类型、位置等信息进行实时获取,当发现战场存在多种目标时,需要哪些节点弹药对哪个目标进行打击的问题可通过多节点间控制系统决策来解决,若随机选择某一打击目标则无法发挥集群弹药协同作战的优势。通过多系统间的信息交互做出合理高效的打击与安全控制决策,不仅可以保证弹群对各目标打击的合理选择以及各目标任务的合理分配,而且可以控制巡飞弹巡飞状态与待发状态之间的安全转换。
目前,不论是封控子弹药还是巡飞弹药大都选择分布式网络拓扑结构进行自组网,而合同网算法是分布式任务分配算法中较为常用的一种,其各角色分布式通信和信息处理的方式让其具备很强的拓展性和鲁棒性。国内外学者基于无人机的作战方式对合同网算法的改进展开了大量研究[2-4]。文献[5]通过引入并发机制解决了对无人机实时任务分配问题。文献[6]通过引入历史任务效能及无人机自身任务负载优化无人机投标策略,降低了系统通信量。文献[7]通过任务负载率指标与令牌环网相结合解决了招标者及任务分配不合理的问题。
目前对基于巡飞弹作战的任务分配问题研究较少。巡飞弹的消耗性决定了其至多执行一次打击任务,无法通过任务负载率的大小评判各节点是否需要对自身拥有的任务进行招标或者是否具备更好的打击条件来执行其他任务,进而导致无法确定招标节点以及具备最优打击条件的投标节点。此外,多个任务并行分配的方式会使得巡飞弹群无法找到执行各目标打击任务的最优解。
为了适应巡飞弹的集群作战模式,开展巡飞弹药任务分配策略研究,本文结合威胁评估方法,引入对目标的打击效益及降标分配方式,在尽量减少各控制系统间信息交互次数的情况下,实现巡飞弹群对不同威胁度目标的最优打击节点的选拔,进而对巡飞弹药各节点进行安全状态控制。
1 经典合同网算法
合同网算法[8]由Davis和Smith于20世纪80年代提出,模拟了人类在商业活动中“招标-竞标-中标-签约”机制,通过多个具备通信和信息处理能力个体之间的协商,追求全体最优解来解决分布式任务分配的算法。
经典合同网任务分配流程如图1所示。
图1 经典合同网的分配流程Fig.1 The distribution process of the classic contract net
经典合同网算法可用来实现对目标攻击时的决策,通过信息交互与处理,进行任务分配,控制弹药由巡飞转换为待发状态以及对目标的打击。但对于巡飞弹药协同作战的模式,还存在以下不足之处:
1) 多种目标同时存在时无法确定任务分配先后顺序。巡飞弹药在协同探测的过程中,会遇到多目标同时出现,不同节点探测到的多个目标信息会通过信息交联共享到其他节点,如何选择多个目标中的一个作为本次任务分配是待解决的问题。
2) 所有弹药节点都参与通信,通信量大,影响攻击决策的实时性和可靠性。由于没有对比标准对自我打击目标效益进行评估,导致各节点弹药都认为具备对各目标的打击能力。对于一定数量的巡飞弹药来说,多对一的通信方式加大了弹药节点间的通信负担,易出现信道堵塞、信息丢失等,影响多弹控制系统间信息传输的可靠性。
3) 无法实现多弹同步打击的饱和攻击。巡飞弹药协同打击要求对单个目标选拔出多个较优打击弹药,实现对重点目标的饱和打击。
2 巡飞弹任务分配算法及模型
2.1 基于合同网优化的巡飞弹任务分配算法
针对巡飞弹药进行任务分配的需求,以提高决策效率、减少通信数据量为目标,在任务分配过程有以下规定:
1) 战场仅有单目标存在时,无需进行威胁评估。多目标时按照各目标威胁度确定目标分配次序。威胁度大的目标优先进行分配,由探测到该目标的节点弹药担任招标者。
2) 根据各弹特征,引入打击效益及其各项指标作为决策参考依据。各目标的探测节点共享目标信息时要附带自身对该目标打击效益Es及各指标值作为标准。
Eij>Es时,认为节点i相比于探测节点对目标j有更优的打击位置及成功率。
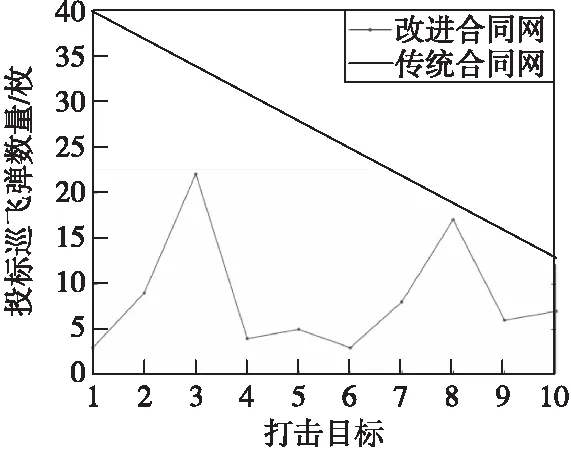
Eij 3)多弹选拔,降标分配。打击效益高于标准效益的节点进行投标,选择打击效益值最大的前N个弹药作为中标者。i 算法总流程为: 1) 初始化目标类型、位置,各节点的各指标信息。 2) 目标信息及打击效益共享。 3) 仅存在单目标,即目标数量Nm=1时,进行步骤4);多目标存在时,即Nm>1时,各节点各自进行两次威胁评估确定最终的各目标威胁度排序。 4)Eij>Es的节点参与投标。 5) 若i 6)N个节点收到任务后从巡飞状态到待发状态准备对目标进行打击。 7) 更新未选中节点位置与速度方向,返回步骤4),未被选中各节点保持巡飞状态,进行下一目标的自我评估和多弹选拔。 图2为巡飞弹任务分配流程图。 图2 巡飞弹任务分配流程图Fig.2 Flow chart of task assignment of cruising munition 假设在战场中存在n个目标,且n>1,我方有m枚巡飞弹药在巡飞状态,通过威胁评估、各节点打击效益以及对目标的总体打击效益模型来确定m枚弹药对不同n个目标的最优分配结果。 2.2.1多目标威胁评估模型 为了在多种目标存在的情况下确定巡飞弹群打击任务分配顺序,通过层次分析法与熵值法以及TOPSIS排序法分别针对己方弹群与我方阵地来确定各目标的威胁度大小,最后经过线性相加降序排列后进而确定任务分配的顺序。 本文选取目标类型、搜索能力、机动能力、打击能力、相对位置关系5项指标作为目标威胁度评判属性。采用层次分析法与熵值法分别确定各目标威胁属性的权重大小。对于层次分析法,需要对目标威胁属性层各属性重要程度进行对比确定目标属性矩阵,通常用模糊评价语言的方式对其进行定性处理,利用G.A.Miller指标标度法将目标静态威胁指标划分为9级[9],分别为极大、很大、大、稍大、中等、稍小、小、很小、极小。本文用0~10之间的数值对各级模糊评价进行映射,如表1所示。 表1 模糊评价语言等级及其数值映射Tab.1 Fuzzy evaluation language level and its numerical mapping 再通过目标属性对比矩阵得到其最大特征值对应的特征向量,归一化后通过一致性检验得到主观评价的目标各属性威胁权重值φ。 通过模糊评价法及其数值映射确定各目标分别对各属性的威胁度,构建目标威胁度矩阵Xij(i=1,2,…,n;j=1,2,3,4,5)。利用熵值法得到各属性的权重。将层次分析法与熵值法得到的权重分别按式(1)进行线性相加得到组合权重作为各个属性的最终权重。其中既包含了人为主观意愿,也考虑了客观事实。 ω=aφ+bΩ, (1) 式(1)中,a+b=1。 最后采用TOPSIS法求得各目标的相对贴近度,此贴近度即为各目标相对威胁度大小。由于建立威胁度矩阵的对象不同,可以得到两组各目标威胁评估结果,通过线性相加决定最终的威胁评估结果C。 C=αC1+βC2, (2) 式(2)中,α+β=1。 最终将威胁评估结果C降序排列就是巡飞弹群所需要的任务分配次序D。 2.2.2各节点打击效益模型 为了各节点自我评估量化以及标准指标的确定。引入打击效益Eij,打击效益反映出各节点执行对目标打击任务的综合效益,计算公式如下: Eij=Rij-(Hij+Zij+Sij), (3) 式(3)中,Eij为打击效益,Rij为节点i对目标j的打击收益,Hij为节点i打击目标j的航程代价,Zij为节点i打击目标j的转向代价,Sij为节点i打击目标j的损失代价。 设巡飞弹药i被选拔执行对某目标j的打击任务,巡飞弹药弹目交会过程中稳定跟踪目标且成功起爆概率为Bi,巡飞弹药输出毁伤元成功毁伤目标的概率为Fi,打击收益则可以表示为 Rij=Bi·Fi。 (4) 打击目标与巡飞弹间的相对位置因素也决定了各弹对目标的打击代价。巡飞弹任务分配过程中为了减少各节点的通信压力,默认各节点无法获得巡飞弹群中所有弹药与目标间距离的最大值信息。为了方便各项指标的共同计算,以招标节点到目标的距离为标准,对巡飞弹药在打击过程中的航程代价标准化处理进行计算,可以表示为 (5) 式(5)中,Dij为各节点与目标的距离,Dtj为探测节点到目标的距离,探测节点自我评估时默认该值为0。可以看出,当节点距目标距离越小,其航程代价越小,进而对打击效益的增益越大。 转向代价为节点弹药当前速度方向与节点与目标连线的夹角。与航程代价相同,以招标节点的角度值为标准,为方便各项共同计算以及各节点对比,转向代价通过标准化可以表示为 (6) 式(6)中,θij为节点i当前速度方向与节点i与目标j连线的夹角,θtj为探测节点t探测到目标j时速度方向与其和目标j连线的夹角。探测节点自我评估默认该值为0。与航程代价同理,节点打击目标的转向角度越小,其角度代价越小,对打击效益的增益越大。 损失代价可以表示为 Sij=1-(1-Oi)·(1-Ji), (7) 式(7)中,Oi为巡飞弹药被摧毁的概率,Ji为巡飞弹药由于打击过程中脱网或者由于解保环境信号阈值、时序异常引信已进入绝火状态而无法起爆的概率。 2.2.3对各目标总打击效益模型 为了代表对多目标的分配结果,设目标分配矩阵为Pij,可以表示为 (8) 式(8)中,i=1,2…,m;j=1,2…,n。 为了找到巡飞弹群对各目标打击总体打击效益的最大值,可以表示为 (9) 设定巡飞弹在任务分配过程中位置坐标为 {(x,y)|x={x1,…,xm},y={y1,…,ym}},且每个目标都需要N枚弹药进行打击。对于巡飞弹药进行各目标任务分配,有以下约束: (10) C(Dj)>C(Dj+1),∀j=1,2,…,n, (11) (12) (13) 式(10)代表巡飞弹药进行任务分配时的动态过程,要求各节点的指标参数在随时变化,各节点对各目标进行自我评估时的位置、速度方向不同。式(11)要求各目标的打击任务顺序由各目标的威胁度来决定,先执行的任务其对应目标威胁度越高。式(12)要求各目标都必须由N枚弹药进行打击。式(13)代表巡飞弹的消耗性,要求每个节点弹药最多只能对一个目标进行打击。 2.2.4毁伤评估 为了确保对各目标的完全毁伤,毁伤评估可以作为是否需要巡飞弹对某目标再次打击的有力判据。巡飞弹群可以通过层次分析法与模糊综合评价法相结合,准确评估打击后的毁伤效果,有助于弹群的自主决策,实现对目标的精确打击与完全毁伤。 为了验证本文针对巡飞弹协同作战设计的任务分配的可行性,进行仿真验证。 假设某战场有5类目标,分别为防空导弹车、火箭炮、单兵、坦克、步战车,其位置坐标分别为(800,720),(900,660),(760,755),(1 040,660),(720,760)。设定同构巡飞弹数量为20枚,其巡飞位置的横纵坐标均在0~100范围内,各节点的速度方向与节点和目标连线夹角在0~90°范围内随机设置。 各节点首先对这5类目标进行两次威胁评估,本文将目标类型、搜索能力、机动能力、打击能力、相对位置关系5种目标属性的重要程度确定为{8,6,5,7,6},根据层次分析法得到前文5种属性的相对权重值分别为{0.250 0,0.187 5,0.156 2,0.218 7,0.187 5}。表2为针对我方弹群与阵地的各目标威胁度。 构建目标威胁度矩阵,通过熵值法求得矩阵{0.182 7,0.110 5,0.100 7,0.556 5,0.049 7}, {0.252 3,0.102 7,0.139 1,0.437 3,0.068 6},与层次分析法求得的权重线性相加得到最终结果为{0.216 3,0.149 0,0.128 5,0.387 6,0.118 6},{0.251 2,0.145 1,0.147 7,0.328 0,0.128 1}。 最后对TOPSIS法得到的两个目标威胁度排序进行线性相加确定最终的目标威胁评估结果为{0.670 2,0.561 2,0.339 0,0.440 5,0.382 5},各威胁度从大到小依次为防空导弹、火箭炮、坦克、步战车、单兵。 表2 针对巡飞弹群的各目标威胁度Tab.2 Threats to each target of the cruising munition group 表3 针对己方阵地的各目标威胁度Tab.3 The threat level of each target against one’s own position 算法仿真过程如图5所示。 图5 针对威胁度不同的各目标打击弹组选拔过程Fig.5 The selection process of each target strike group with different threats 图5(a)为初始化时弹群与目标的位置,图5(b)首先针对威胁度最高的目标1即防空导弹进行打击弹组选拔,选拔出3枚巡飞弹药进行打击,图5(c)、(d)、(e)、(f)分别对弹群位置及角度等各项指标进行更新,根据威胁度排序依次对火箭炮、坦克、步战车、单兵完成多弹选拔。 根据仿真过程中各节点对自身打击效益的计算,5次任务分配选拔出的打击节点序号及各节点参数如表4所示。 表4 各目标对应的打击弹组序号及其投标时位置、角度Tab.4 The serial number of each target corresponding to the munition group and its position and angle when bidding 可以看出各节点按照目标威胁排序,依次进行任务分配,选拔出的3个节点具有较优的打击位置以及较小的转向角度。图6为每次任务所有节点打击效益排序,可以看出,被选拔出打击5个目标的各弹组均具有对该目标的最高打击综合效益,验证了巡飞弹对威胁度不同的目标任务分配算法的可行性。 图6 任务分配过程中各节点打击效益排序Fig.6 Ranking of each node’s impact on the benefits in the process of task allocation 图7为本文算法与经典合同网算法对比,对10个威胁度不同的目标进行任务分配,不考虑经典合同网算法无法按照目标威胁程度进行任务分配,默认经典合同网与改进合同网同时对相同目标进行任务分配。通过对比可以发现,由于经典合同网算法没有确定选拔的打击效益标准,所有节点均认为可以对该目标进行打击,而本文算法通过利用打击效益标准的引入大大减少了每次目标分配的投标节点数量,对每个目标的投标弹数平均减少了79%,有效地排除了打击效益较低的节点。 图7 经典合同网与改进合同网各任务投标弹数对比Fig.7 Comparison of the number of bids for each task of the classic contract network and the improved contract network 图8为本文改进算法与经典合同网算法的投标总次数对比图,仿真次数设为30,每次仿真对10个威胁度目标进行任务分配。可以看出,在每次完成所有目标分配的各节点投标总次数都远远低于经典合同网中的投标次数,平均减少了47.89%,大大减小了控制系统间的通信压力,保证各节点信息传输的可靠性,提高了对多目标任务分配的效率,达到了预期的效果。 图8 经典合同网与改进合同网总投标次数对比Fig.8 Comparison of the total number of bids between the classic contract network and the improved contract network 通过改进合同网算法来适应巡飞弹多弹协同打击目标的模式,由目标威胁等级的高低决定打击各目标任务分配优先级,引入标准打击效益与节点自我判断来排除部分效益低的节点,仿真验证了本文设计的巡飞弹任务分配算法的可行性,发现每完成10个目标的任务分配所需要的信息传递总次数平均减少了47.89%,不仅明显减轻了巡飞弹群网络系统的通信负担,且能选拔出打击效益较高的多个节点执行目标打击任务,提高了巡飞弹药的综合打击效益。
2.2 巡飞弹任务分配模型

3 仿真验证
3.1 任务分配过程仿真



3.2 与经典合同网算法对比

4 结论
猜你喜欢
文萃报·周五版(2022年46期)2022-11-25轻兵器(2022年4期)2022-04-25小学科学(学生版)(2021年8期)2021-08-30铁道建筑技术(2021年4期)2021-07-21石油化工建设(2019年4期)2019-10-10建材发展导向(2019年10期)2019-08-24中国测试(2018年10期)2018-11-17中学生数理化·八年级物理人教版(2018年9期)2018-11-09中国军转民(2017年7期)2017-12-19北京航空航天大学学报(2016年8期)2016-11-16