大型养殖工船养殖舱壁清洁机器人设计
2023-03-01 03:17林礼群王云杰
船海工程 2023年1期
林礼群,王云杰
(中国水产科学研究院 渔业机械仪器研究所,农业部远洋渔船与装备重点实验室,上海 200092)
深远海大型工船养殖是拓展我国水产养殖空间,提升我国深远海渔业资源利用能力,推动渔业“提质增效”生产方式转变的重要途径之一[1-2]。养殖舱是深远海养殖工船养殖鱼类生长环境的直接承载空间,在养殖过程中其壁面会不断附着或沉积海生物及养殖污物,如不定期清除,会直接影响鱼类的正常生长。养殖舱壁面附着物的清除是工船养殖作业关键环节之一,也是目前亟待解决难题。现有市场上较成熟的水下清洁产品主要是针对10 m内深度游泳池开发,满足不了养殖工船上大深度、易晃荡、耐海水腐蚀与贝类坚硬附着物的清除要求;而针对船体表面清洗设备,国内主要采用水上作业形式,或水下半自动化作业装备,大多采用坚定的钢刷或高压水喷射装置清洗,容易去除表面防锈材料,且大多在大型船坞开展,其清洗设备成本高[3-6];目前国内已陆续研发出的船舶表面水下清洗样机,在实际应用中发现存在壁面吸附不稳定、推进器噪声扰动大、清洁效率低等问题,离工程应用还有很大差距。
通过开展适用于养殖舱壁高效清洁的水下机器人技术分析,构建清洁机器人本体结构、控制系统、软件系统方案,并开展移动吸附模块受力分析、图像清洁度识别等关键技术的设计,制作水下清洁机器人样机并开展清洗验证试验,以期实现高效、智能清除工船舱壁表面附着海生物与养殖污物,完善深远海养殖工船养殖污物去除装备体系。
1 系统构建
1.1 技术要求
养殖舱的布置及几何结构简图见图1,每船布置有15个相同大小养殖舱,每个养殖舱体养殖水体约5 600 m3,水下舱壁壁面面积约1 600 m2:水下清洁机器人工作条件与技术要求如下。

图1 工船养殖舱布置示意
1)养殖舱内,海水环境,水深15 m内。
2)养殖舱壁的附着污物主要为鱼类排泄物、剩余饲料及少量藻贝类海生物。
3)水下清洁机器人清洗效率≥400 m2/h,频率为每舱1次/周。
4)水下清洁机器噪声小,减小对养殖鱼群生长影响。
1.2 水下本体结构
水下本体部分需尽量做到结构简单,除了执行功能作业的元器件以外,大幅减少运动机构与电气元件,可靠性高。机器人本体结构简图见图2。首先,为实现机器人在舱壁上行走灵活且行进清洁速度高,选择轮式行走机构,行走机构包括前端2个驱动轮,以及后端起支撑作用的万向轮。其次,根据工船养殖舱的材料属性,在吸附方式上选择永磁吸附形式,将磁性材料增加到3个行走轮中,可极大减少水流扰动;清洁工具选择转刷与滚刷复合清洁方式,机器人在转刷清扫后,有清洁滚刷做二次清洁,结合前后两台摄像机,对比清洁前后效果并反馈到岸机工控机。与现有其他水下清洁结构型式相比,全部去掉螺旋桨推进器,而只采用3个磁力轮便可实现贴壁行走与吸附功能,可减少水中多自由度运动控制的复杂难度以及对养殖水环境的扰动,节省研发成本。

图2 水下清洁机器人本体结构示意
1.3 电控系统
电控系统由水上电控和水下电控两部分组成,水上控制系统包括工控机和电源转换模块,水上控制系统主要作用是为水下清洁机器人主体状态显示、水下视频显示与记录、水下传感器显示。水下控制器接收水上控制系统的指令,返回传感器所检测的各类信息,其核心是STM32嵌入式单片机。如图3所示,现场提供船用电源380V AC,需转换为两路对应电源分别给岸基工控机和水下机器人供电,其中岸基工控机的电源为220 VAC,机器人电源为300 VDC,通过脐带缆传入水下,工控机发出的控制信号通过脐带缆电力载波方式传入水下,300 VDC电源直接给行走机构驱动器和滚刷电机供电。电源管理模块提供12 VDC电源给低压电气使用,包括照明灯和STM32控制器,STM32控制器通过PWM信号控制照明灯亮度,同时采集深度、航姿、航向,视频等信号回传给岸基工控机。行走机构核心为两台带霍尔信号的直流无刷电机,由Odrive驱动器控制,当工控机对机器人运动发出指令,会由STM32控制器的CAN口发出信号,控制电机运动。
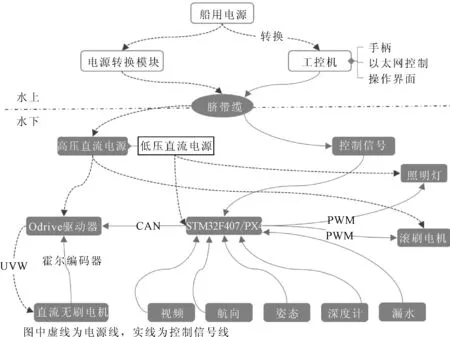
图3 工船水下清洁机器人系统组成
1.4 软件系统
水下机器人软件系统分为上位机监控软件和下位机软件两部分。上位机监控软件主要包括监控机模块、特征信息模块、控制模块和报警模块[7]。其中,监控机模块功能为视频图像采集、拍摄和储存;特征信息模块主要显示和存放行走方向、深度等信息;控制模块负责接收键盘、鼠标、手柄、电脑触摸屏的信息,根据当前运动状态设置电机驱动参数,发送至水下控制系统;报警模块显示过压、过流、漏水等报警信息,对异常信号进行报警,并把报警数据存入电子表格。下位机软件程序见图4,中断程序负责提高处理器事件的有效性和实时性,其中,电力载波通讯程序的优先级比较高,实时响应上位机的数据;惯导接收程序用来接收航向、姿态传感器的数据。定时中断程序对电力载波通信进行定时复位,如果计数器达到计数阀值,则计数标志位复位,当电力载波通信出现故障或者通信超时,没有及时复位计数标志位,那么在定时器中断时,会把电力载波通信接收标志复位,重新接收,有效提高通信的稳定性和抗干扰性。
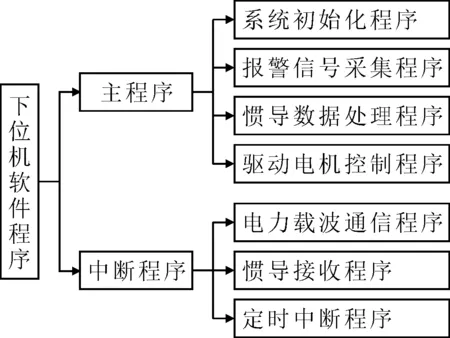
图4 下位机软件程序结构
2 关键技术方案设计
2.1 磁力吸附设计
水下清洁机器人在养殖舱表面灵活移动与可靠吸附是实现稳定高效清洁作业的前提,清洁机器人需要获得与之匹配的驱动力矩和磁吸附力,保证其在养殖舱表面稳定运动[8]。为此对水下清洁机器人所处的不发生倾覆和打滑状态进行受力分析。
由于清洁机器人运动本体相对养殖舱体较小,且壁面较平滑,可将其简化成与水平面夹角为β的平面,力学模型见图5,G是机器人重力,Fb是机器人在养殖海水中的浮力,Fmn(n=1,2)是养殖舱壁面对机器人驱动轮的磁吸附力,Fm3是养殖舱壁面对机器人万向轮的磁吸附力,Ffn(n=1,2)是驱动轮在养殖舱壁面的摩擦力,Ff3是万向轮在养殖舱壁面的摩擦力,Nn(n=1,2)是驱动轮在养殖舱壁面所受的支持力,N3是万向轮在养殖舱壁面受到的支持力,H是机器人本体的重心距舱壁的高度,l1是万向轮中心沿壁面到机器人重心的距离,l2是驱动轮中心沿壁面到机器人重心的距离。上述所有力学符号的单位均为N,长度或距离单位均为m。

图5 水下机器人受力模型
磁力轮最小吸附力应该满足
根据上式,结合机器人本体结构的相关参数:摩擦系数u为0.5,重力G为650 N,浮力Fb为420 N。重心距养殖舱壁的高度H为200 mm,驱动轮到机器人重心的距离l2为486 mm,万向轮到重心的距离l1为465 mm,将各个参数代入上式,倾角变量β从0°~90°取值,当β=90°时,得出的磁力最大为171 N,即单个磁力轮最小吸附力Fm≥171 N,可保证其在养殖舱表面稳定运动。
2.2 基于机器视觉清洁度识别设计
水下清洁机器人的机器视觉清洁度识别系统是以养殖舱壁面图像为研究对象,通过采集大量清洁情况图像数据,对采集的图像进行预处理,使用机器学习算法分析得出养殖舱清洁度图片特征及评价指标,以判断清洁区域是否达到清洁要求,得出结果决定否重新清洁。工作流程见图6。其中,图像预处理的目的提高量化评价准确性,本研究对图像预处理采用了图像灰度化、除噪、锐化3种方式,在完成图像预处理以后,通过对养殖舱壁清洁度进行分析评价,得出清洁度的评价指标,用以判断养殖舱清洁机器人的清洁效果。在图像清洁度分析评价流程见图7,采用基于纹理匹配的共生矩阵相似度匹配法,该方法是将机器人清洁养殖舱的实时图像与洁净的养殖舱壁的模板图像进行相似度匹配,得出的相似度值越大表明图像相似程度越高,即养殖舱壁面清洁越干净。
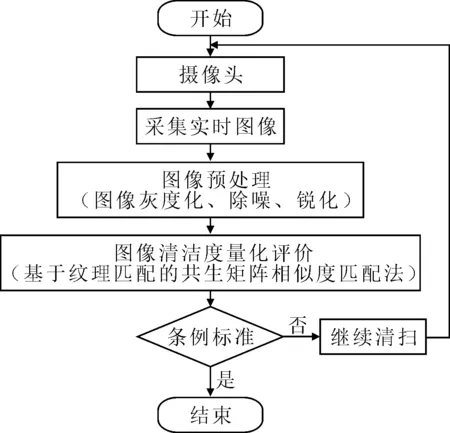
图6 清洁度识别基本工作流程
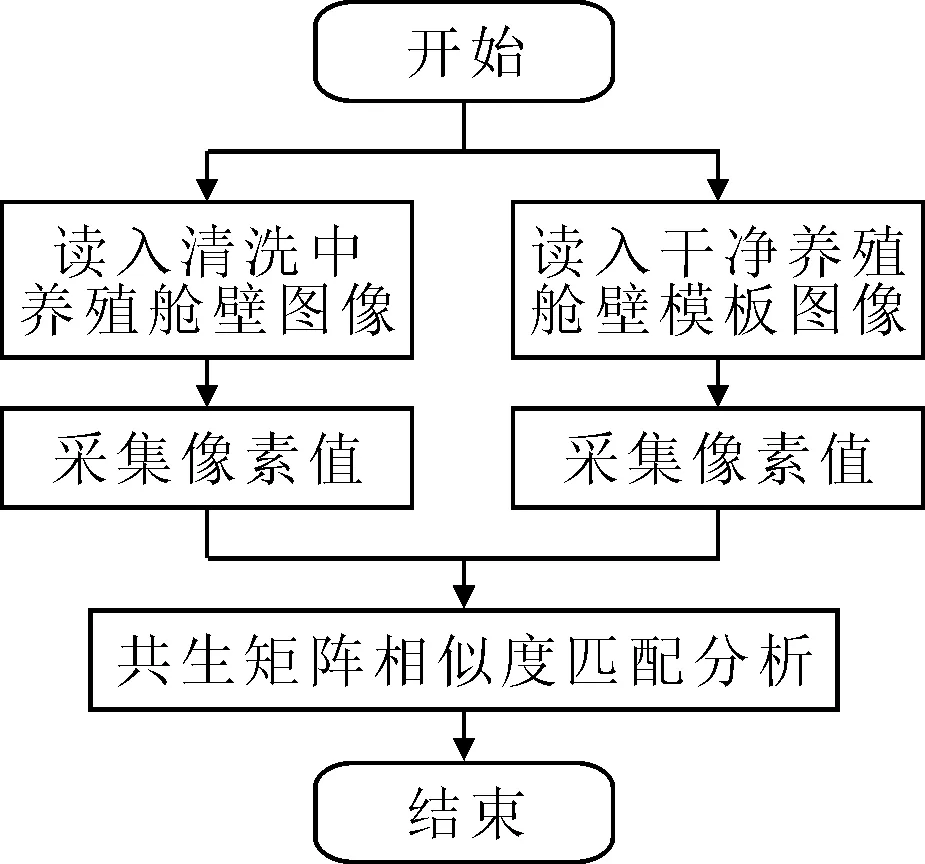
图7 共生矩阵相似度匹配流程
具体实现方法:首先,将摄像头采集的养殖舱壁面彩色数字图像转化成为灰度数字图像以提高图像分析软件的处理速度,彩色图像的像素点是由R(红色)、G(绿色)、B(蓝色)3个基色分量共同决定,而灰度图像每个像素只有一个采样颜色的图像[9],采用加权平均法对彩色图像的R、G、B 3个基色分量处理得到灰度数字图像;其次,采用中值滤波法对图像进行除噪,中值滤波器可以做到既去除噪声又能保护图像的边缘,从而获得较满意的复原效果,其基本原理是把数字图像或数字序列中1点的值用该点的1个领域中各点值的中值代换,其主要功能是让周围象素灰度值的差比较大的像素改取与周围的像素值接近的值,从而可以消除孤立的噪声点,较好地保留原始图像内有效的细线状物体和保持图像跃变部分;第三,针对图像边界出现的模糊现象,采用图像锐化技术可使得图像边界更加清晰,微小颗粒的图像特征变得明显,其中,图像锐化采用Laplacian算子。最后,采用基于纹理匹配的共生矩阵相似匹配法计算对比图片的相似度,得出清洁度的评价指标,根据设定的相似值是否达到清洁度要求,决定是否需要继续清洁壁面。
3 试验与分析
3.1 试验装置及过程
机器人清洁试验在养殖工船中试船上开展,试验装置见图8。其中,养殖工船中试船(图8c))属于全球首艘10万t级智慧渔业大型养殖工船中间试验船,中试船总吨位约3 000 t,排水量约6 800 t,在国内海域开展大黄鱼、大西洋鲑等主养品种深远海工船养殖中试试验。船上设有3个养殖舱(见图8c))与图8e)),养殖舱尺寸为8.82 m×7.8 m×5.15 m(液位高度4.1 m)。清洁机器人岸基电源设备接电到船上380 V电源上,控制箱缆线转接缆连接至缆轴上,缆轴线缆连接至水下清洗机器人上。

图8 水下清洁试验装置
试验前,先检查水密头是否插紧锁紧盖和绑带是否紧固到位,将标配部件按照事先定义好的说明与电子仓之间进行对接,再检查螺钉有无缺失,是否安装到位,外观有无磨损破损等不良情况。确定无误后,将机器人放入养殖舱中并接通机器人电源开始清洗试验。清洗养殖舱侧壁试验时:清洗机器人按一定深度进行自动清洗作业,设置养殖舱侧壁行进一圈时间,清洗一周完成后自动进行进行下一深度清洗,直至水底。清洗养殖舱底部时,清洗机器人在水下进行发散性自动清洗,以下水原点为中心,行进一定时间后自动进行转向清洗,直至判定底部清洁完成。记录机器人行进速度,观察并测算清洗效率。
3.2 试验结果
试验显示水下清洁机器人运动状态良好,并在控制箱上显示水下图像,清洗噪声小,机器人下水后磁力轮可吸附在养殖舱壁上并通过转刷与滚刷进行清洗,在清洗过程中机器人行进稳定,未出现倾覆与打滑现象,平均行进速度10.6 m/min,养殖舱侧壁清洗效率430 m2/h,养殖舱底部清洗效率380 m2/h,由于养殖舱侧壁面积接近底部面积2倍,整舱的平均清洗效率约为413 m2/h,满足设计要求。
4 结论
围绕养殖工船舱内养殖鱼类良好生长环境的清洁需求,开展了适用于养殖舱壁高效清洁的水下机器人研究,设计了以磁力轮式行走方式与基于机器视觉的清洁度图像识别技术的养殖舱壁清洁机器人。分析了水下清洁机器人在养殖舱表面稳定运动的力学模型,为确定机器人所需的吸附力提供了设计参数;详述了脐带缆水下定位与清洁度图像识别的具体实现方法,并在养殖工船中试船上开展机器人清洁试验,平均清洗效率为413 m2/h,清洗效果良好,试验结果满足了所需技术需求,可为类似使用场景的水下清洗机器人设计提供参考。
猜你喜欢
汽车实用技术(2022年13期)2022-07-19
装备制造技术(2020年4期)2020-12-25
铁道通信信号(2020年12期)2020-03-29
制造技术与机床(2018年11期)2018-11-23
汽车零部件(2016年6期)2016-07-18
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
中国当代医药(2015年17期)2015-03-01
自动化博览(2014年6期)2014-02-28