
基于不完全线齿轮传动的仿蝗虫跳跃机构设计
2023-03-01 01:32刘立崴张林贝子丁江
机床与液压 2023年2期
刘立崴,张林贝子,丁江,3
(1.广西大学机械工程学院,广西南宁 530004;2.广西水利电力职业技术学院,广西南宁 530023;3.广西制造系统与先进制造技术重点实验室,广西南宁 530003)
0 前言
随着机器人在地形探测[1-3]、军事侦察[4]、抢险救灾[5-6]等众多室外领域的应用,机器人面临的环境愈发复杂,这对机器人的运动能力是巨大的考验。与常规的轮式或履带式驱动机器人相比,跳跃机器人具有更好的越障性及环境适应性,因此具有广阔的研究前景[7]。
在自然界中,蝗虫、跳蚤、弹尾虫等许多动物以跳跃的方式提高运动效率,这给跳跃机器人/机构的研究带来很多启示。ZAITSEV等[8]基于蝗虫设计了一种小型跳跃机器人,通过在微型电动机的轴上缠绕一根类似肌腱的金属丝来扭转弹簧获得动力。JUNG等[9]研究了跳蚤的跳跃机制,分析了其腿部刚度对跳跃能力的影响,发现优化腿部柔顺性可提高跳跃机器人的性能达5%。宋亚杰、吴东[10]模拟袋鼠腿部结构设计了一种四连杆跳跃机器人,通过凸轮使得拉簧收缩释放能量进行跳跃。JIANG等[11]设计了一种通过碳钎维带储能的仿水黾机器人,该机器人具有较好的水上跳跃能力。
蝗虫具有优异的跳跃性能,且跳跃机构简单高效。本文作者通过对蝗虫跳跃机制的研究,结合尺寸小、质量轻、传动比大的线齿轮[12]提出一种新型跳跃机构,该机构在具备良好跳跃能力的同时也可实现间歇运动,且线齿轮的应用有效减小了跳跃机构的体积,满足了跳跃机构微小化的趋势[13]。
1 跳跃机构设计
图1为本文作者设计的仿蝗虫跳跃机构,该机构主要由传动部分和跳跃执行部分组成。其中,传动部分包含一组不完全线齿轮,由电机驱动并控制,为传动部分提供周期性间歇运动;跳跃执行部分实现跳跃弹跳运动,并由弹簧作为储能元件;两机构间通过腱状线连接。
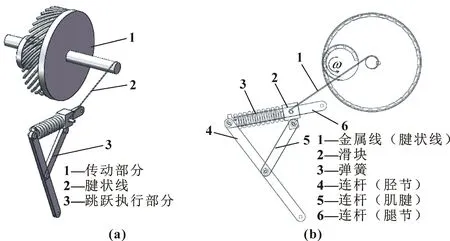
图1 跳跃机构三维模型(a)及示意图(b)
1.1 传动部分设计
传动部分主要为不完全线齿轮组。线齿轮的线齿接触线方程、中心线方程都是在空间曲线啮合坐标系中求取[13],如图2所示,图中O-xyz为主动线齿轮的固定坐标系,O1-x1y1z1为其转动坐标系;从动线齿轮的固定坐标系为Op-xpypzp,转动坐标系为O2-x2y2z2。其他参数分别为:a为Op到z轴的距离;b为Op到x轴的距离;θ为主/从动轮角速度夹角;ω1、ω2分别为主动轮、从动轮的角速度;φ1、φ2分别为主动轮及从动轮从任意时刻起转过的角度。
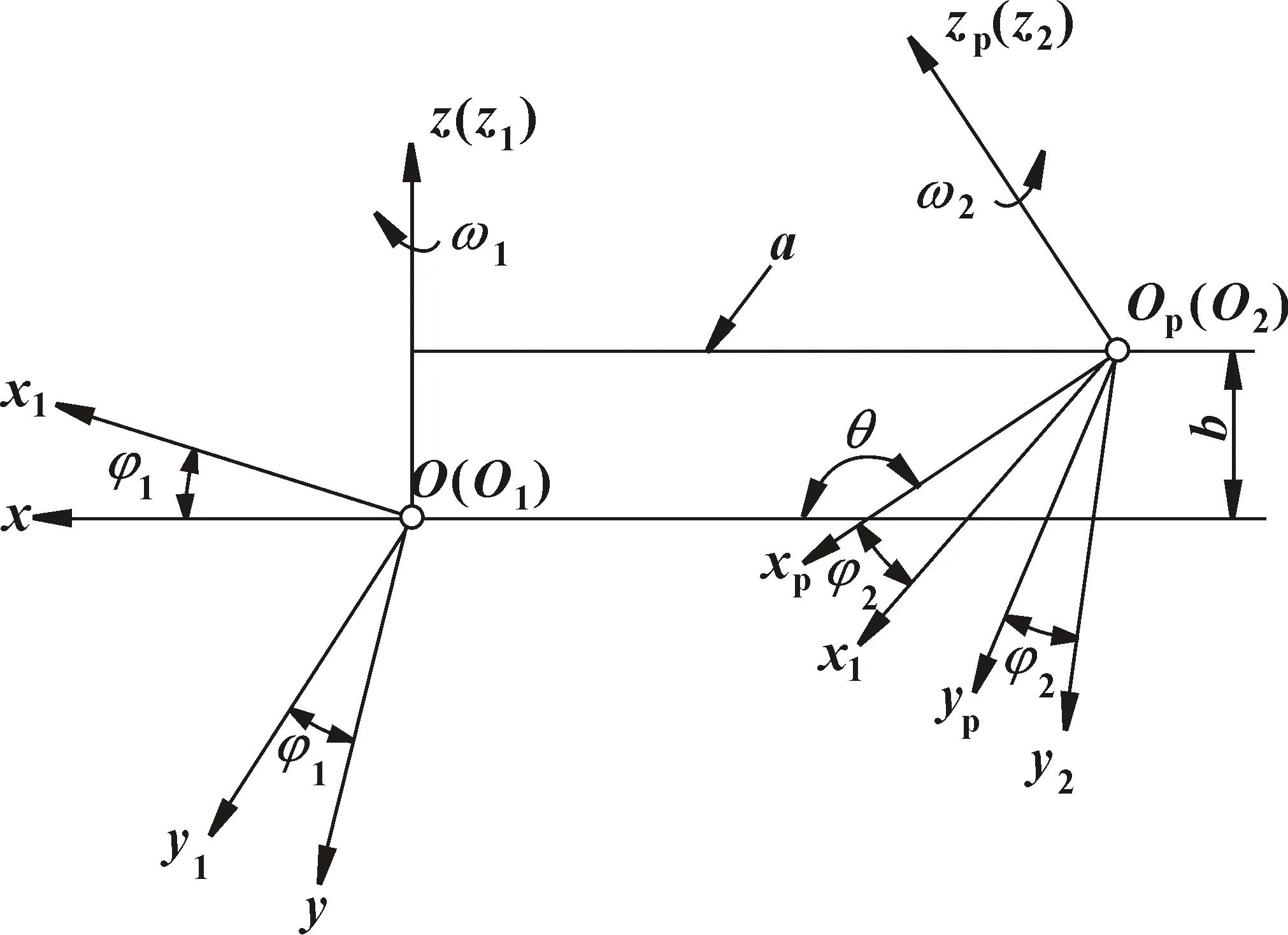
图2 线齿轮空间啮合坐标系
选取线齿轮常用的空间圆柱螺旋线作为主动线齿轮接触线方程,其方程[14]为
(1)

从动线齿的接触线方程为
(2)
主动线齿中心线方程为
(3)
从动线齿中心线方程为
我宛如掉进冰窟窿一样,灰心丧气,浑身冷得发抖。突然,门开了,白丽筠走了进来,高跟鞋笃笃笃地敲击地面。我热情地向她表示欢迎,不料从白丽筠的身后闪出一个戴黑面罩的男子,露出两只恐怖的眼睛,一下子闪到我的身后。他的胳膊与我的胳膊扭绞在一起,我动弹不得,他却腾出双手搬着我的脑袋,猛地一拧,我的头颅就掉了下来,好像瓜蒂熟透的西瓜那样……
(4)
式中:r1为主动线齿半径,r2为从动线齿半径,r1、r2可根据需要的强度进行设计。当m、n、a、b、θ、i12六个值都确定时,可以得到唯一的线齿接触线[13]。文中所取参数如表1所示。所选参数中,Z1、Z2分别为主动线齿轮与从动线齿轮的线齿数目;θ=0°时空间啮合线齿轮为平行轴的内啮合方式,能进一步减小线齿轮组的体积。
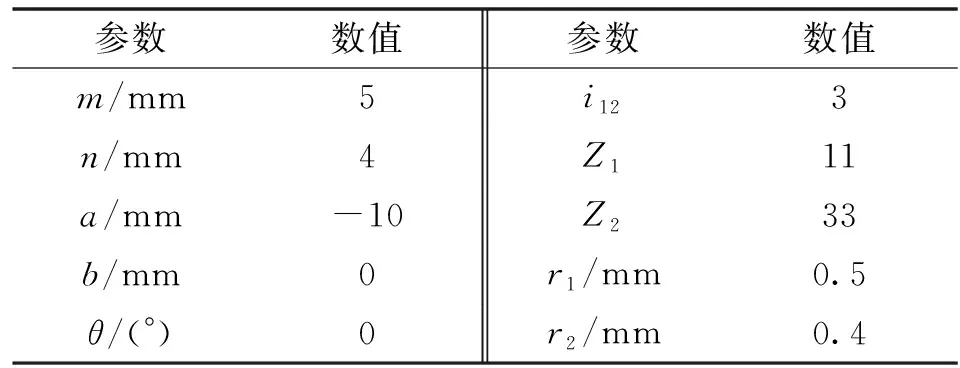
表1 螺旋曲线啮合齿轮参数Tab.1 Parameters of helical curve meshed gear
当减少所设计的主动线齿轮的线齿个数时,线齿轮即能实现间歇传动,如图3(a)所示。结合从动轮,最终得到不完全线齿轮组如图3(b)所示。

图3 不完全线齿轮
1.2 跳跃执行部分设计
跳跃机构的执行部分负责完成机构的跳跃运动。表2列出了4种常见生物的跳跃能力[15],为使跳跃机构获得更好的跳跃能力,并具有较小的体积,选取蝗虫作为仿生对象。
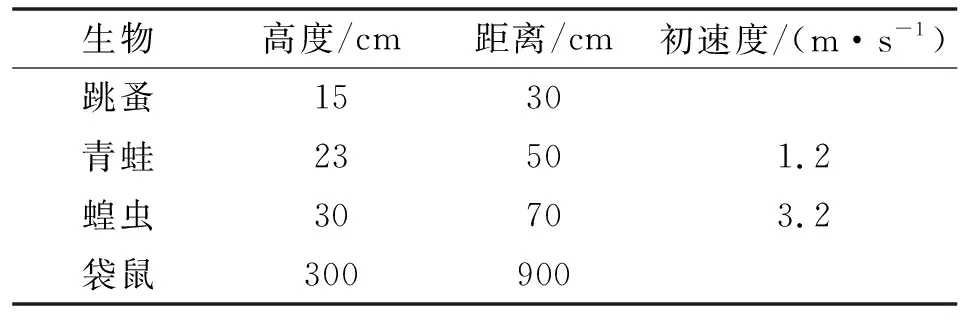
表2 4种常见生物的跳跃能力[15]Tab.2 Jump ability of four kinds of common creatures[15]
图4展示了蝗虫的后腿生理结构[16]。蝗虫的胫节伸肌与胫节屈肌是蝗虫实现跳跃运动的重要保障,当蝗虫后腿需要进行收缩或伸展的动作,胫节伸肌与胫节屈肌会拉动胫节,并以关节为支撑点,实现后腿转动;蝗虫的肌腱主要负责传导动力。

图4 蝗虫后腿内部生理结构[16]Fig.4 Internal physiological structure of locust hind leg[16]
跳跃执行部分如图5所示,其中连杆1模拟蝗虫后腿的腿节,连杆4模拟其胫节,连杆5模拟其肌腱,弹簧模拟后腿肌肉。图5(a)表示跳跃机构积蓄跳跃所需要能量时的状态,当滑块沿连杆1向左滑动,弹簧被拉伸并积蓄弹性势能,同时连杆5带动连杆4绕着转动副B转动,模拟了蝗虫后腿收缩积蓄能量时的准备起跳过程;图5(b)表示该跳跃机构能量释放完毕后,弹簧恢复原长,带动滑块往右移动,从而通过连杆5推动连杆4绕转动副B转动,模拟了蝗虫跳跃时后腿的伸展过程。

图5 跳跃机构储能(a)及跳跃阶段(b)简图
1.3 跳跃机构的整体运动
跳跃机构整体工作过程如图6所示。
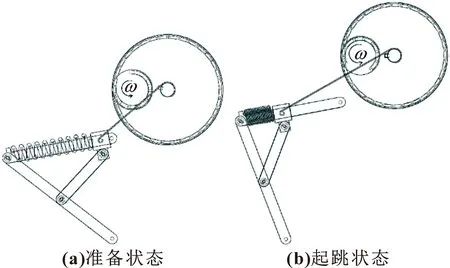
图6 跳跃机构的工作过程
其中,准备状态如图6(a)所示,不完全主动线齿轮通过电机驱动开始与从动线齿轮啮合,腱状线逐渐缠绕在转轴上,并拉动滑块沿连杆1向右移动,使弹簧逐渐伸长并达到伸长最大值,连杆5带动连杆4收缩,弹簧积蓄弹性势能;起跳状态如图6(b)所示,不完全主动线齿轮脱离啮合,弹簧从最大伸长的状态开始收缩,腱状线放卷,拉动滑块沿连杆1向左移动,弹簧积蓄的弹性势能转化为动能,模拟了蝗虫后腿下蹬的起跳运动。重复这两个过程,就能实现跳跃机构的间歇跳跃。
2 跳跃机构仿真分析
如图7所示,在ADAMS中对跳跃机构进行垂直方向跳跃仿真分析。各构件尺寸及材料如表3所示。
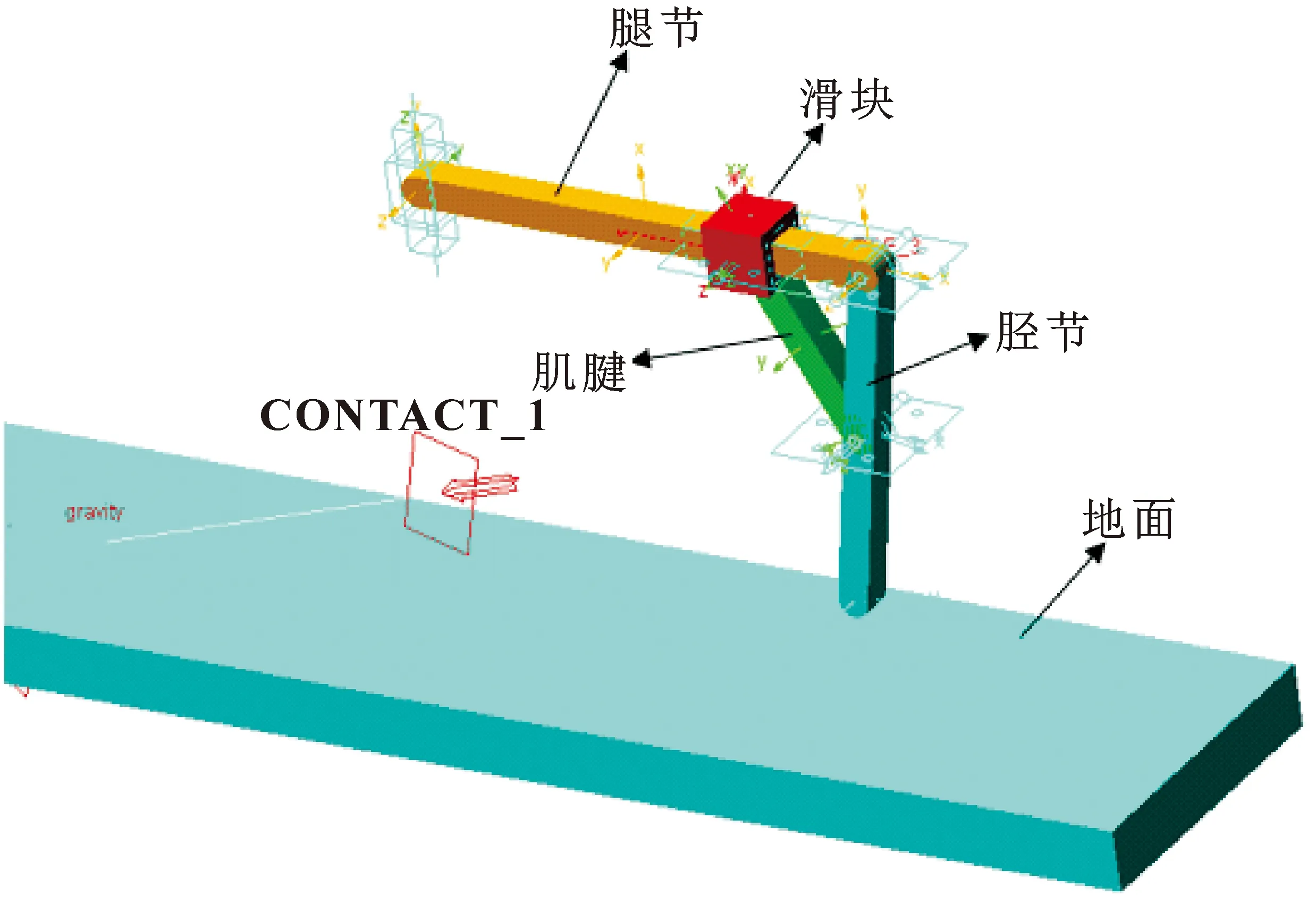
图7 跳跃机构的仿真模型Fig.7 Simulation model of the jump mechanism

表3 跳跃机构主要参数Tab.3 Main parameters of the jump mechanism
2.1 跳跃机构质心位移及速度分析
跳跃机构的各构件,包括腿节、胫节、肌腱在竖直方向上质心的位移变化如图8所示。初始时给予跳跃机构一定高度,因此从跳跃机构初次回落地后开始分析。在t=0.45 s时,跳跃机构第一次落地,并准备第二次起跳,跳跃机构开始收缩蓄能,各构件的质心下降;在t=0.60~0.76 s时,跳跃机构高度不断增加,并且在t=0.76 s时到达最高点,最大垂直跳跃高度达到124.86 mm,证明机构具有良好的跳跃性能。

图8 跳跃机构跳跃过程中各构件的质心位移变化
跳跃过程中,跳跃机构各构件的质心速度变化如图9所示。以第二次跳跃为例,在起跳阶段,各构件的质心速度变化较小;在t=0.51 s,跳跃机构开始蓄能,各构件的质心速度增大,并在t=0.58 s达到蓄能阶段的最大值;在t=0.63 s时,跳跃机构起跳的瞬间,各构件的质心速度达到整个跳跃阶段的最大值,速度分别为:腿节1.55 m/s、肌腱1.16 m/s、腿节0.77 m/s,各项数值均接近蝗虫实际起跳速度。
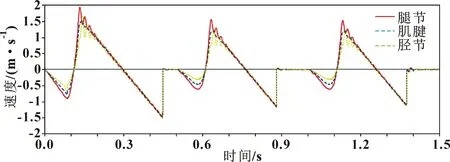
图9 跳跃机构跳跃过程中各构件的质心速度变化
2.2 储能弹簧的仿真分析
设计的跳跃机构以弹簧作为蓄能装置。弹簧的变形量、弹力的变化分别如图10与图11所示。以第二次跳跃过程为例,t=0.45~0.51 s时弹簧处于静止状态,当弹簧开始被拉伸进行蓄能,一直到t=0.61 s弹簧蓄能达到最大值,此时弹簧的变形量最大,最大弹力为87.6 N。
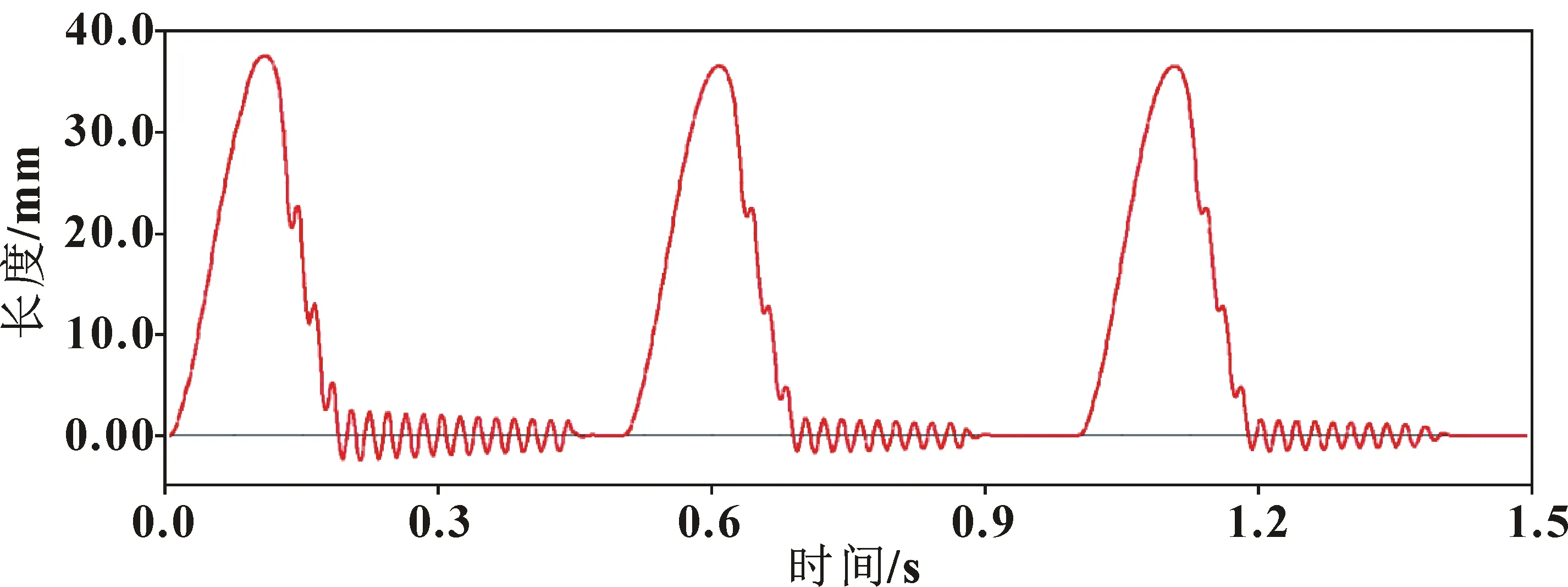
图10 弹簧变形量变化曲线Fig.10 Change of spring deformation
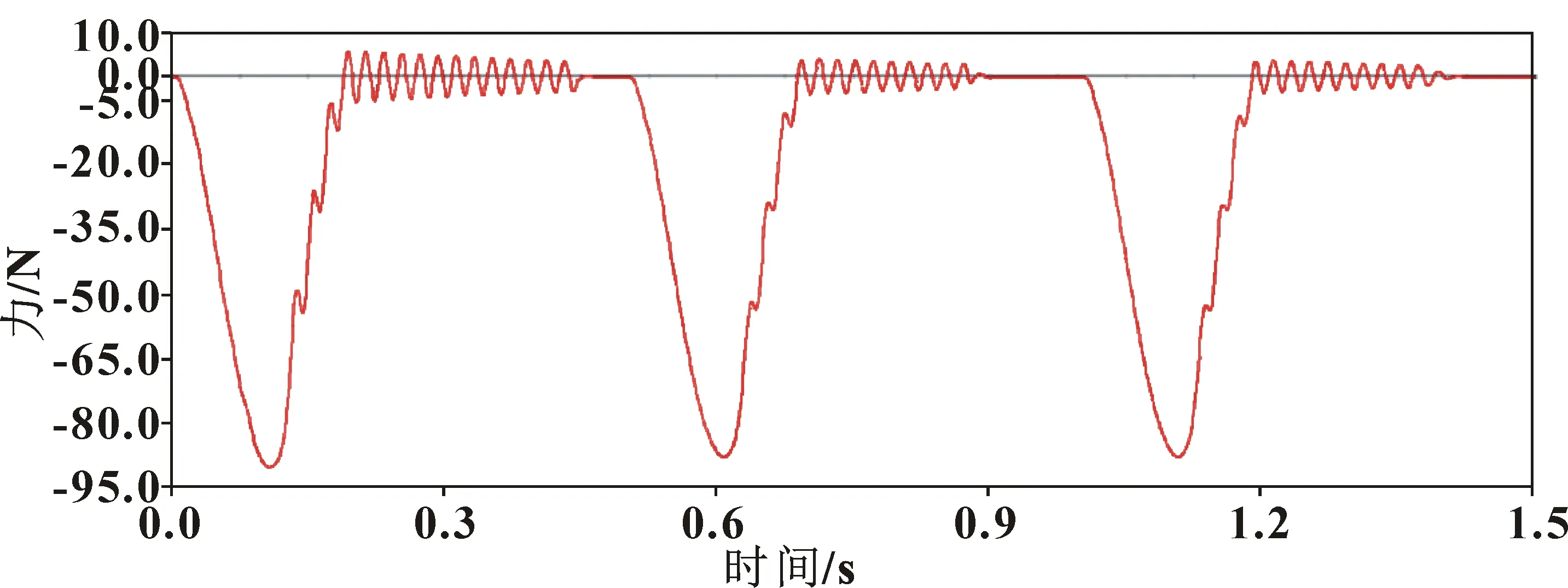
图11 弹簧弹力变化曲线Fig.11 Change of spring elasticity
弹簧弹性系数大小会影响跳跃机构的最大跳跃高度。为探究弹簧弹性系数对最大跳跃高度的影响,在其他条件保持不变的情况下,仅改变蓄能弹簧的弹性系数后进行仿真,观察弹性系数的大小与跳跃机构的关系。表4展示了选择不同弹性系数的弹簧时,跳跃机构的腿节在跳跃过程中的跳跃高度与竖直方向上的质心速度。可以看出,在其他条件一定的情况下,跳跃机构的跳跃高度起初随着弹簧弹性系数增加而增高,在弹性系数为2.4 N/mm时获得最大跳跃高度,之后跳跃高度又随弹性系数增加而明显下降。
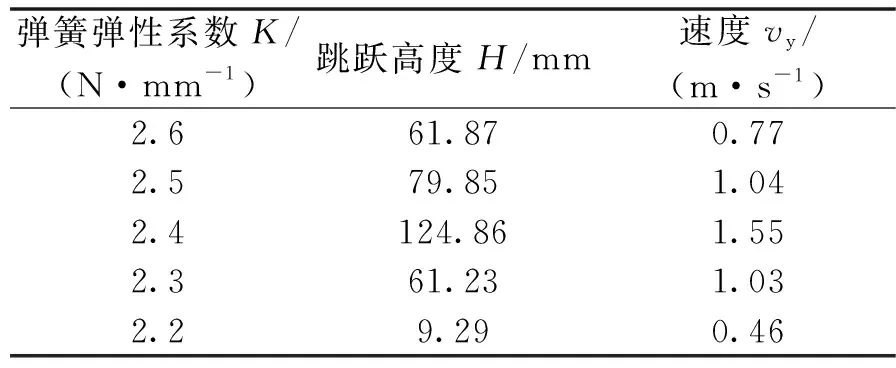
表4 不同弹性系数弹簧对跳跃机构的性能影响
2.3 腿节与胫节之间的夹角变化
跳跃机构中,腿节与胫节的夹角也可能影响机构的跳跃能力,该夹角的变化能够直观反映跳跃机构在跳跃过程中的运动过程。腿节与胫节夹角变化如图12所示。可以发现:腿节与胫节之间的夹角变化具有周期性。跳跃机构腿节与胫节第一次蓄能达到最大时的夹角为14.7°,第二次和第三次的夹角都为18.5°,说明跳跃机构工作稳定;同时跳跃机构蓄能时腿节与胫节的夹角存在一个最小值,该值的大小可能会影响跳跃机构的跳跃能力。

图12 腿节与胫节夹角变化曲线Fig.12 Change of intersection angle between femora and tibia
3 结论
(1)设计了一种基于不完全线齿轮传动的仿蝗虫跳跃机构。不完全线齿轮的传动为跳跃机构提供了周期性的间歇运动,并能有效减小跳跃机构的体积及质量,有助于提升机构跳跃能力;仿蝗虫后腿的跳跃执行部分具有良好跳跃能力,结构简单,降低了跳跃机构的复杂性。
(2)仿真结果表明:设计的跳跃机构具有可行性,且跳跃机构具有较好的跳跃能力,最大垂直跳跃高度能达到124.86 mm。
(3)跳跃机构的跳跃能力与所用储能弹簧的弹性系数有关,跳跃能力随弹性系数的增大先提升后降低;此外发现跳跃机构的跳跃能力也可能与腿节与胫节之间的夹角有关。
猜你喜欢
小哥白尼(野生动物)(2022年5期)2022-08-15
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
科学大众(2020年10期)2020-07-24
故事作文·低年级(2019年6期)2019-06-20
幼儿教育·父母孩子版(2017年10期)2017-12-13
课外生活(小学1-3年级)(2017年4期)2017-05-22
应用科技(2015年5期)2015-12-09
中国卫生(2015年6期)2015-11-08
中国卫生(2014年11期)2014-11-12
