
微重力模拟装置中悬吊弹簧局部模态动力学建模与试验研究
2023-02-27 13:14杨鸿杰
振动与冲击 2023年4期
马 超,刘 磊,杨鸿杰
(1. 西北工业大学 航天学院,西安 710072; 2. 陕西省空天飞行器设计重点实验室,西安 710072)
空间微振动隔离技术已经成功用于空间站以及空间高分辨率遥感卫星。微振动隔振器可以解决空间精密载荷对微振动的抑制与隔离问题,从而满足精密载荷对微重力加速度水平的要求[1]。模拟空间微重力环境进行地面试验是验证隔振器能否在轨可靠工作的重要措施之一。目前进行微重力模拟[2]的主要方法有:水浮法[3]、气浮法[4-5]、落塔法[6]、抛物线飞行法[7]以及悬吊法[8]等,其中落塔法进行微重力模拟的精度能够达到10-4g~10-5g,然而受到落塔高度的限制,进行地面试验的时间很难超过10 s。抛物线飞行法为部分自由落体方式,微重力模拟的精度能够达到10-2g~10-3g,该方法能够将试验时间提高到20~30 s。然而落塔法和抛物线飞行法进行地面试验的成本较高,时间较短,使得对于微振动隔振器的各种性能指标无法较好的考核,在地面微重力模拟试验应用方面受到很大限制。水浮法利用水的浮力模拟微重力环境,模拟的时长以及尺寸不受限,然而对于带电设备,需要考虑水阻和密封,很大程度限制了地面试验的应用。气浮法利用气体的推力实现微重力模拟,实现简单,力可调,然而时长和载荷质量受限,考虑到气瓶的容量要进行长时间地面试验只能允许较小的载荷,并且气浮法会产生较大的噪声,对微振动隔振器的隔振性能产生一定的影响。悬吊法因其原理简单,制造方便,微重力模拟时间长等优点在微重力模拟技术中被广泛应用[9-11]。
美国的专家学者从20世纪70年代就开始将固定长度悬吊法用于航天员的微重力模拟,NASA[12-13]采用多根固定长度的吊索对航天员身体多个部位进行悬吊,模拟月球微重力下走、跑和跳。刘荣强等[14]使用固定长度的吊索为空间索杆铰接式伸展臂设计了一套重力平衡装置,对伸展臂展开和收拢进行了零重力地面模拟试验。这种方法构型简单,适用于运动自由度少,运动形式简单,几乎无竖直位移的情况。然而吊索长度不可调节或不可在线调节,造成竖直力不可调节,因此适用范围小,微振动模拟精度低。卡耐基梅隆大学的Brown等[15]在1994年提出一种利用吊索配重克服重力来模拟太空低重力环境的方法,并且可在地面实现三维空间的运动。彭浩等[16]采用吊丝配重悬吊法通过一圈带有配重的吊丝成功对环形天线进行重力补偿。配重式悬吊法实现简单,适用于运动自由度少,竖直位移小,竖直加速度小的微低重力模拟,当悬吊绳慢速移动时补偿效果较好。然而快速移动时配重的惯量严重影响拉力精度。为了解决配重悬吊的问题,弹簧悬吊开始被大量研究,Pyatibratov等[17]利用弹簧悬吊法对零重力和低重力条件下的模拟器进行研制,用于航天员在月球和火星空间的低重力训练。Liu等[18]采用扭杆和弹簧的组合形式对刚度进行调整,使整个机构的刚度较低,并使用鲁棒控制进行了高精度低重力悬浮模拟试验。文献[19]通过四个悬吊点实现悬挂,每个悬吊点包括两个呈V形安装的螺旋弹簧和两个用于低频定位的位置传感器组成,通过弹簧可以实现低频悬吊。然而以上研究都只关注了如何获得刚度低的特性,而没有考虑弹簧自身模态振动对载荷的影响。
悬吊弹簧为质量不可忽略的长弹簧,描述有质量弹簧动力学特性的模型包括离散模型和连续模型,离散模型是将悬吊弹簧离散成一系列小的弹簧振子进行分析。通过有限个小的弹簧振子来对整个弹簧的性能进行近似时会引入系统误差,不能准确描述悬吊弹簧的动力学特性。为了提高悬吊弹簧动力学模型的准确性,本文采用连续模型对悬吊弹簧进行动力学建模,搭建了一种微重力模拟装置,对所建立的动力学模型进行试验验证。
为了降低隔振器在微重力模拟过程中悬吊弹簧局部模态振动对隔振器的干扰,通过PVC胶与悬吊弹簧并联的方式增加弹簧的模态阻尼,利用连续模型对加胶带悬吊弹簧进行动力学建模,并开展了被动和主动隔振试验。试验结果显示PVC胶带可以减小悬吊弹簧局部模态处的振动幅值,缓解对隔振器控制性能的限制,更准确的反应在轨工作状态。
1 微重力模拟装置理论分析
使用悬吊方法对隔振器进行微重力模拟的总体方案如图1所示,微重力模拟装置由悬吊架、悬吊弹簧、PVC阻尼胶带、悬吊绳以及辅助机构组成。悬吊架布置在试验台两侧,由长2 m,宽2 m,高3 m的可拆卸铝型材搭建,起到支撑的作用;悬吊绳通过滑轮缠绕在绞盘上,用于升降悬吊弹簧;PVC胶带与悬吊弹簧并联后直接与隔振上平台相连,用于微重力模拟;辅助机构包括绞盘和滑轮装置。隔振下平台固连在试验台上,隔振上平台与下平台通过支撑弹簧连接在一起。由于在地面受重力影响隔振上平台会一直压缩支撑弹簧,悬吊弹簧进行拉伸时会产生向上的拉力,当悬吊弹簧提供的拉力与隔振上平台的重力平衡,使得支撑弹簧保持在原长的状态,此时隔振器完成微重力模拟。
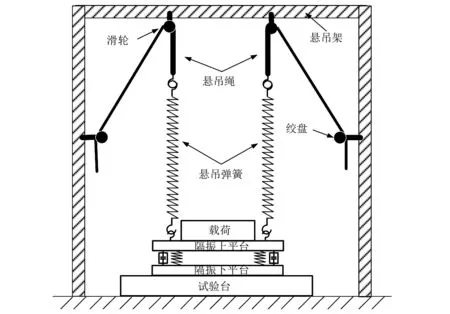
图1 微重力模拟装置总体方案Fig.1 The overall scheme of microgravity simulation device
为了满足空间精密载荷对空间微重力环境的要求,隔振器在1 Hz~100 Hz需要将空间站mg量级的环境振动降低到μg量级。因此悬吊架在竖直方向设计基频高于100 Hz,从而降低悬吊架对隔振器隔振性能的影响。为了达到以上要求,悬吊架采用横截面积100×100高刚度可拆卸铝型材作为支撑结构进行搭建,增加了微重力模拟装置的刚度。在每个竖直梁的底面连接一块底板,每个竖直梁与横梁以及与底板之间均用斜梁进行加固,底板采用不锈钢,保证悬吊架具有较高的稳定性和较高竖向的基频。悬吊架设计模型如图2所示。

图2 悬吊架模型Fig.2 Hanging shelf model
悬吊弹簧为质量不可忽略的长弹簧,阻尼较小,在对隔振器进行微重力模拟时,悬吊弹簧在局部模态处的振动会引入到隔振上平台,这种模态振动被加速度传感器测量后进入主动控制回路,容易导致隔振控制失稳,对隔振器的隔振性能产生影响,并且这种状态与在轨状态不符。
悬吊弹簧与隔振器内部弹簧为并联关系,悬吊弹簧和隔振器内部弹簧的关系见式(1),悬吊弹簧和隔振器内部弹簧的连接示意如图3所示。
kz=k+kt
(1)
式中:kz为悬吊弹簧和隔振器内部弹簧的总刚度;k为悬吊弹簧的刚度;kt为隔振器内部弹簧的刚度。

图3 悬吊弹簧和隔振器内部弹簧的连接示意图Fig.3 Schematic diagram of connection between suspension spring and internal spring of vibration isolator
由式(1)可以看出,悬吊弹簧的刚度越大,总刚度中悬吊弹簧占有的刚度越大,因此悬吊弹簧引入到隔振器的基频就越大。为了避免悬吊弹簧在1 Hz~100 Hz与隔振器产生共振,悬吊弹簧的基频应低于1 Hz。受到实验室高度限制悬吊架总高度为3 m,试验台高度为0.8 m,因此悬吊弹簧工作状态总高度应小于2.2 m,设计悬吊弹簧的刚度k=0.08 N/mm,悬吊弹簧的基频为0.83 Hz,小于设计值1 Hz的要求。隔振器内部弹簧的刚度kt=7.20 N/mm,因此隔振器的基频为7.86 Hz,悬吊弹簧与隔振器整体的基频为7.91 Hz。悬吊弹簧的设计参数如表1所示。

表1 悬吊弹簧的设计参数Tab.1 Design parameters of suspension spring
2 悬吊弹簧的动力学建模
微重力模拟装置主要包括悬吊架、四根悬吊绳以及四根悬吊弹簧。四根完全相同的悬吊弹簧以并联的方式连接,在形变量相同的情况下四根悬吊弹簧的刚度可以等效成一根主弹簧的刚度,主弹簧的刚度为四根悬吊弹簧刚度之和。悬吊弹簧连接在悬吊架上可以理解为悬吊弹簧一端固支。将悬吊弹簧看做均匀的连续介质,一端固定;另一端系一质量为M的弹簧振子系统,等效模型如图4所示。

图4 悬吊弹簧的等效模型Fig.4 Equivalent model of suspension spring
弹簧的刚度为k,长为L,质量为m,阻尼为C1。在t时刻离固定端距离为x点处的弹簧位移量为u(x,t)。观察其中原长为dx的一小段弹簧,假设在某一时刻t整个弹簧处于拉伸状态,则这一小段弹簧的刚度为kL/dx,形变是du,受到的拉力为Fk=kLdu/dx=kLux。这一小段弹簧的阻尼为c1dx/L,弹簧受到的阻尼力为Fc=(c1/L)dx·du/dt,这一小段弹簧的质量为mdx/L,加速度为utt,则可以导出弹簧的波动方程为
(2)
为了减小悬吊弹簧对隔振器的影响,通过在悬吊弹簧外部粘贴一层PVC胶带的方式增加悬吊弹簧阻尼,从而减小弹簧在局部模态的振动,减小对隔振平台的影响。
PVC胶带属于黏弹性材料,兼具黏性和弹性的性质。在外力作用下,其应力大小既依赖于应变也依赖于应变速率,其力学行为介于理想弹性体(弹簧)和理想黏性体(黏壶)之间。当受到外力作用时,类似于弹簧和黏壶共同来应对外力的作用,当外力消失后,弹簧会恢复到原来的状态,而黏壶无法恢复到原来的状态,从而耗散了振动能量,起到阻尼作用。采用弹簧与黏壶并联的Kelvin模型对PVC胶带的黏弹性阻尼进行建模,PVC胶带与悬吊弹簧通过并联方式连接。PVC胶带与悬吊弹簧的模型如图5所示。

图5 PVC胶带与悬吊弹簧的等效模型Fig.5 Equivalent model of PVC tape and suspension spring
胶带的刚度为kl,阻尼为C2。观察其中原长为dx的一小段弹簧和一小段胶带,设在某一时刻t整个弹簧和胶带处于拉伸状态,则这一小段弹簧受到的拉力为Fk=(k+kl)Ldu/dx=(k+kl)Lux。这一小段胶带的阻尼为c2dx/L,弹簧受到的阻尼力为Fc=[(c1+c2)/L]dx·du/dt,在式(2)的基础上弹簧加胶带的波动方程为
(3)
隔振上平台和载荷的质量为M,悬吊弹簧上端固定,下端与隔振上平台相连,则边界条件可表示为
(4)
t=0时悬吊弹簧被隔振上平台拉伸位移u0,此时悬吊弹簧处于静止状态。
则初始条件可表示为
(5)
令u(x,t)=X(x)T(t)代入式(4)和式(5)并分离变量,得
(6)
(7)
(8)
式中:ωn为无阻尼弹簧的频率;ωd为有阻尼弹簧的频率;ε为有阻尼弹簧的阻尼比;φ为弹簧有阻尼振动的相位。
(9)
且可以得到
(10)
ytany=β
(11)
解此方程可得到弹簧振子的本征频率。以yn表示第n个周期所对应的本征值y,在|y|<π/2内,将tany展开成麦克劳林级数,可得
将tany在区间π/2 (13) 依此方法可求得更高的本征频率ωn。 解出频率ωn代入式(8)中可以得到悬吊弹簧的振动解为 e-εωntsin(ωdt+φ) (15) 隔振上平台(振子)的振动解为 e-εωntsin(ωdt+φ) (16) 由式(15)和式(16)可以看出,悬吊弹簧的振动频率与隔振上平台的振动频率相同,说明微重力模拟装置中悬吊弹簧的振动会引入到隔振上平台,从而对隔振器产生影响。 隔振上平台的振动振幅为 (17) 式中,ε为有阻尼弹簧的阻尼比,由式(17)可以看出,阻尼越大隔振上平台的振动振幅越小,增加阻尼会减小隔振上平台的振动。 悬吊弹簧为刚性弹簧,阻尼比在0.001~0.005内,阻尼与阻尼比的关系为 (18) 式中,ε1为悬吊弹簧的阻尼比。根据式(18),悬吊弹簧计算阻尼在0.014~0.068内。 (19) 式中:E为胶带的等效弹性模量;B为胶带的宽度;L为胶带的长度;τ为流变系数。 胶带的性能参数如表2所示。 表2 PVC胶带的性能参数Tab.2 Performance parameters of PVC tape 经过计算,胶带的阻尼为0.510,悬吊弹簧加胶带后阻尼增加到0.524以上,加胶带后整体阻尼可以提高8.5倍以上。由此说明加胶带可以减小隔振上平台的振动,从而减小微重力模拟装置中悬吊弹簧对隔振器的影响。 为了验证悬吊弹簧局部模态处的振动对隔振上平台的影响,本文搭建了地面试验验证系统。地面试验验证系统包括试验台、微重力模拟装置以及单自由度隔振器。地面试验验证系统如图6所示。 图6 地面试验验证系统Fig.6 The ground experimental system 单自由度隔振器由隔振上平台和下平台通过四个支撑弹簧进行连接,隔振下平台固连在试验台上,隔振上平台与微重力模拟装置相连。加速度传感器采用PCB公司生产的393B05加速度传感器,该传感器能够测量0.2 Hz~1 700 Hz频率范围内的加速度信号,灵敏度为10 V/g,可以采集到隔振上平台μg量级的低幅微振动。加速度信号调理盒能够将加速度测量信号经过信号放大、信号调理以及A/D转换传递给dspace实时控制系统,并传输给主控计算机从而完成低幅微振动的测量。主控计算机可以根据隔振平台采集的加速度信号实现主动隔振。 在悬吊状态下对隔振器进行被动隔振试验。隔振上平台在频域下的加速度响应如图7所示。 图7 隔振上平台振动频率Fig.7 Vibration frequency of upper platforms 由图7可以看出,悬吊弹簧实测第一阶频率为0.75 Hz,第二阶频率实测值为5.85 Hz。加速度响应的最高峰值为7.6 Hz,该频率为悬吊弹簧和隔振器整体的实测基频,悬吊弹簧和隔振器整体基频理论值为7.91 Hz,理论值与实测值的误差为3.9%。 通过式(9)、式(12)~式(14)对悬吊弹簧模态振动频率进行求解,得到弹簧模态振动频率的理论值。将悬吊弹簧模态振动频率理论值与实测值(见图7)进行对比,见表3所示。 优点:延续并兼容PTN技术,依托以太网产业链低成本优 势。基于以太网的FlexE轻量级增强,简单易实现。 表3 悬吊弹簧振动理论值与实测值的对比Tab.3 Comparison between theoretical and measured vibration values of suspension spring 从表3可以看出,悬吊弹簧的理论基频为0.83 Hz,与实测第一阶频率误差为9.6%。悬吊弹簧的第二阶频率理论值5.95 Hz与实测值的误差为1.21%。悬吊弹簧振动频率的理论值与实测值除了第一阶频率误差为9.64%,其他阶频率误差在4%以内,说明悬吊弹簧局部模态处的振动引入到隔振上平台,验证了微重力模拟装置中悬吊弹簧动力学模型的正确性。 为了减小悬吊弹簧局部模态处的振动对隔振器性能的影响,使微重力模拟装置更接近在轨状态,在悬吊弹簧侧面以粘贴胶带的方式增加弹簧的阻尼,PVC胶带与悬吊弹簧的安装方式如图8所示。 图8 PVC胶带与悬吊弹簧的安装方式Fig.8 Installation of PVC tape and suspension spring 对四根悬吊弹簧粘贴胶带前后进行隔振试验,通过被动隔振后上平台加速度频域对比如图9所示。 图9 悬吊弹簧有无胶带被动隔振后上平台加速度对比图Fig.9 Comparison diagram of acceleration of upper platform after passive vibration isolation of suspension spring with or without tape 由图9可以看出,悬吊弹簧没有加胶带进行被动隔振试验时,悬吊弹簧在1 Hz~100 Hz的频段内会将自身的局部模态引入到隔振上平台,在5.85 Hz,12.16 Hz,18.15 Hz,24.23 Hz,42.35 Hz处的振动均超过隔振要求的1 μg,加上胶带后隔振上平台1 Hz~100 Hz频段内由悬吊弹簧引入的振动幅值均小于1 μg,说明在悬吊弹簧外部加胶带可以增加弹簧的阻尼,并且可以减小悬吊弹簧引入到隔振上平台的振动,从而减小微重力模拟装置中悬吊弹簧对隔振器的影响。 为了验证悬吊弹簧局部模态处的振动对主动隔振的影响,在微重力模拟状态下对隔振器进行主动隔振试验。主动隔振采用PID控制,当增益升高到100时,控制器失稳,音圈作动器出现严重漂移。通过主动隔振后上下平台加速度在频域上的对比如图10所示。 图10 上下平台加速度在频域下的对比Fig.10 Comparison of acceleration of upper and lower platforms in frequency domain 由图10可看出,对隔振器进行主动隔振后,由悬吊弹簧局部模态(5.81 Hz,12.14 Hz,54.52 Hz,60.09 Hz)引入到隔振上平台的振动无法被隔离到1 μg以下,使得主动隔振无法满足性能要求。说明悬吊弹簧局部模态的振动会影响到隔振器的性能。 通过以上试验可以说明,悬吊弹簧局部模态的振动已经引入到隔振上平台,这种模态振动被加速度传感器测量后进入主动控制回路,导致隔振控制失稳。 对四根悬吊弹簧粘贴胶带后进行主动隔振试验,主动隔振采用PID控制,增益升高到205时,控制器失稳,相对于悬吊弹簧无胶带的微重力模拟装置,增益提高了一倍。通过主动隔振后上下平台加速度在频域上的对比如图11所示。 图11 上下平台加速度在频域下的对比Fig.11 Comparison of acceleration of upper and lower platforms in frequency domain 由于48.8 Hz为试验台的基频,通过隔振器引入到隔振上平台,因此与悬吊弹簧没有关系。从图11可以看出,在对隔振器进行主动隔振后,微重力模拟装置中的悬吊弹簧加胶带后引入到隔振上平台的振动均降低到1 μg以下,说明加胶带可以降低悬吊弹簧局部模态处的振动,减小对隔振器主动隔振性能的影响。 通过以上试验可以说明,在悬吊弹簧侧面粘贴PVC胶带可以起到增加阻尼的效果,降低了悬吊弹簧局部模态处的振动,从而有效缓解了模态振动对主动隔振控制器控制性能的限制,这种状态更加接近在轨状态。 在利用悬吊法对隔振器进行微重力模拟时,悬吊弹簧局部模态处的振动很容易引入隔振上平台,限制隔振控制性能,并且与在轨状态不符。本文利用连续模型对悬吊弹簧和PVC胶带进行动力学建模并对纯弹簧和加胶带弹簧的阻尼进行对比,从而对加胶带悬吊弹簧的模态振动和阻尼进行深入研究,通过被动和主动隔振试验对所建立的动力学模型进行了试验验证,研究了加胶带悬吊弹簧对隔振器隔振性能的影响,从而得到以下结论: (1)通过连续模型进行动力学建模能够准确描述微重力模拟装置中悬吊弹簧加胶带的动力学特性。 (2)悬吊弹簧局部模态处的振动会引入到隔振上平台,通过被动和主动隔振都无法隔离,这种状态与在轨状态不符。采用PVC胶带可以起到增加阻尼的效果,这种方法能够将弹簧的模态振动降低到1 μg以下,从而减小模态振动对被动隔振的影响,并有效缓解了模态振动对主动隔振控制器控制性能的限制,这种状态能够更准确的反应在轨工作状态。



3 微重力模拟装置的试验验证







4 结 论
猜你喜欢
中国人民公安大学学报(自然科学版)(2022年1期)2022-07-20
新疆大学学报(自然科学版)(中英文)(2022年2期)2022-03-27
数学物理学报(2021年3期)2021-07-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
数学物理学报(2021年2期)2021-06-09
山东交通科技(2020年2期)2020-08-13
学苑创造·B版(2019年8期)2019-08-09
北方工业大学学报(2019年5期)2019-03-30
童话世界(2018年20期)2018-08-06
电子制作(2017年20期)2017-04-26
