街道植物空间对步行愉悦度的影响
2023-02-27 08:32:44董贺轩高翔
风景园林 2023年1期
董贺轩 高翔
20世纪80年代,世界卫生组织(World Health Organization, WHO)提出了健康城市的概念,中国自20世纪90年代开始建设健康城市[1],健康街道的建设也随之兴起。中国居民人均每日步数居世界第一[2],同时步行属于“绿色低碳”的出行方式,步行环境品质日益成为健康街道建设的重要方面。街道环境的改善可以对步行活动起到促进作用[3-4],其建设视角应从“以车为本”向“以人为本”转变,基于“以人为本”的原则,满足步行者的需求[5]。愉悦度作为情绪维度之一,可以描述步行者的心理感受,步行愉悦度可以反映街道步行友好性及城市建设的水平。但是,城市街道建设大多偏重景观环境的美观性及装饰作用,忽视步行空间和绿色环境的协调规划。街道环境已不能有效满足人们步行活动的心理需求,街道景观需要向步行友好性发展[6]。植物是街道景观的主导要素,可以在街道公共空间、构筑物、建筑等各种人工景观之间起到“软”连接的作用,是街道步行空间的重要构成成分[7],对街道的美观程度、生态水平有重要影响,是必需的街道景观工程材料。通过优化街道植物空间提升步行愉悦度,可以有效促进健康街道建设。
近年来,植物的空间构成作用受到国内重视,对植物的认识逐步从植物本体层面上升到空间层面。一方面,相关学者对植物空间进行量化描述与测定,通过测定植物空间的盖度、形状指数、高度、空间面积、植物多样性等[8-9]量化指标,描述其空间结构、基本空间类型、空间形态[10];并进一步扩展到街道植物空间,评定街道的绿视率[11-13]、树木覆盖率[14-15]、斑块密度、树高、边缘密度、总绿地空间面积、聚集指数[16]、绿视率[17-18]、树种多样性[19-20]等指标。另一方面,在描述植物空间的基础上,相关学者开始探索植物空间与人感受之间的关联,如人群心理满足感[21]、安全感[22]、疗愈性[23]、幸福感[24-25]、心理偏好[26]等。同时,随着对情绪研究的不断深入,国外学者提出了多种较为全面且明确的维度来描述情绪及愉悦度[27-29],相关学者对评价步行者体验的街道步行空间要素进行了探索:Alfonzo提出了包括易达性、可达性、安全性、舒适性、愉悦度的步行需求层级理论[30];Mehta强调了在安全性和舒适性基础上,愉悦度是人们对于街道的进一步需求之一[31]。
综上所述,现有街道植物空间与愉悦度的研究及街道的评价体系大多针对街道植物或绿地,缺少针对街道植物空间的系统量化研究及专门评价体系,尤其是基于步行者视角,也缺乏对街道植物空间与步行愉悦度的关联研究。鉴于此,本研究利用专家法、判断矩阵法等构建街道植物空间形态与步行愉悦度的特征评价体系;通过图像分割法、栅格法等得到步行者视角下的街道植物空间特征数据,通过实验法、问卷调查法等得到步行愉悦度数据;进而运用相关性分析、逐步回归分析、随机森林法等量化分析街道植物空间对步行愉悦度的影响规律,最终建立基于步行愉悦度的街道植物空间评价体系。
1 街道植物空间与步行愉悦度特征评价体系构建
1.1 街道植物空间形态特征评价体系构建
街道空间由街道界面限定,形成线性围合空间[32]。街道空间分为机动车道、非机动车道、人行道和绿化设施带(图1)。植物空间指以植物为主体要素所形成的空间,由基面、侧面及顶面3类构成面单独或共同组合而成,是具有实在或暗示性的围合空间[10](图2)。基于步行者视角,本研究中的街道植物空间特指街道中步行者进行步行活动时,所处的由街道植物要素界定形成的围合空间,主要空间范围包括3部分:街道中建筑前区与人行道之间的绿化设施带、人行道与非机动车道或机动车道之间的绿化设施带、人行道。其中,建筑前区与人行道之间的绿化设施带在规范中不作硬性要求,所以,根据其有无,街道植物空间可以分为a、b 2种类型(图3)。
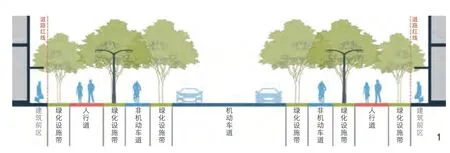
图1 街道空间横断面示意图Schematic diagram of cross section of street space

图2 植物空间的构成面Composition surface of plant space
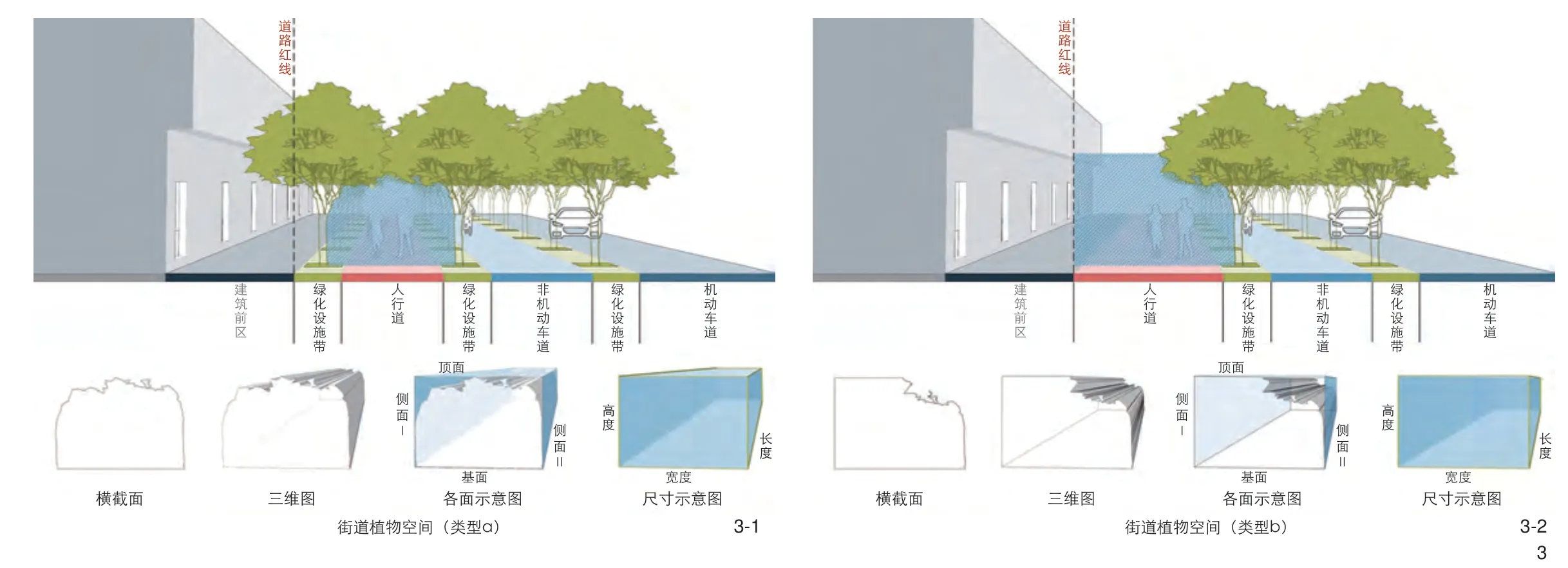
图3 街道植物空间的2种类型Two types of street plant space
基于国内外学者对植物空间与相关空间形态理论的研究[8-26,33-37],通过尺度特征、形状特征、界面特征3个维度,构建街道植物空间形态特征的评价体系(表1):尺度特征指标包括面积(S)和高宽比(D/H),形状特征指标包括形状系数(K),界面特征指标包括侧面Ⅰ通视率(PⅠ)、侧面Ⅱ通视率(PⅡ)、顶面通视率(PT)、绿视率(VG)。
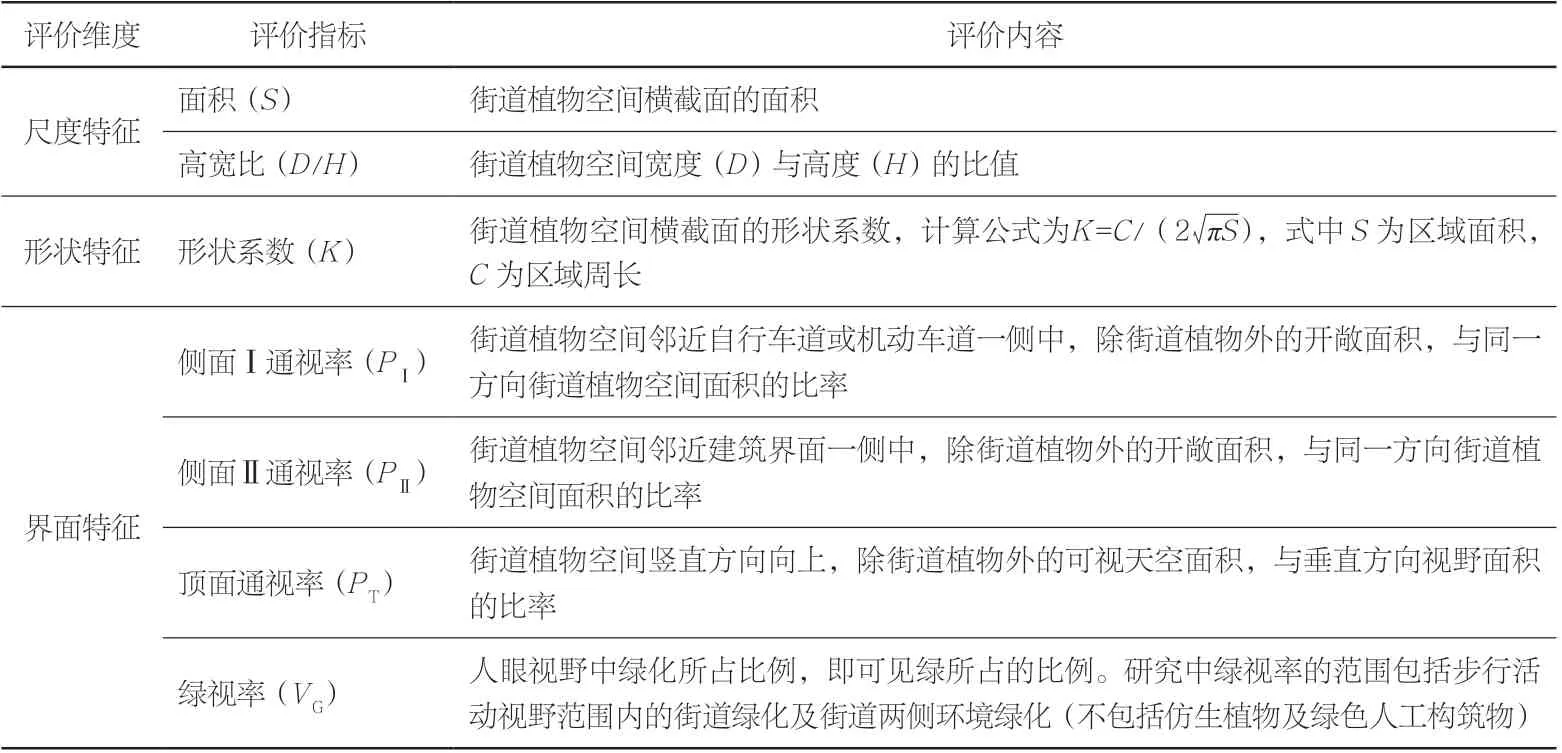
表1 街道植物空间形态特征评价体系Tab.1 Evaluation system for morphological characteristics of street plant space
1.2 步行愉悦度特征评价体系构建
在M-R环境心理模型中[38-39],愉悦度是解释不同环境情绪感知现象的3个维度之一,是情绪感知的重要因子。在本研究中,步行愉悦度指:步行者进行步行活动时,街道植物空间给步行者带来的情绪积极程度,用以评价步行者对街道植物空间的心理感受。
基于国内外学者对愉悦度评价的相关研究[27-31],并结合步行者的体验视角,初步筛选出15组词来描述步行愉悦度的感受:安全-不安、舒适-难受、愉快-不悦、放松-紧张、喜爱-讨厌、有趣-无聊、满意-失望、幸福-孤独、安逸-疲劳、积极-消沉、舒服-别扭、兴奋-沮丧、喜欢-厌烦、振奋-困倦、满足-遗憾。然后通过专家对词语进行进一步筛选(图4),最终得到5组含义相反的形容词来描述愉悦度:安全-不安、舒适-难受、放松-紧张、有趣-无聊、满意-失望,分别对应步行愉悦度的5个影响因素:安全感、舒适度、放松度、吸引力、满意度。
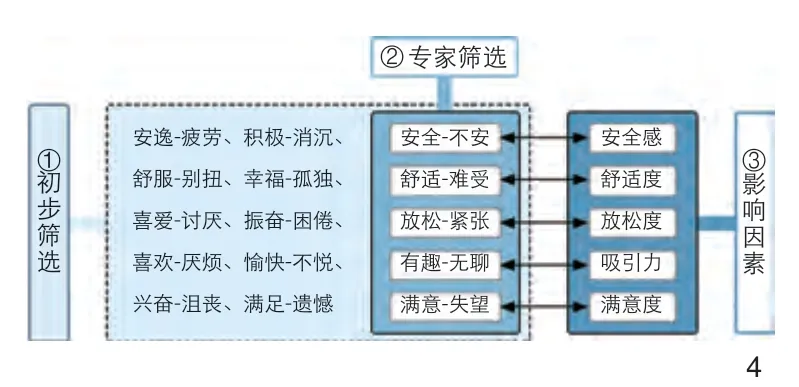
图4 筛选步行愉悦度的影响因素Screening of factors influencing walking pleasure
邀请5位风景园林、城市设计等领域的专家,对步行愉悦度的5个影响因素进行打分,对各影响因素两两之间进行比较并判断其重要程度,生成各专家步行愉悦度影响因素的判断矩阵。同时,分别对判断矩阵进行一致性检查,一致性比例分别为0.031 0、0.025 1、0.059 5、0.009 5、0.071 0,得到的结果满足一致性比率(CR)<0.10[40]。然后将各个专家的打分判断矩阵导入yaahp软件中,选择群决策的平均权重,计算各影响因子权重,结果权重利用几何平均方式进行数据集结,最终得到步行愉悦度特征评价体系:步行满意度>步行放松度>步行舒适度>步行安全感>步行吸引力,权重值分别为0.253 7、0.237 9、0.214 4、0.162 9、0.131 1。
2 街道植物空间对步行愉悦度的影响
2.1 研究设计
2.1.1 研究对象
武汉市是住建部批准的全国城市设计试点城市之一,并于2018、2019年分别制定了《武汉市街道设计导则》[41]和《武汉市街道全要素规划设计导则》[42],以此作为城市街道建设的基本原则。研究基于步行体验者视角,结合武汉市规划图、开源地图(Open Street Map)、百度地图等获取路网基础数据信息,分别截取武汉市内新景路、明玉路、鲁阳西街、步行街南路南段、步行街南路北段、加州阳光美食街、关山大道、雄楚大道、光谷大道9条街道中的9个样本作为研究对象,分别命名为样本1~9(图5)①。样本涵盖了武汉市不同功能类型的街道,具有较强的代表性。

图5 街道样本区位Location of street samples
2.1.2 数据收集及分析方法
1)对所选样本进行现场调研,并采用相机模拟行人视角的方式实地采集街景图像,完成样本植物空间基础信息的采集工作。为保证实验的严谨性及结果的可信度,采样间距设置为10 m,9个样本共391个采样点。每个采样点获取前、左、右3个方向的照片,即平行或垂直于街道②。接着,对每个采样点的3张照片运用PTGui和Photoshop软件进行拼接及处理,生成街道全景照片[43]③。同时,在每个采样点拍摄竖直向上方向的照片,获取天空视野的图像。
2)基于实地调研,通过栅格法[44](图6)④、图像分割法等获取街道植物空间样本的特征数据。受到街道宽度、植物配植方式等的影响,同一样本中可能存在多种类型街道植物空间横截面,需要结合实际情况并运用栅格法对样本中出现的所有类型的横截面进行提取绘制,分别得到每个样本植物空间横截面示意图(图7)。首先通过栅格法提取各样本植物空间横截面,计算植物空间横截面所占网格边界长度及面积,得到样本植物空间的尺度特征及形状特征。接着,运用图像分割法,利用SegNet卷积神经网络进行分析,计算得到样本植物空间的界面特征。侧面Ⅰ通视率、侧面Ⅱ通视率和顶面通视率计算方法为:(1-对应方向街景图片中绿化面积/图片面积)×100%。绿视率的计算方法为:(街道全景照片中绿化面积/图片面积)×100%。3)通过实验法、问卷调查法、访谈法等获取步行愉悦度评价结果数据。根据影响步行愉悦度的安全感、舒适度、放松度、吸引力和满意度,设计调查问卷,并通过现场实验法展开问卷调查,量表问项采用李克特7分制评分法。研究共召集38名志愿者,均为在校大学生,其中26名志愿者有风景园林相关专业背景,其余12名志愿者为其他专业。志愿者分4批到达现场,在9个样本中进行实地的步行体验,并填写街道植物空间步行愉悦度问卷,共收集342份问卷。
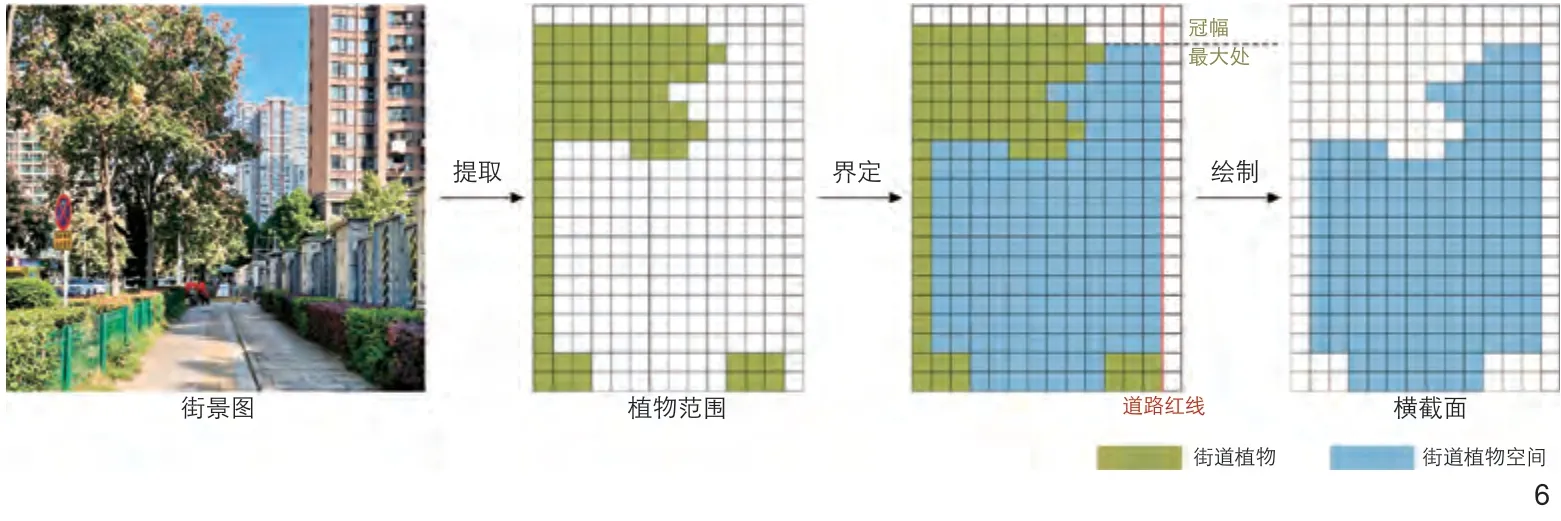
图6 提取街道植物空间横截面Cross section of street plant space extracted
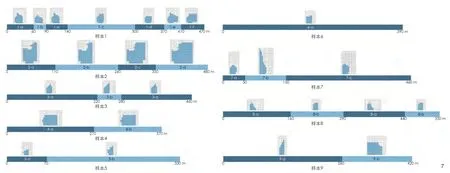
图7 样本植物空间横截面示意图Schematic diagram of cross section of sample plant space
2.2 街道植物空间与步行愉悦度评价
2.2.1 街道植物空间特征评价
通过栅格法、图像分割法等得到样本植物空间特征(表2)。接着,根据各类横截面所占样本长度的比重确定权重,计算各样本街道植物空间的尺度特征和形状特征。同时,运用图像分割法对街道全景照片进行处理,得到各样本街道植物空间的界面特征。结果表明:样本2的面积最大,代表了提供的空间最大;样本4的高宽比最大且大于1,代表了街道植物空间的宽度大于高度;样本2、9的形状系数最大,代表了形状最复杂;样本9的侧面Ⅰ通视率最大且接近1,代表了植物在邻近自行车道或机动车道一侧街道中所占面积较小;样本3、4的侧面Ⅱ通视率最大,代表了植物在邻近建筑界面一侧街道中所占面积较小;样本4的顶面通视率最大且接近1,代表了植物所占顶面面积最小,即可视天空面积最大;样本7的绿视率最大,代表了人视野中可见绿比例最大。
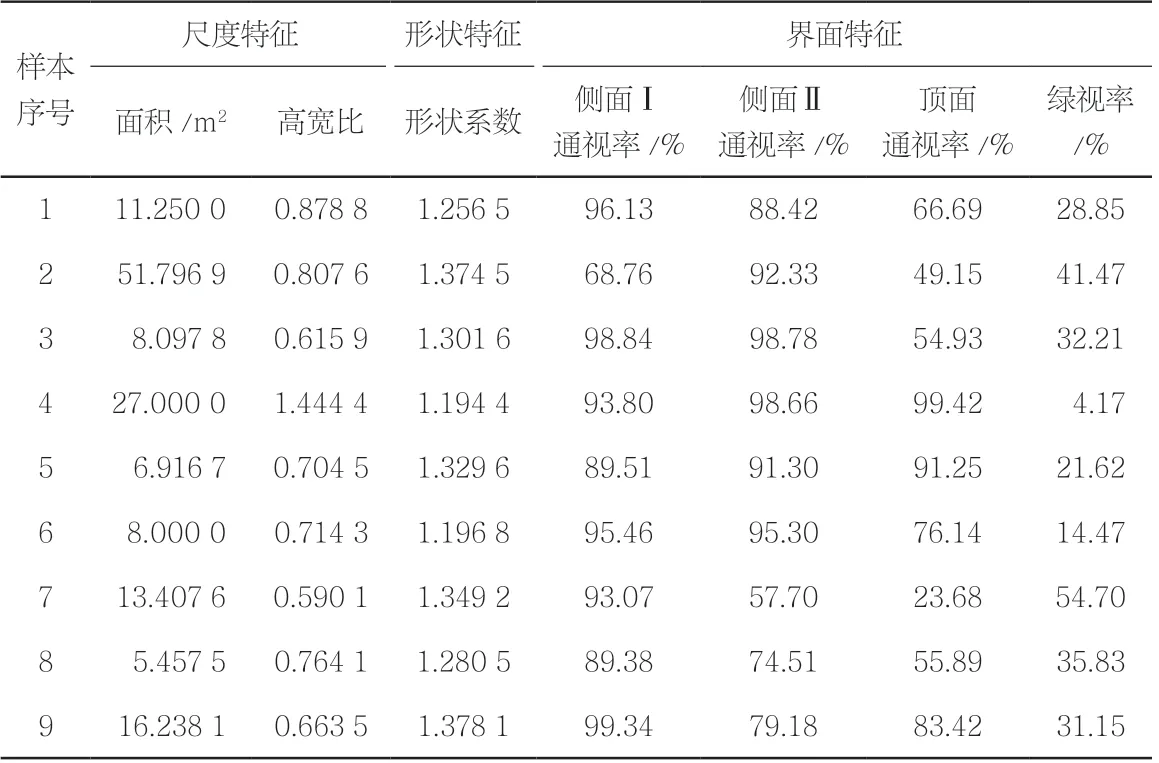
表2 样本植物空间形态特征Tab.2 Morphological characteristics of sample plant space
2.2.2 步行愉悦度特征评价
首先,通过问卷的收集及整理得到对每个样本植物空间步行愉悦度影响因素的评分(图8)。观察图表发现:1)样本2和样本7的步行愉悦度的各影响因素评价都绝对高;2)样本4、样本8和样本9的步行愉悦度的各影响因素评价都绝对低;3)样本1、样本3、样本5和样本6的步行愉悦度的各影响因素评价的结果错综复杂,其中,样本1的放松度、吸引力和满意度均低于平均值,样本3的舒适度低于平均值,样本5的放松度略低于平均值,样本6的吸引力略低于平均值。
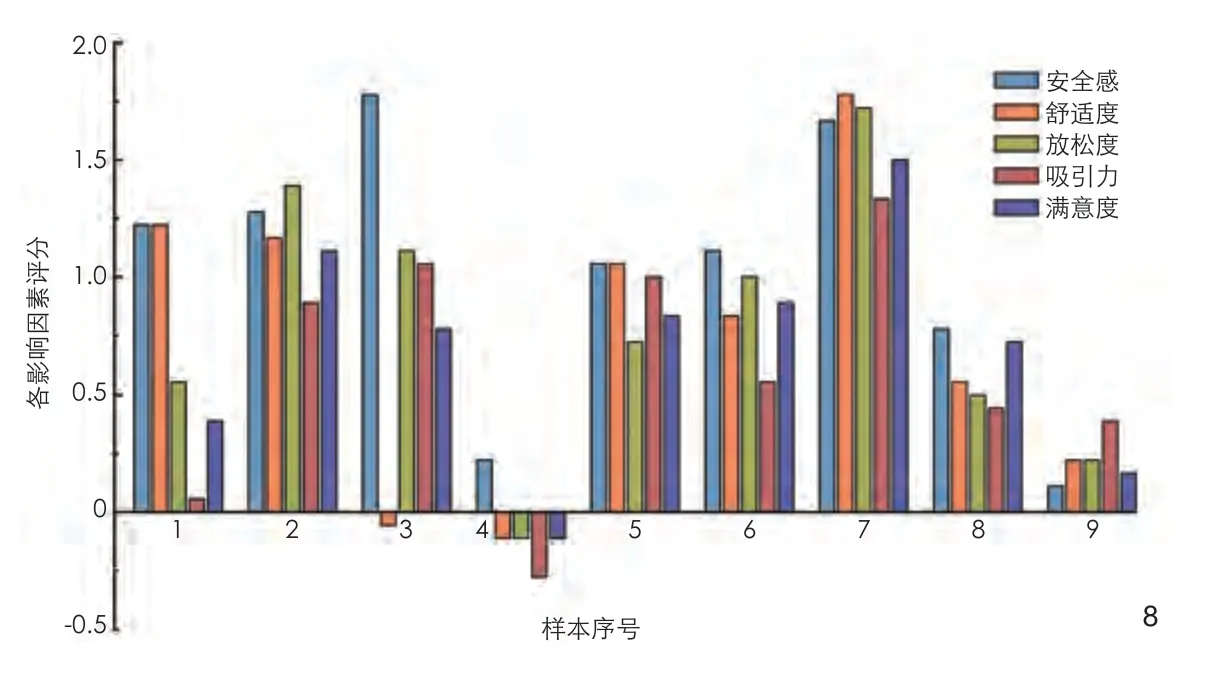
图8 步行愉悦度影响因素评分统计Statistics of scores of factors influencing walking pleasure
然后,根据前文专家评价的结果,对各影响因素进行加权平均,得到最终的步行愉悦度的得分。样本1~9步行愉悦度得分分别是0.699 3、1.187 1、0.877 7、-0.078 7、0.912 6、0.895 9、1.617 7、0.606 3、0.211 9,样本植物空间根据步行愉悦度由高到低排序为:样本7>样本2>样本5>样本6>样本3>样本1>样本8>样本9>样本4。其中,仅有样本4的评分为负值,即带给人负向情绪。
2.2.3 步行愉悦度评价的结果分析
在街道植物空间的步行愉悦度评价中,样本2和样本7的得分最高且大于1,而样本4的得分最低且小于0。结合街道植物空间现状及访谈结果,分析发现:
1)样本2植物空间的形状系数大,给人带来丰富的视觉感受及步行体验。首先,样本2的植物包括乔木、灌木和草花,植物类型丰富且品种多样,不同植物配植方式创造了空间变化;其次,由于植物生长状态良好及品种选择得当,其树木冠幅较大、株型饱满、枝叶较为茂密,形成舒适的树下荫蔽空间。
2)样本7界定街道植物空间范围的要素均为植物实体,且植物养护管理水平较高。样本7植物空间侧面Ⅰ的界定要素为地被和乔木的枝干及树冠,顶面的界定要素为乔木的树冠,侧面Ⅱ的界定要素为乔木的枝干及树冠、灌木和地被,街道植物空间整体采用乔-灌-草多层次植物配植,植物所占面积比例高。同时,街道植物生长状况良好,冠大荫浓,乔木为观花植物,灌木色彩丰富,绿化水平高。
3)样本4的乔木枝叶稀疏,灌木间断分布,无法形成有效分隔,街道植物空间无法起到荫蔽及空间分隔作用。样本4的乔木种类为松树,灌木种植在间断分布的小型种植箱内,且由于场地限制,植物的生长状况较差。所以,植物空间的侧面Ⅰ通视率较高,街道植物空间的围合感较弱,给人的安全感低;顶面通视率较高,无法形成舒适的树下空间;绿视率较低,自然感较差。
2.3 街道植物空间与步行愉悦度的关联性
2.3.1 线性相关分析
基于SPSS统计分析软件,利用Pearson相关分析识别步行愉悦度相关的街道植物空间形态特征因子,即高宽比、顶面通视率、绿视率(表3)。进一步筛选相关性显著(P<0.1)的影响因子并进行逐步回归分析,得到多元线性回归结果(表4)。

表3 步行愉悦度与街道植物空间形态特征的相关性分析Tab.3 Correlation analysis of walking pleasure and morphological characteristics of street plant space
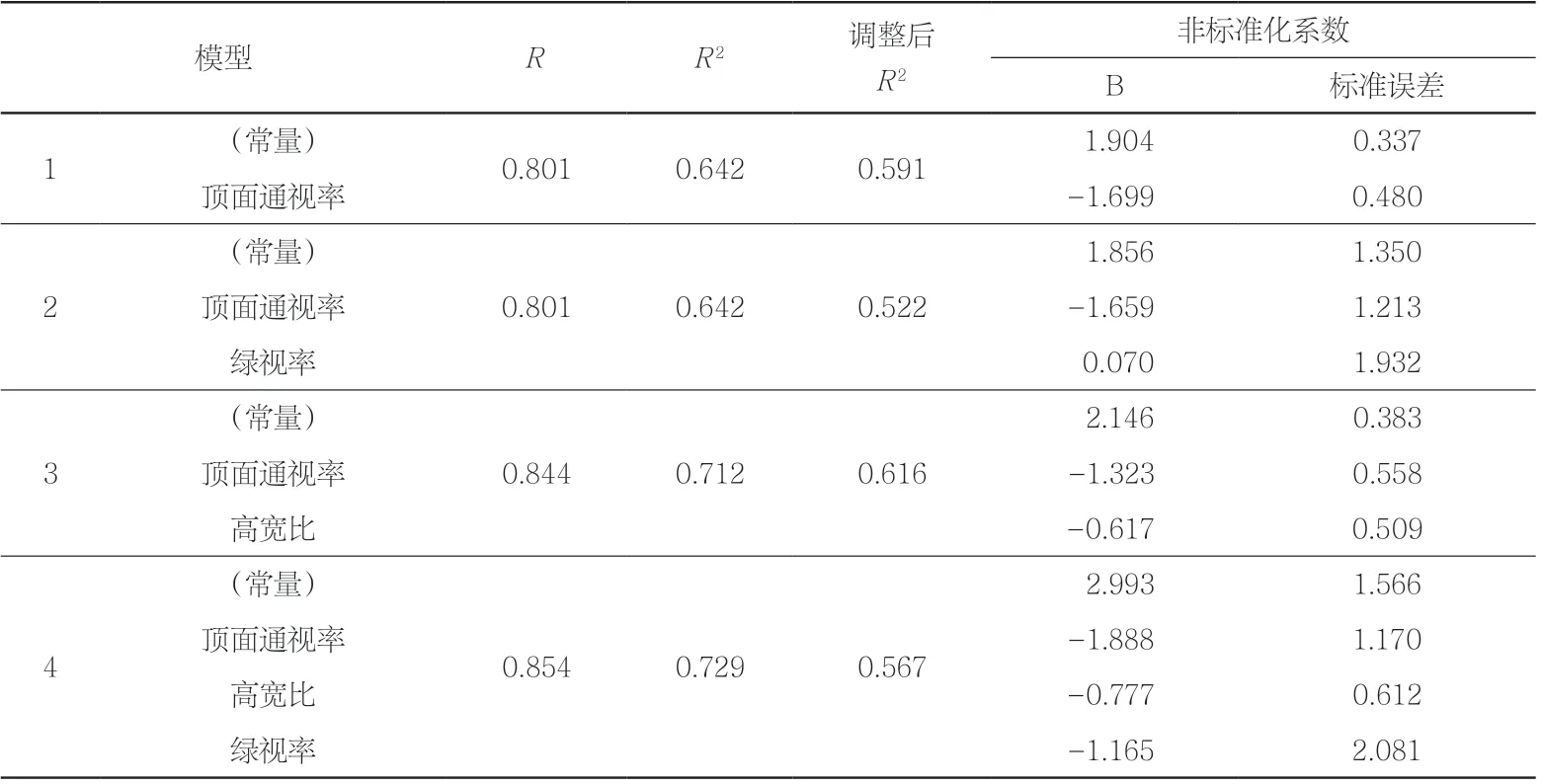
表4 步行愉悦度与街道植物空间形态特征的逐步回归分析Tab.4 Stepwise regression analysis of walking pleasure and morphological characteristics of street plant space
由表4可知,模型3引入街道植物空间的高宽比和顶面通视率构建最优回归模型,即步行愉悦度受到街道植物空间高宽比和顶面通视率的影响,均呈负相关。构建多元线性回归方程式如下:y=2.146–1.323x1–0.617x2(x1代表顶面通视率,x2代表高宽比)。方程中R2为0.712,调整后R2为0.616,模型解释能力为61.6%,多元线性回归法解释的数据集变化程度有限,说明步行愉悦度与街道植物空间特征的线性相关关系弱,但仍存在相关性。
2.3.2 随机森林分析
考虑到街道植物空间特征对步行愉悦度的影响规律存在非线性关系,随机森林法能够有效地处理非线性数据集以及变量之间的相关性[45],所以选择随机森林算法对影响因素的权重进行计算。
运用IBM SPSS Modeler中的“随机树”节点构建随机森林模型,使用组装和字段采样,计算预测变量的重要性。通过验证得到R2为0.975,表明随机森林计算模型拟合程度较好(图9)。最终得到预测变量为绿视率、顶面通视率、面积、形状系数、高宽比、侧面Ⅰ通视率。进一步通过预测变量的重要性计算各因素权重,得到绿视率的权重为0.288 5,顶面通视率的权重为0.238 8,面积的权重为0.184 1,形状系数的权重为0.164 2,高宽比的权重为0.099 5,侧面Ⅰ通视率的权重为0.024 9。研究表明,街道植物空间特征中,绿视率、顶面通视率对步行愉悦度的影响权重最大,是步行愉悦度评价最重要的因素;面积、形状系数次之;高宽比的影响权重较小;侧面Ⅰ通视率的影响权重最小。
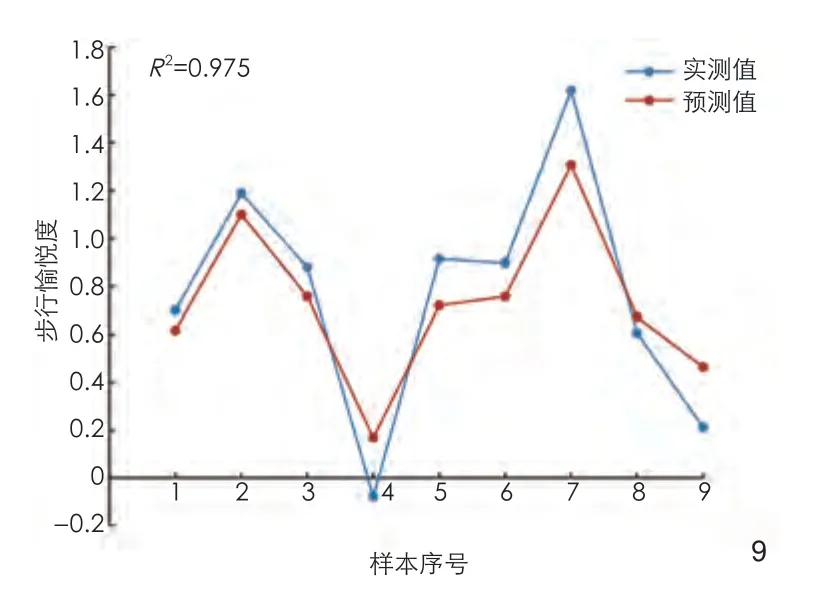
图9 随机森林拟合图Random forest fitting diagram
3 基于步行愉悦度的街道植物空间设计
3.1 评价体系
本研究依据街道植物空间与步行愉悦度的线性相关分析及随机森林分析结果确定街道植物空间各指标对步行愉悦度的影响方向,依据随机森林分析结果判断其影响程度,并结合相关研究成果及调研访谈情况进行人工判断,得到具体评分标准划分。评价体系分3个维度、6个指标,包括尺度特征(面积、高宽比)、形状特征(形状系数)和界面特征(侧面Ⅰ通视率、顶面通视率、绿视率)。基于调研及访谈结果进行各指标评分标准的划分,其中面积的评分标准结合人行道宽度的相关规定[42];高宽比的评分标准参考街道植物空间高宽比研究的相关文献[46];形状系数及侧面Ⅰ通视率的评分标准主要参考本研究的样本信息及其评价结果;顶面通视率的评分标准参考相关郁闭度、盖度研究的相关文献[47];绿视率的评分标准参考绿视率研究的相关文献[48]。通过清晰的标准,对街道植物空间各评价指标按“0、1、2”3个等级进行评分,提出以人性化理念为主导的基于步行愉悦度的大城市街道植物空间评价体系(表5)。其中,评分高于1.5的街道植物空间较好;评分在1.0~1.5的处于中等水平;评分低于1.0的较差,其街道植物空间需要优化。

表5 基于步行愉悦度的街道植物空间评价体系Tab.5 Evaluation system for street plant space based on walking pleasure
3.2 优化策略
1)选用植物要素构建或分隔街道空间并控制乔木株距。街道植物空间的侧面主要由乔木的树干及树冠、灌木、围墙、栅栏等实体或虚体构成,街道植物空间侧面由实体或虚体构成的比例越高,空间的限定越强,而界定空间要素中植物占比越大,空间带来的愉悦度越高。所以,应尽可能选用植物这一实体要素构建或分隔街道。同时,在街道植物空间的营造中,乔木株距(L)应控制在(H1+H2)与(H1+H2)/4之 间(H1和H2代表相邻乔木的株高)[46],其中,当株距在(H1+H2)与(H1+H2)/2之间时,可利用灌木、草花等强化街道植物空间界面,增强与其他空间的分隔。
2)控制街道植物空间的绿视率。街道植物空间绿视率的提高有助于软化人造空间的生硬感,提高街道自然感。相关研究表明,绿视率低于15%时,行人感觉人工痕迹明显[49];绿视率高于35%时,行人感觉绿化很好[50],同时,随着绿视率的提高,它产生的边际效益下降,且有可能因过度追求绿视率而导致过度种植,影响安全感[22]。所以,在城市街道中,应控制植物空间绿视率在15%~35%,多采用乔-矮灌-草型及乔-草型植物配植形式,保证在人视高度无植被遮挡,并在绿视率较高处适当增加照明设备并加强管理,以增强夜间安全感。
3)重视街道植物空间边界形状的复杂度与丰富度。第一,运用植物多层复合配植及立体绿化,营造街道植物空间垂直方向的层次感,丰富街道植物空间形状边界。第二,通过植物配植方式、品种、高度等的变化,创造多变的街道植物空间,使步行者进行步行活动时视野内景物发生变化,视线的通透性发生改变,带给人丰富的视觉感受和步行空间感受,从而提高空间的趣味性。
4)控制街道植物空间的高宽比。街道植物空间的高宽比较小时,给人较强的导向性,形成廊道空间,适合进行通行类步行活动;街道植物空间的高宽比较大时,行人之间容易相互干扰甚至发生碰撞,行动路线不明晰,带来较为不愉快的步行体验。同时,结合以往研究可知[51],街道植物空间的高宽比小于0.25时,人与人活动空间尺度过于狭窄,夹道效应过强,街道植物空间的高宽比大于1.00时,空间的界定感较弱,产生空间离散之感。所以应控制街道植物空间的高宽比在0.25~1.00之间,可以依据人行道宽度来选取适当高度的乔木,控制乔木的枝下高。
4 结论
本研究以武汉市的9个典型街道植物空间样本为研究对象,引入新的街道植物空间形态特征评价体系及数据获取方法,运用多元线性回归法及随机森林法进行关联性分析及权重分析,探索街道植物空间对步行愉悦度的影响,建立以人性化理念为主导的大城市街道植物空间评价体系,并基于步行愉悦度提出街道植物空间优化设计策略,为提高城市及街道建设水平提供重要参考价值。
值得思考的是,为保证与步行者视角的一致性和数据的准确度,研究中街景图的采集使用人工定点拍照的方式,花费大量的人工成本,很难大规模批量采集数据,未来可借助公众科学(citizen science),即参与性的数据收集方法,通过当地居民的参与来丰富城市街道的街景数据,完善城市开放数据,创造社会效益及教育意义。同时,研究对象限定在武汉,作为快速发展的大城市,交通的爆发性增长带来了一系列问题,正处在街道人性化建设的转型阶段,得出的研究结论具有一定的局限性。随着智慧城市、人本城市、人群出行习惯、步行友好性等方面的变化需求,街道植物空间的研究与建设需要进一步关注人性化、生态化、智能化,满足人们从生理到心理需求的转变,切合社会发展需要。
注释(Notes):
① 本研究基于步行者体验视角,所以需要充分考虑人的步行行为特征与心理感受。人的心理感受与步行距离有关,《建筑环境心理学》一书中对此进行了研究与梳理(见参考文献[52]),同时,Horning等的研究显示,步行时间控制在5 min内时,人的感受最准确(见参考文献[53])。结合其他国内外研究,表明在300~600 m的步行距离范围最符合环境心理学的要求(见参考文献[54])。
② 拍摄街景图像时选用标准镜头(焦距长度和底片或传感器的对角线长度大致相等),最接近人的视角,其视角一般为45°~50°,拍摄图像的范围与人的视角类似。相机采集角度设置为0°,即平视,高度为1.6 m,即平均人眼高度(见参考文献[55])。
③ 首先,运用PTGui软件,在专业模式下载入前、左、右3个方向的照片合成全景照片;然后,运用Photoshop软件,以水平线和垂直面为基准对全景照片进行变形校正;最后,以人的视野为依据,即集中在垂直方向向上30°、向下40°及水平方向向左和向右各60°范围内,截取全景照片中人的视野范围部分作为最终的街景图像(见参考文献[56])。
④ 研究采用0.5 m×0.5 m的方格网,方格网中每格的面积为0.25 m2。
图表来源(Sources of Figures and Tables):
文中图表均由作者绘制或拍摄,图5底图来自百度地图(获取时间为2021年10月)。
猜你喜欢
今日农业(2021年4期)2021-06-09 06:59:58
中学生数理化·高一版(2021年2期)2021-03-19 08:32:00
智慧少年·故事叮当(2021年1期)2021-01-16 07:41:35
公民与法治(2020年20期)2020-11-27 01:44:46
知识经济·中国直销(2018年8期)2018-08-23 09:16:16
中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:35
小学生必读(低年级版)(2017年4期)2017-09-04 03:22:02
数学学习与研究(2017年3期)2017-03-09 18:12:42
琴童(2016年7期)2016-05-14 10:58:55
中国老区建设(2016年1期)2016-02-28 09:32:00