
海底冷泉气体渗漏模拟观测系统设计与开发
2023-02-25 03:27:26李臣豪华志励何锐连军帅郝宗睿
山东科学 2023年1期
李臣豪,华志励,何锐,连军帅,郝宗睿*
(1.齐鲁工业大学(山东省科学院) 山东省科学院海洋仪器仪表研究所,山东 青岛 266100; 2.青岛光明环保技术有限公司,山东 青岛 266100)
我国海洋面积辽阔,海洋资源丰富,海底冷泉因潜在的能源因素和环境效应而倍受关注,提高监测和识别海底冷泉的能力,对天然气水合物开发、温室效应的研究、碳循环和深海生命科学研究具有重要意义[1-3]。声学探测是目前观测冷泉气泡羽流的主要手段,根据不同形状、不同流量气泡的声波衰减特性和声波幅值的不同来检测冷泉气体的分布范围和活动特性[4-5]。因此,对于气泡形态结构的研究有助于识别海底冷泉特征和提高声探测的精度。
目前,已有诸多学者开展了模拟海底冷泉气体释放的实验研究。Kim[6]设计了一套天然气水合物模拟装置,分析了搅拌、喷雾等物理因素对于水合物生成速率、形态变化的影响。曹学文[7]利用高压静态釜式反应容器进行了水合物模拟实验,分析了CO2水合物的生成机理。江磊磊[8]设计了天然气水合物模拟试验系统,研究天然气水合物快速合成和高效强化水合物生成的方法。以上研究都是分析天然气水合物的形成方式和外界因素对其的影响,但并未实现模拟系统的控制精度和功能齐全的统一。
本研究设计了一套控制精度高、功能全面的海底冷泉模拟观测系统。以STM32单片机为载体,基于模糊PID算法对模拟产生气泡的气体流量进行精准控制,设计的以太网同步触发器满足双目相机拍摄气泡时对低同步误差的要求,实验数据表明该系统可以为气泡形态特征和动力学特征的提取提供数据支持。
1 系统硬件设计
1.1 系统总体设计
气泡模拟观测系统主要包括气泡模拟模块、双目相机成像观测模块和控制通讯模块,系统原理框图如图1所示。控制芯片采用STM32F103YS-F1Pro单片机,其功能强大,集成了包含以太网的ENC28J60网络模块,具有丰富的通讯接口,便于进行指令传输[9]。该系统的设计可以有效地减少冗杂繁琐的器件,以更高的精度实现预期功能,系统设计示意图如图2所示。
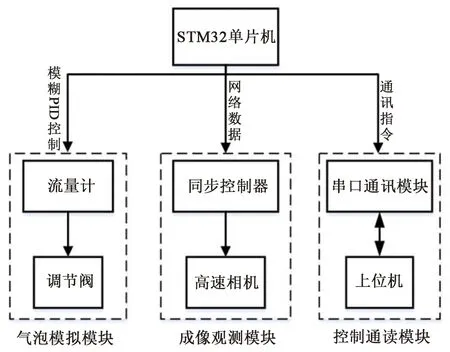
图1 气泡模拟系统原理框图Fig.1 Schematic of bubble simulation system
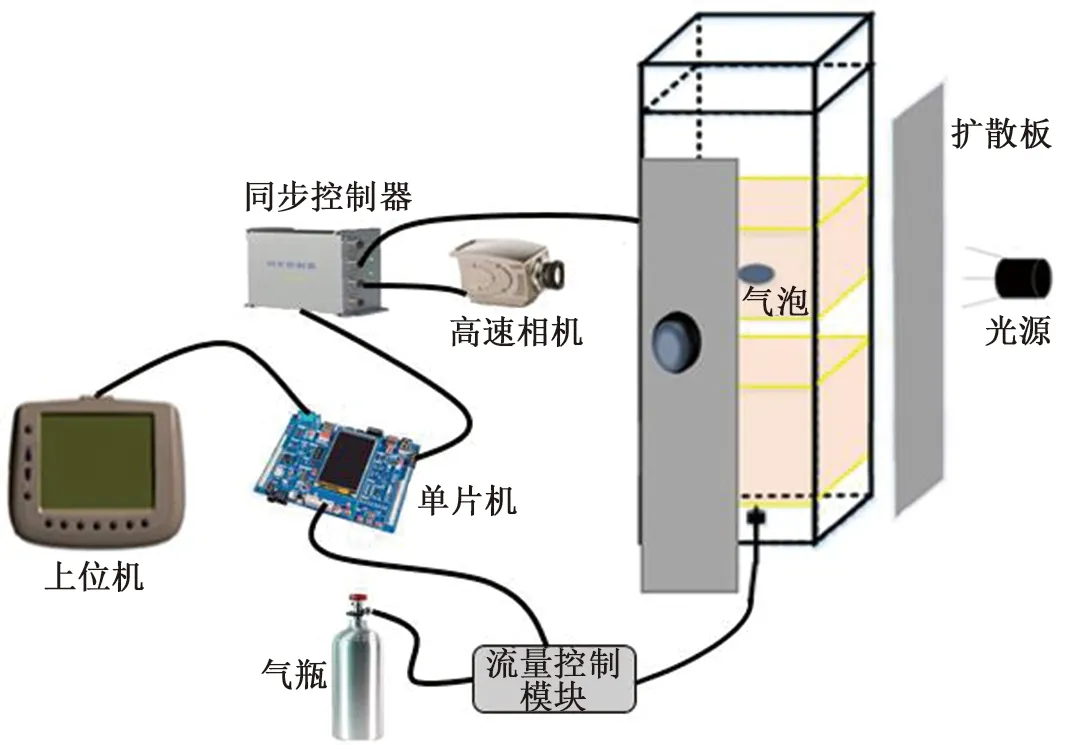
图2 气泡模拟系统设计示意图Fig.2 Bubble simulation system design diagram
1.2 气泡模拟模块设计
1.2.1 气体流量控制器的设计
SA5000流量传感器对水和空气等介质兼容性都很高,可用于本系统气体流量的测量。测量的流量值以模拟量的形式输出,经ICL7650运算放大器对流量值的模拟量信号进行放大。将获取的实际流量值与设定流量值进行比对,利用模糊PID算法对流量偏差值进行调节,最终准确地获得预期流量值。其工作原理如图3所示。
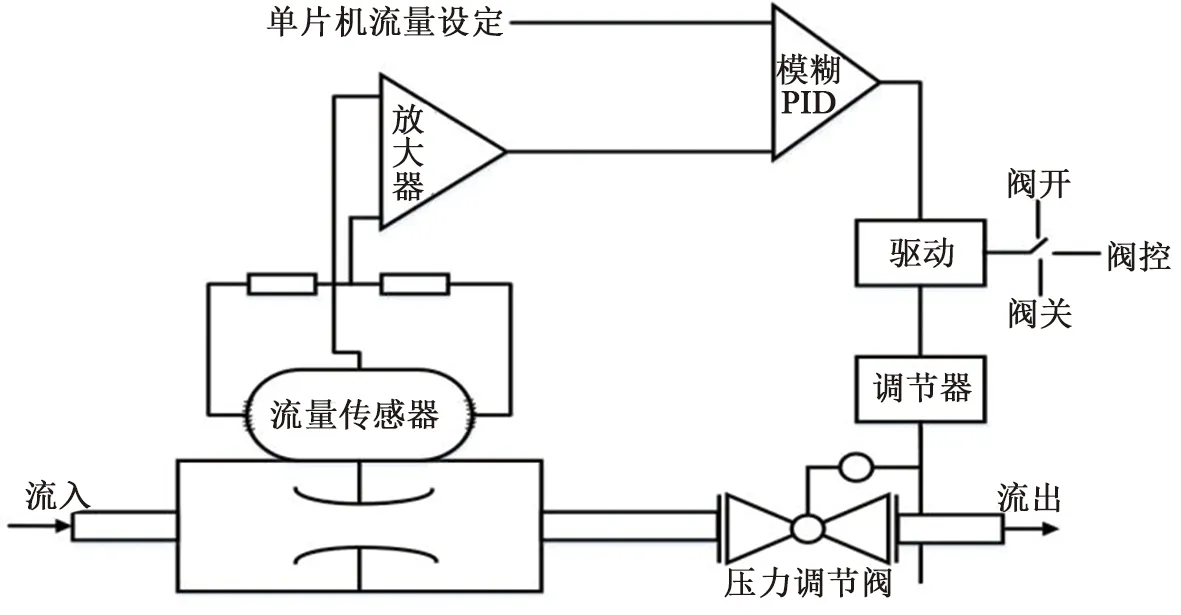
图3 流量控制器工作示意图Fig.3 Schematic of flow controller workflow
1.2.2 模糊PID控制算法
传统的控制方法无法满足本系统对于气体流量控制精度高、响应速度快的要求,为此,本文采用模糊PID控制算法,在实现PID控制自适应的同时,具有模糊控制的智能性,提高系统的控制性能[10]。模糊PID流量控制工作原理图如图4所示。
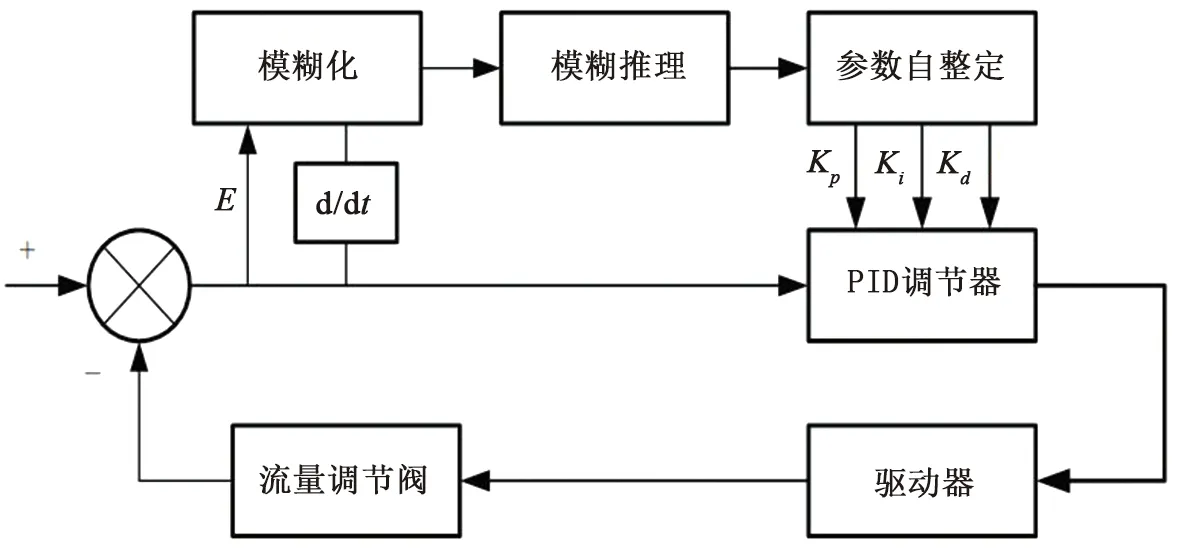
图4 模糊PID流量控制原理图Fig.4 Schematic of fuzzy PID flow control
本文在设计模糊PID控制器时,将气体实际流量值与系统预设值进行对比,通过处理器计算出气体流量偏差以及偏差变化率,以偏差e和偏差变化率ec作为输入,分析相关论域,根据规则表,进行隶属度函数的分析,进行模糊化处理。
在对流量控制系统进行综合分析后,选取流量偏差e的论域为[-6,6],流量偏差变化率ec的论域为[-3,3]。考虑到流量控制要求,流量控制系统选择使用三角形隶属函数,该隶属函数斜率较大,可以使气体流量控制系统获得较好的感知速度,及时、准确的对流量误差进行调节,三角形隶属函数如式(1)所示[11]。
(1)
式中,μa(x)为元素x的隶属度,x为模糊变量元素,参数a、c对应三角形下部的两个顶点,参数b对应三角形上部的顶点。根据隶属度函数求出模糊子集中各元素,采用加权平均法对经过模糊推理后的输出量进行反模糊化处理,将模糊量转变为执行机构中的精确量,即:
(2)
式中,xi为模糊变量元素,μa(xi)为元素xi的隶属度。最后将反模糊化推理求出的Kp、Ki、Kd值,输入到PID调节器中并调节至流量调控值与目标值匹配,最终实现模拟气泡的精准、可控复现。模糊PID气体流量控制流程如图5所示。
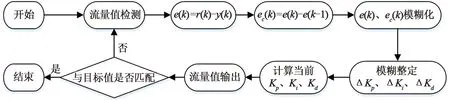
图5 模糊PID控制流程图Fig.5 Fuzzy PID control flowchart
1.3 双目相机成像观测模块设计
双目相机对模拟气泡拍摄的不同步将导致后期的气泡三维重建、特征提取等环节出现分析误差[12]。本系统的同步触发过程主要由触发信号处理、传输、执行构成,触发信号的处理和传输主要是对信号数据进行编码和对编码后的信号进行发出和接收,该部分由信号检测模块和DM9051网口芯片构成。STM32单片机的ENC28J60模块通过SPI接口与外围DM9051相连,可以实现以太网的应用,将触发数据经过网络编码后输出[13-15]。
相机的同步触发首先需要STM32单片机对硬件外设和SPI协议进行初始化设置。判断是否收到触发命令,若收到触发命令,则由信号发送器向交换机发送触发相机的数据包。同时位于触发信号接收器的交换机监听网络端口数据,当接收器收到来自以太网传输的触发信号时,单片机会驱动触发器完成对高速摄像机的触发功能。以太网的加入大大降低了信号在传输过程中的异步性和延时性。相机同步触发示意图见图6~7。
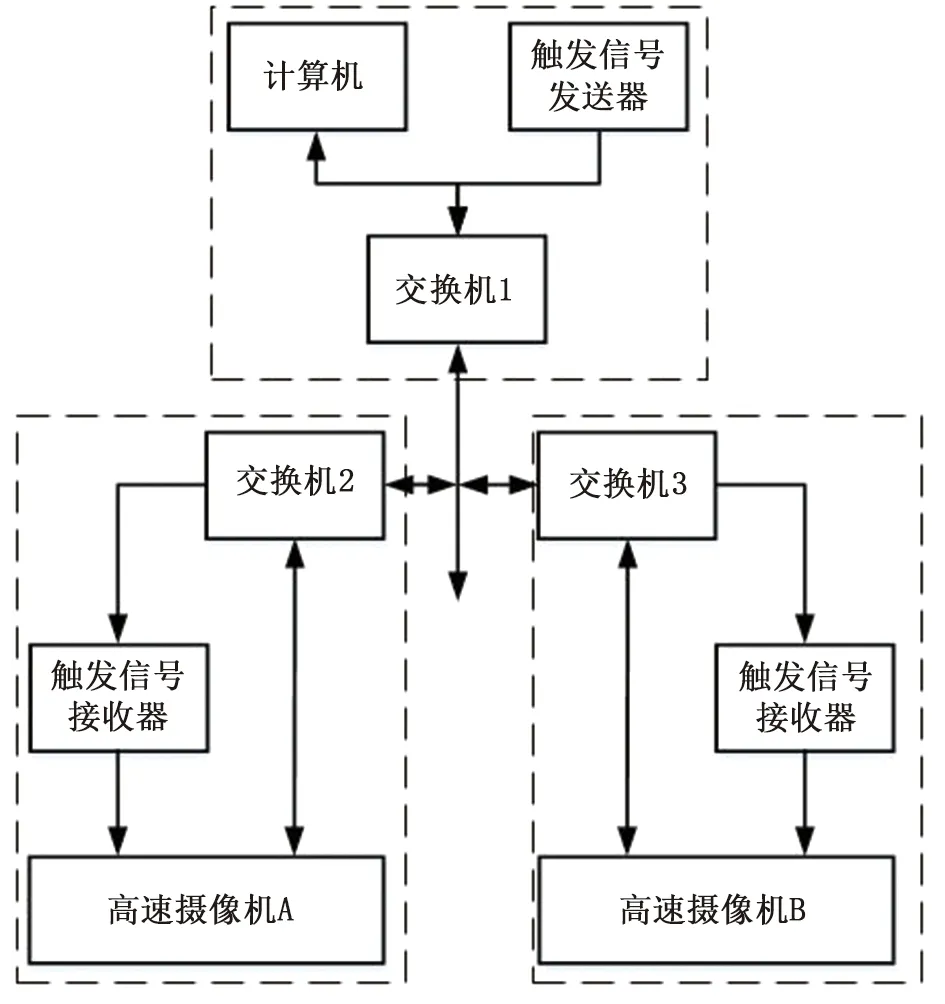
图6 相机同步触发系统框图Fig.6 Camera synchronization trigger system block diagram
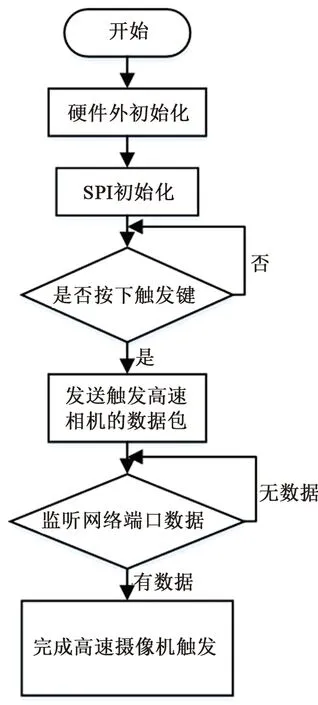
图7 相机同步触发流程图Fig.7 Camera synchronization trigger flowchart
2 控制系统软件设计
2.1 控制系统主程序设计
针对模拟气泡的精准复现这一关键技术,设计了驱动控制与串口通信中断程序,流量多级反馈方法步骤如图8所示。
2.2 控制界面的设计
基于C# WinForm界面开发的海底冷泉气体渗漏模拟观测装置控制终端,如图9所示,通过上位机可以调节流量控制器和相机等传感器参数,也可实现传感器信息的实时反馈,及时、有效和准确地反应模拟观测系统数据。
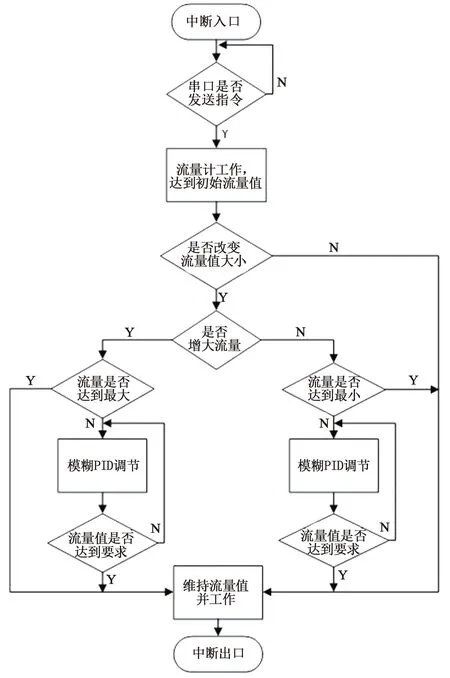
图8 中断程序流程图Fig.8 Interrupt program flowchart
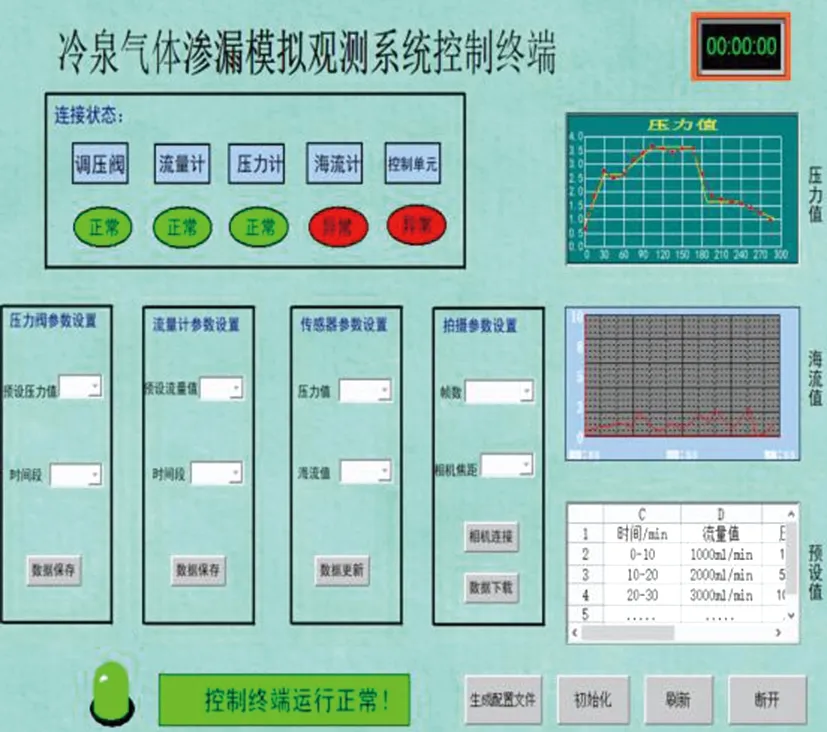
图9 控制终端界面Fig 9 Control terminal interface
3 实验分析
首先,将预期流量值设定为100 sccm,使用Simulink工具对模糊PID流量控制和常规PID流量控制效果进行仿真模拟,仿真结果如图10所示,常规PID控制下的气体流量调节时间为2.42 s,超调量为41%;模糊PID控制下的气体流量调节时间为0.71 s,超调量为6.2%。相比之下,模糊PID控制的调节过程持续的时间更短,超调量更低,鲁棒性更好。
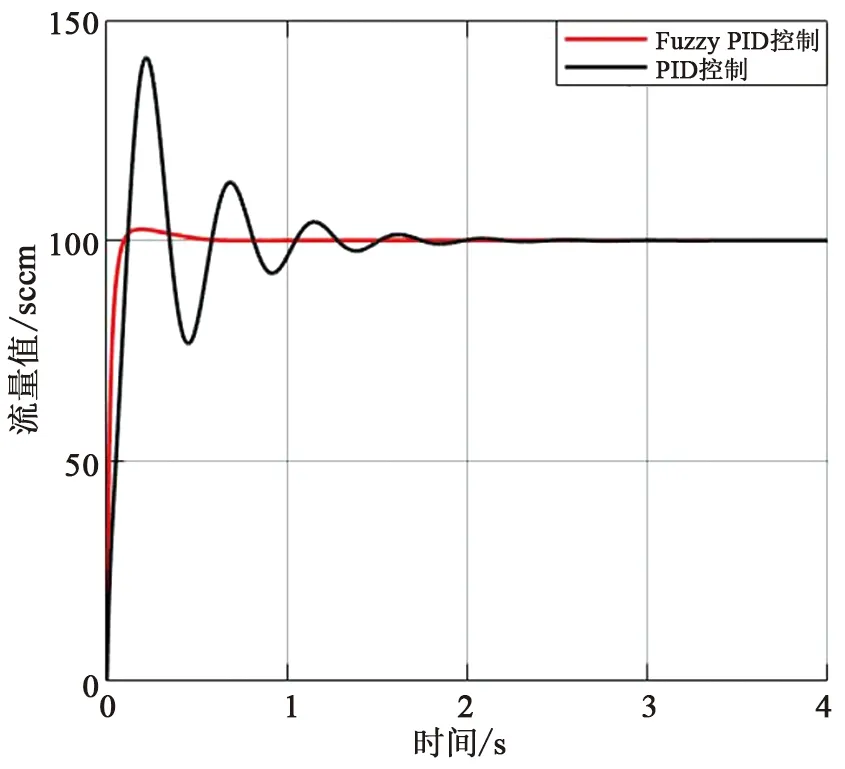
图10 模糊PID对比仿真图Fig.10 Fuzzy PID comparison simulation diagram
为了验证流量控制的实际效果,将流量值预先设定为200~1 200 sccm运行,分别采用模糊PID控制方法和常规PID控制方法对流量进行调节,用Alicat便携式气体流量计分别对控制后的实际流量进行多次测量,最后取实测流量的平均值并计算误差率,实验结果如表1所示。
实验发现较常规PID控制方法,本系统采用的模糊PID控制算法对流量误差进行多级调节,流量控制的误差率相比于PID控制最高可降低1.5%,控制效果上有较大幅度提高,面对不同流量的气体,模糊PID控制的误差率可稳定地保持在较小的范围内,呈现出良好的适应性,满足气泡模拟系统对流量控制的需求。
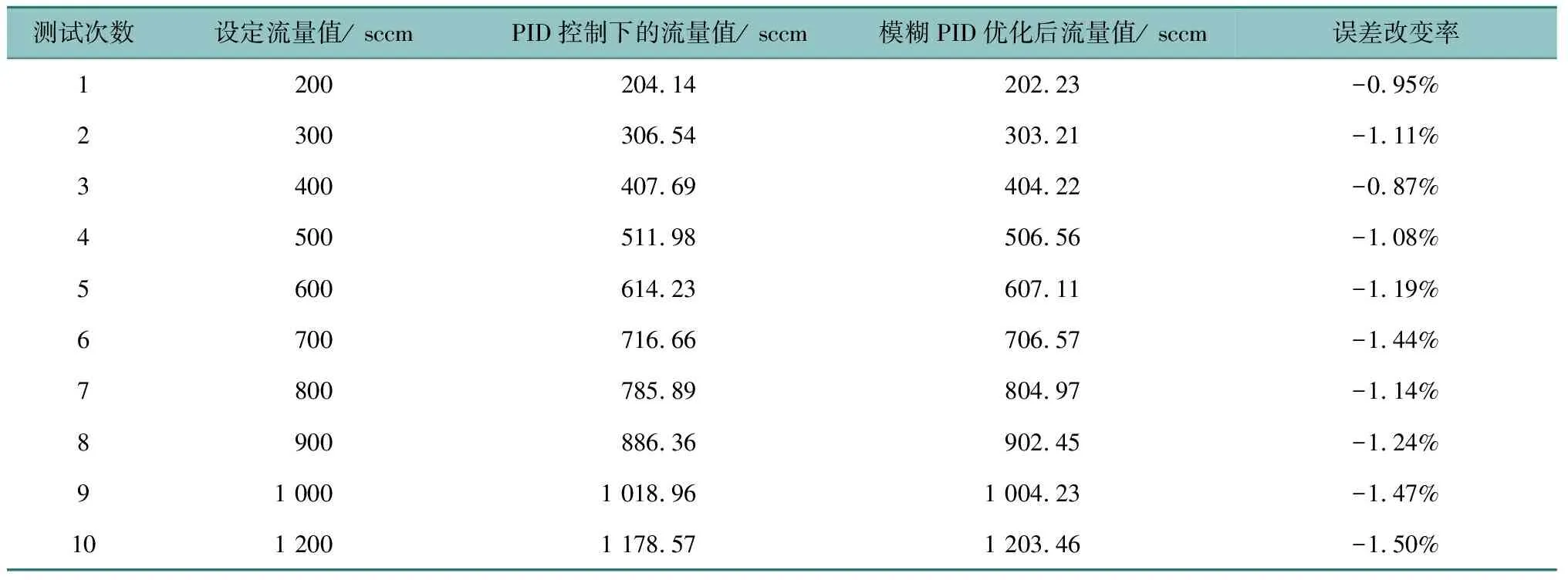
表1 气体流量控制对比实验结果Table 1 Gas flow control comparison experiment results
为了验证同步触发器对相机触发同步性的提高,分别使用本文设计的以太网同步触发器和常规触发器对GoPro HERO9相机进行触发控制,相机以每秒传输帧数为60的速度进行拍摄,利用PotPlayerPortable软件分别记录不同触发方式下双目相机拍摄同一张照片的时间点t1和t2,根据记录的时间点分别计算不同触发方式下双目相机拍摄的同步误差Δt,实验结果如图11所示。
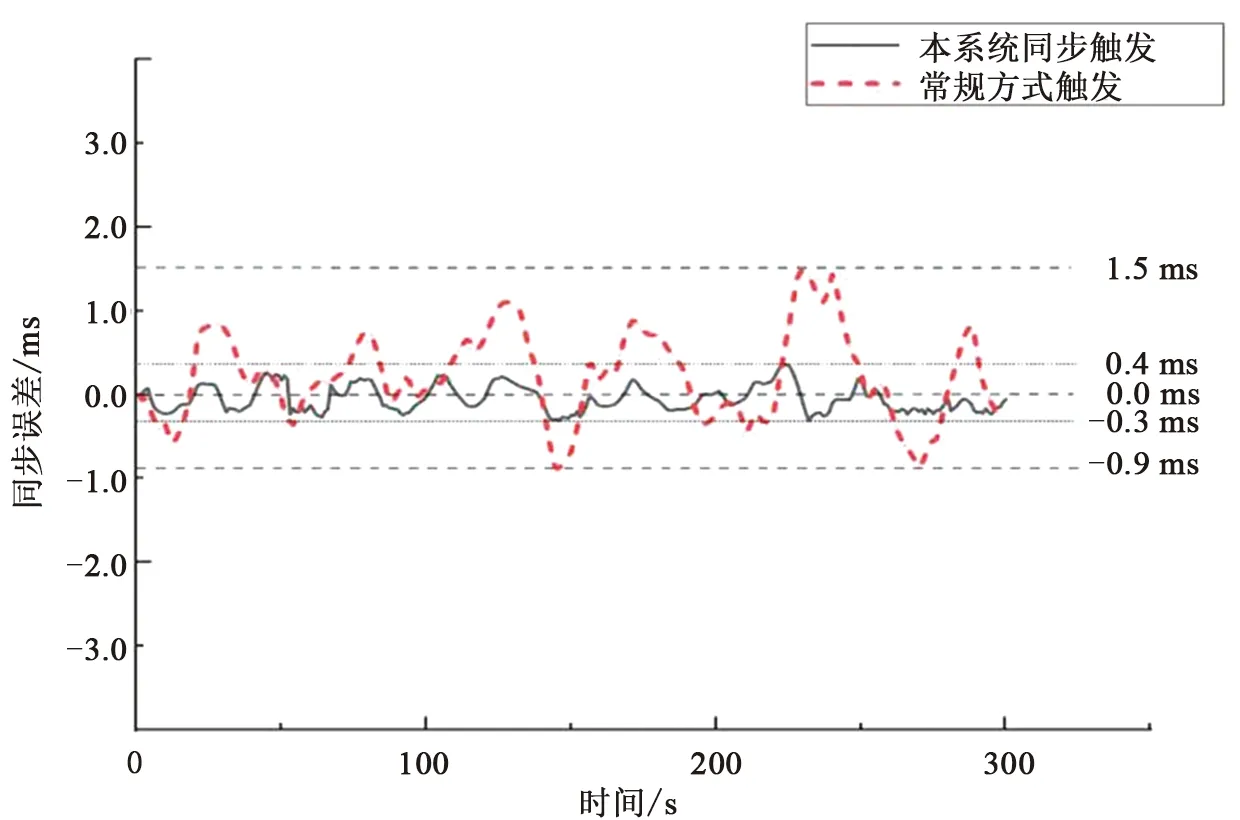
图11 双目相机同步误差Fig.11 Dual camera synchronization error
通过实验发现,常规触发方式下的双目相机最大同步误差为1.5 ms,而本文设计的以太网同步触发器因以太网的传输速率高、延时低的优势,双目相机的同步误差可有效地稳定在0.4 ms以内,误差波动幅值较小,整体同步误差的波动范围较常规状态下降低了1.1 ms,一定程度上提高了两相机拍摄的同步性。
4 结论
本文提出了一种基于模糊PID算法的流量调节技术和双目相机以太网同步触发的方法,并基于此设计了海底冷泉模拟观测系统。该系统具有流量动态精准调节、相机同步性高、数据实时反馈、抗干扰能力强的特点。该系统的设计弥补了该类装置在气体流量控制精确和相机同步性方面的欠缺,提高了数据的准确性。但随着研究的深入,对气泡模拟系统提出了更高的要求,装置对环境的自适应、复杂破碎气泡的模拟等方面都是模拟装置后期需要改进的方向。改善相机的拍摄环境,获取多样化的模拟气泡图像,将为数据的准确全面提取提供支持。
猜你喜欢
水产科技情报(2023年3期)2023-07-29 18:31:11
南方水产科学(2022年5期)2022-10-25 08:33:12
西南石油大学学报(自然科学版)(2021年3期)2021-07-16 05:27:08
电子制作(2019年20期)2019-12-04 03:51:38
百科探秘·海底世界(2019年12期)2019-09-26 14:34:42
西南石油大学学报(自然科学版)(2018年6期)2018-12-26 01:00:14
中国资源综合利用(2017年4期)2018-01-22 02:46:57
河北地质(2017年2期)2017-08-16 03:17:10
现代计算机(2016年11期)2016-02-28 18:35:20
天然产物研究与开发(2014年7期)2014-04-27 14:16:09
