动车组BTM天线灵敏度测量装置
2023-02-24 08:07:12曾还尤黄威新吉兴隆
铁道通信信号 2023年2期
王 睿,曾还尤,黄威新,吉兴隆
应答器传输子系统(Balise Transmission Module,BTM)是列车自动防护车载设备的关键部分,主要负责接收、解调地面应答器信号,并将解调后的信息传送给车载主控单元[1]。BTM天线位于动车组头车底部,主要功能是在列车经过地面应答器时,激活应答器并获取信号。BTM天线的灵敏度是直接反映BTM设备运行状况的重要参数,决定了车载设备能否正常接收地面应答器的信息。
1 BTM天线灵敏度测量工作现状
1.1 测量精度低
现行BTM天线灵敏度测量主要使用卷尺。测量人员需要一手托举测试用应答器,一手使用卷尺,同时还要用对讲机与车上作业人员进行联系,掌握当前BTM主机灯位情况,以确定是否感应到应答器。这种测量方式只能通过目测大致读取数据,测量精度难以保证。
1.2 存在人身安全风险
BTM天线与地面应答器通过射频信号进行通信。天线在应答器上方会发射27.095 MHz、43 dBm的射频能量波用于激活应答器[2],应答器被激活后,再将所存储的报文信息以射频方式返回给 天 线。通 过 查 阅GB_8702—2014[3]等 标 准,27.095 MHz的射频能量波功率密度远远高于国家标准的相关规定。因此测量人员处于电磁辐射危险下,存在着一定的人身安全风险。
1.3 劳动效率低
在当前的测量流程中,需要2人配合作业,1人在车底进行测量,1人在车上观察灯显情况,并将相关信息通过对讲机告知车底人员。而动车组车载设备检修一般是单人作业,这就需要额外调配人力,劳动效率比较低下。
1.4 管理难度高
虽然根据天线灵敏度可以反映BTM设备运行状态,并进行故障诊断,但由于作业存在一定的风险,且测量精度不高,测量难以常态化,只能结合设备大修、故障处置时进行零星排查。因此,设备管理单位很难及时有效地监测管内动车组BTM天线灵敏度,对全面掌握设备状况造成了一定的阻碍。
针对以上问题,为了提高BTM天线灵敏度测量精度及效率,本文研发了一款BTM天线灵敏度测量装置(简称“测量装置”)。
2 功能设计
测量装置的主要设计思路是按照动车组BTM天线灵敏度测量的相关要求和标准,针对存在的主要问题,通过远程监控、无线控制等技术,合理改进作业环节,使新旧作业方式无缝衔接,最大程度地保证生产工作的正常进行。
测量装置的功能架构和单元组成见图1,主要包含车上人机交互终端和车底测距执行单元2部分。车底测距执行单元通过电动伸缩杆,带动测试应答器上下动作,测距传感器实时采集测试应答器与BTM天线的距离,并通过无线模块远程发送到车上人机交互终端。距离数据经适配终端转换后,可在不同平台的上位机软件中显示。作业人员查看当前距离数据,并结合BTM主机灯显情况测量BTM天线灵敏度。该装置主要实现如下功能。
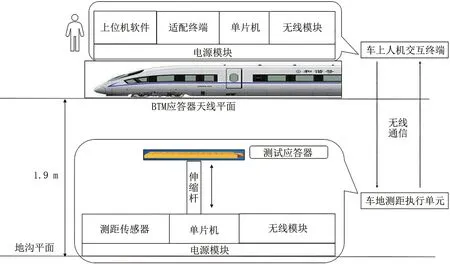
图1 BTM天线灵敏度测量装置功能架构和单元组成
1)控制指令下发。车上人机交互终端通过无线模块向车底测距执行单元发送电机正反转指令,电机带动伸缩杆伸缩,实现测试应答器升降,模拟不同高度应答器,测试BTM天线灵敏度。
2)数据采集与传输。在测试应答器升降过程中,测距传感器以20 Hz的频率采集应答器距离BTM天线的高度,并将该数据通过无线模块实时传输给车上人机交互终端。
3)数据显示。车上人机交互终端接收到距离数据后,通过适配终端转换成不同的接口,以便连接不同设备,并在笔记本电脑、手机或手持式显示终端上显示,作业人员可以实时查看该数据。
3 实现方法
测量装置的功能实现包括硬件开发和软件开发2部分。硬件开发包含硬件选型、硬件主体等,本文主要以车底测距执行单元为例进行介绍。软件开发主要是为了满足多样化的使用需求,分别在Windows、Android以及单片机环境下,开发相应的人机交互上位机软件。
3.1 硬件选型
测量装置的硬件主体包括车底测距执行单元和车上人机交互终端,均采用STM32F407芯片作为主控芯片,可提供工作频率为168 MHz的Cortex™-M4内核性能,且利用意法半导体的ART加速器,实现了FLASH零等待状态;含有17个频率高达168 MHz的16位和32位定时器,以及包括6个USART接口和3个SPI接口在内的15个通信接口;运算功能强大且支持多种通信协议,可以满足本测量装置的需求。
由于测量装置的现场检修环境比较复杂,一方面既有的信号、通信设备会发射不同频率的电磁波,可能会干扰测量数据通信;另一方面使用环境中还可能存在噪声、粉尘、高温等不良因素。因此,为有效降低环境因素对测量数据精度的影响,选用了激光测距传感器。相对于毫米波、超声波测距等,激光测距不仅测量精度高、效率高,还具有良好的抗干扰能力[4]。
在无线通信方面,选用远距离无线电(Long Range Radio,LORA)进行信息传输。LORA适合一些对传输速率要求不高、远距离低功耗的场景[5]。作为Semtech公司创建的低功耗局域网无线标准,LORA利用433/470/868/915 MHz频段,实现了超低功耗、超远距离传输,近年来在多个应用领域得到了蓬勃发展[6]。LORA还具有较好的抗干扰能力,适合在电磁环境复杂的动车检修所环境中使用,且可以有效降低供电负载,满足测量装置便携移动的要求。
测量装置的硬件基于STM32CubeIDE开发,可通过内置的STM32CubeMX图形工具配置STM32微控制器和微处理器[7],从而大大简化开发者对底层硬件的初始化和配置工作。
3.2 车底测距执行单元
测距执行单元以STM32F407开发板为核心控制单元,连接激光测距传感器和LORA模块。激光测距传感器执行距离采集,通过STM32F407处理距离数据,由LORA模块实现远程发送。硬件连接及通信示意见图2。

图2 硬件连接及通信示意
STM32F407通过UART协议,与激光测距传感器进行串口通信。当测距仪器发射出的激光经被测物体反射后,由接收端接收回射激光,测距仪器记录激光往返时间[8]。通过捕获发送和接收激光信号时的电平特征,将2个捕获值相减,再乘以时钟周期就可以得到电平的持续时间,即1个测量周期内光信号从发送至接收的时间;然后再乘以光速并除以2,即可得到当前的距离信息。
LORA模块通过专用的配置软件发送AT指令进行配置,这样可以减轻主驱动程序开发的工作量,节省开发时间。在完成配置后,STM32F407可以使用SPI通信协议,直接与LORA模块的SX1278芯片进行通信,STM32F407将读取到的传感器数据写入SX1278芯片发送缓冲区域。
车底测距执行单元的升降动作通过电动推杆实现。推杆采用齿轮传动与丝杆螺母的结构,内置电机首先通过齿轮箱进行变速,然后带动丝杆螺母运动,将旋转运动转化为推杆伸缩部件的直线运动。通过电机正传和反转可以带动推杆伸缩。该装置使用的电动推杆原始高度1 100 mm,行程900 mm。
3.3 上位机软件
作业人员在实际作业过程中出于不同的需要,如数据下载、故障处理等,可能会携带笔记本电脑、手机等不同移动设备。考虑到多样化的实际作业场景,为了尽量减轻作业负重,提高人机交互终端的兼容性,开发了分别在单片机、Windows和Android平台上使用的上位机软件,通过适配终端,可以将数据传输到不同的移动设备中,人机交互终端示意见图3。

图3 人机交互终端示意
适配终端由3根串口转接线组成,可以实现串口与USB、TYPE-C、UART接口的数据传输。使用时,输入端连接LORA模块的相应端子,输出端根据所连接的上位机终端类型选择对应的接口,连接后即可实现数据通信。适配终端示意见图4。
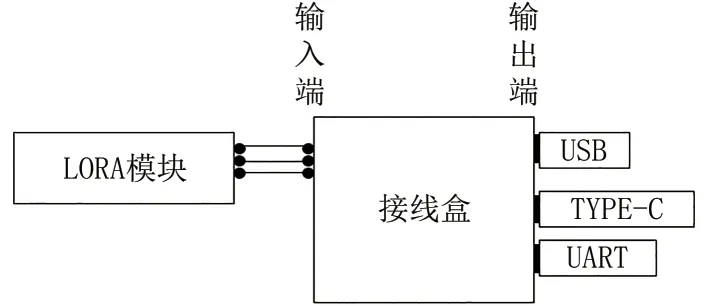
图4 适配终端示意
基于单片机的人机交互终端选用STM32F407作为主控芯片,将烧录好显示程序的芯片分别连接LCD显示屏和适配终端,STM32F407从适配终端接收距离数据,并在LCD屏幕上显示。
Windows平台的上位机软件基于LABVIEW开发实现,通过LABVIEW内置的串口通信组件循环读取适配终端USB接口发来的串口数据,并在前面板显示组件中显示。为了方便后期功能升级,在上位机软件中还预留了数据发送功能。使用时,在上位机界面中配置相应的通信参数,即可实现数据通信,当前距离信息会实时显示在数据接收窗口。
Android平台的上位机软件基于APP inventor开发实现,其主要功能与Windows平台类似。使用APP inventor中的串口通信组件循环读取适配终端TYPE-C接口发送的串口数据,并在指定标签区域显示。该平台串口通信组件默认设置波特率、数据位、停止位等基本串口通信参数,所以在上位机中未提供相应的选项卡。使用时,LORA模块通过适配终端TYPE-C接口与安卓手机相连,在APP操作界面上打开串口即可直接实现数据通信。
4 结论
本文利用嵌入式信息技术手段,开发了一款可以有效改善生产条件、优化作业流程的BTM天线灵敏度测量装置,降低了作业人身安全风险,提升了作业效率,实现了对BTM天线灵敏度的高精度测量。由于该装置在应用场景上具有较强的针对性,同时还具有成本低、重量轻、抗干扰能力强的优点,因此比较适用于动车组车载设备的检测、维修、生产,具有一定的应用和推广价值。
猜你喜欢
装备制造技术(2020年11期)2021-01-26 00:39:12
铁道通信信号(2020年9期)2020-02-06 09:15:22
科学(2020年3期)2020-01-06 04:02:51
电子制作(2017年7期)2017-06-05 09:36:13
铁道通信信号(2016年4期)2016-06-01 12:10:19
通信电源技术(2016年5期)2016-03-22 01:10:02
地矿测绘(2015年3期)2015-12-22 06:27:26
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55
城市轨道交通研究(2015年11期)2015-02-27 11:02:50
太空探索(2014年1期)2014-07-10 13:41:50