水下考古地球物理技术进展、挑战及建议
2023-02-20 08:30李勇航温明明陈宗恒姚会强万芃李斌林海陈志坚
海洋地质与第四纪地质 2023年6期
李勇航,温明明,陈宗恒,姚会强,万芃,李斌,林海,陈志坚
1.中国地质调查局广州海洋地质调查局,自然资源部海底矿产资源重点实验室,广州 511458
2.天然气水合物勘查开发国家工程研究中心,广州 511458
3.南方海洋科学与工程广东省实验室(广州),广州 511458
水下考古是陆地田野考古向水域的延伸,它既有陆地田野考古的普遍性,亦有水下环境的特殊性[1]。从史前时代到现今,从海岸带、大陆架到深海环境,水下考古涵盖时空跨度大。随着地质历史时期的海进和海退,水下空间不断变迁,考古遗存在海底可能处于裸露、半掩埋或埋藏状态。利用海洋地球物理技术进行多尺度的海底调查测绘,对于国家“一带一路”建设、重建水下古地貌环境、寻找保护文化遗产以及研究早期海洋文化至关重要[1]。海洋调查技术最初是为地质、生物、化学、物理海洋等海洋科学研究或军事目的发展而来。与传统海洋地球物理探测相比,水下考古更侧重于查明水下遗迹遗存的方位、保存状态、埋藏状况,因而对探测技术的解译精度及可靠性提出了更高要求。我国海域辽阔、海岸线漫长,开发利用海洋的历史悠久,虽然近年我国水下考古有“南海一号”“长江口二号”等里程碑式的古沉船发现,但相对其它海洋行业而言,水下考古仍属于小众领域。据粗略统计,我国目前专门从事水下考古的专业人员只有百余人,支撑开发全新的水下考古技术经费也不够充足,针对水下考古需求对现有海洋调查技术进行升级和改进可能是最优选择。由于水下考古人员对目前海洋地球物理及相关潜水器技术进展缺乏深入了解,导致通常不能以最有效率和效果的方式进行水下考古。本文系统分析了水下考古的现状需求和地球物理相关技术进展,指出地球物理水下考古未来的挑战并提出解决建议,可为水下考古和地球物理探测人员提供借鉴参考,也可为水下目标探测分类、水下打捞等调查研究提供思路。
1 水下考古调查现状
水下考古的目标主要包括海底沉船及船货、海洋沉物、因海陆变迁而沉入海底的海港遗迹和海洋性聚落以及内陆江河湖泊中埋藏的大陆性文化遗存(图1)。古地理学研究表明,距今2 万年前的末次盛冰期最低海平面比现今低约120 m,距今6 500年前大致达到现在的水平[2]。欧洲北海、波罗的海以及我国黄海、东海大陆架在距今2 万年前后绝大部分是陆地,曾是古代人类生活繁衍、迁徙交流的空间和通道[1]。大陆架在史前时代(晚更新世和早全新世)经历过多次海陆交替变迁,史前遗址大多为石器时代的遗存,多深埋于地表以下。人类文明历史以来留下更为丰富多样的历史遗迹,其中古沉船是水下文化遗址中最明显的特征之一。
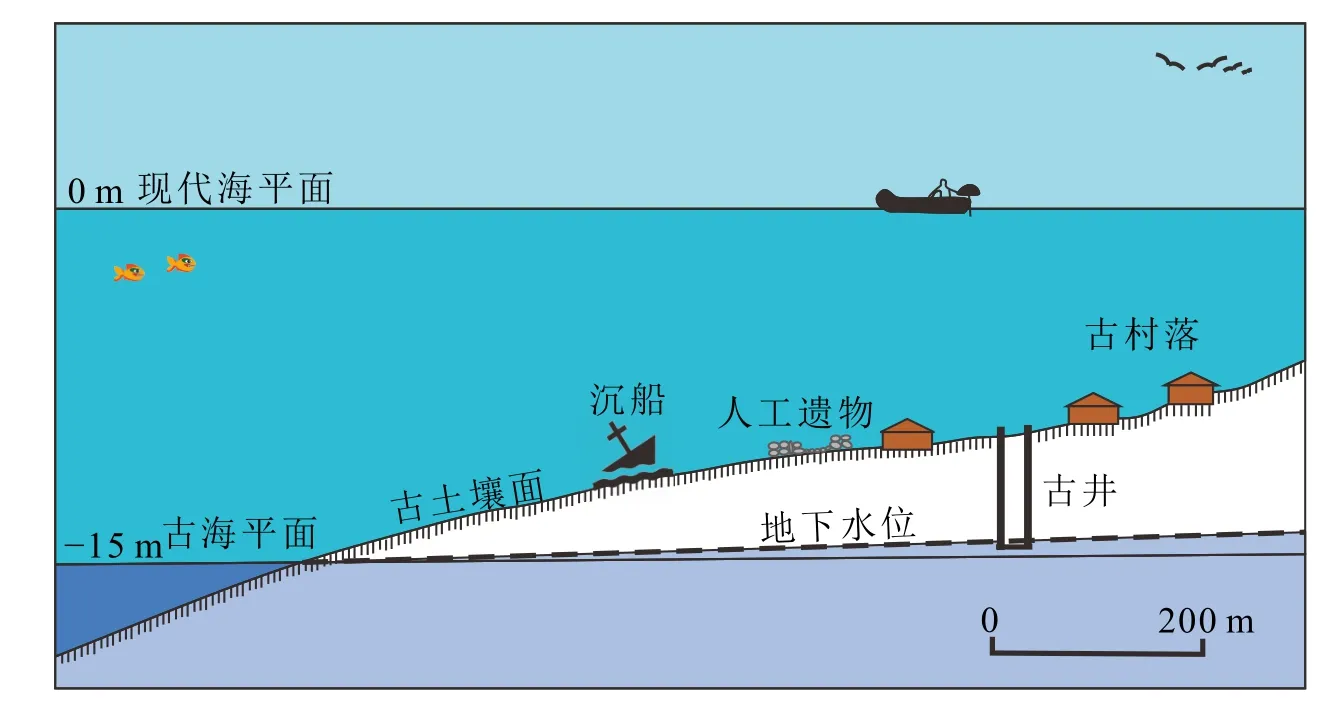
图1 水下考古遗址海平面重建 [3]Fig.1 Sea level reconstruction of underwater archaeological sites [3]
迄今为止,查明的水下遗址和古地貌绝大多数位于较浅的海域(水深<10 m),其水下环境能见度通常较好,考古难度较小[4](图2)。实际上,在10~50 m 的水深也存在大量保存完好遗址[5]。目前我国的水下考古遗址主要集中在浅水区域(图2),大多依靠人员潜水探摸探查[6]。位于深水区的遗址发现难度和考古所用技术难度都非常大,有必要加快开发相关技术。
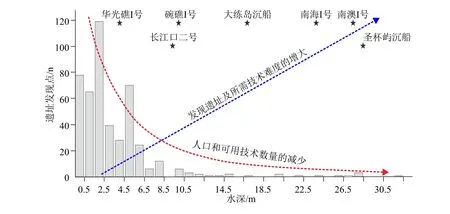
图2 水下史前考古遗址及中国主要水下考古遗址的水深信息灰色柱状显示史前遗址发现数量随水深增加而迅速减少。红色曲线表示人口密度和调查技术方法随水深增加而减少;蓝线表示发现遗址的成本和技术难度随水深增大而不断增加;黑色星号表示中国主要水下考古遗址水深信息 [4]。Fig.2 Distribution in the depth of all submerged prehistoric sites and major ancient shipwreck site in China The number of known sites decreases rapidly with depth.The red curve uses arbitrary units to indicate that the population density and tool technology decreases as we go back in time and depth, and the blue line indicates the increasing cos twith depth and technical difficulty of working.Black stars indicate depth of major underwater archaeological sites in China[4].
基于区域系统调查(Systematic Regional Survey)的考古调查作业方式自1940 年代由美国提出并逐步应用于聚落考古研究后,已经形成系统的理论、方法,并取得丰富成果[7]。通常水下考古调查在充分搜集和分析史料依据后,分为区域预查、潜力区普查、重点区详查、遗址勘探、遗址发掘/恢复/保存等阶段。最后两个阶段是水下考古最为关键的环节,需对遗址区域进行全方位、多方法的勘探,初步确定遗址的位置和范围;再派遣潜水员进行水下探摸,确定遗存的位置、分布和保存现状;最后组织进行发掘、恢复或保存等详细考古。在不同调查阶段,调查的范围、水下环境、调查目标尺寸可能存在很大差异(表1),决定所需应用的技术方法。海洋地球物理技术由于其高效率、安全、非直接的特点,在水下考古的不同阶段都起重要作用,特别是在水质混浊和低温等不利环境中优势明显。
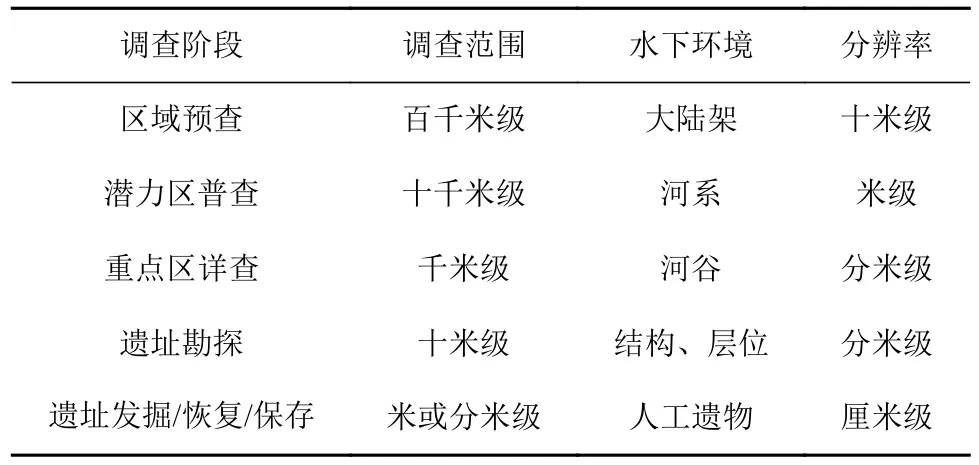
表1 水下考古调查的不同阶段及其规模、水下环境及相应分辨率Table 1 Different stages, scale, underwater environment, and corresponding resolution of underwater archaeological survey
2 水下考古地球物理技术进展
除海洋地球物理探测技术外,水下考古调查技术还主要包括二维/三维摄影测量技术、直接取样、钻探和发掘等(图3)。不同技术方法具有不同的空间分辨率及考古学意义。海洋地球物理技术在水下考古中扮演着越来越重要的角色,其可获取数据信息见表2。
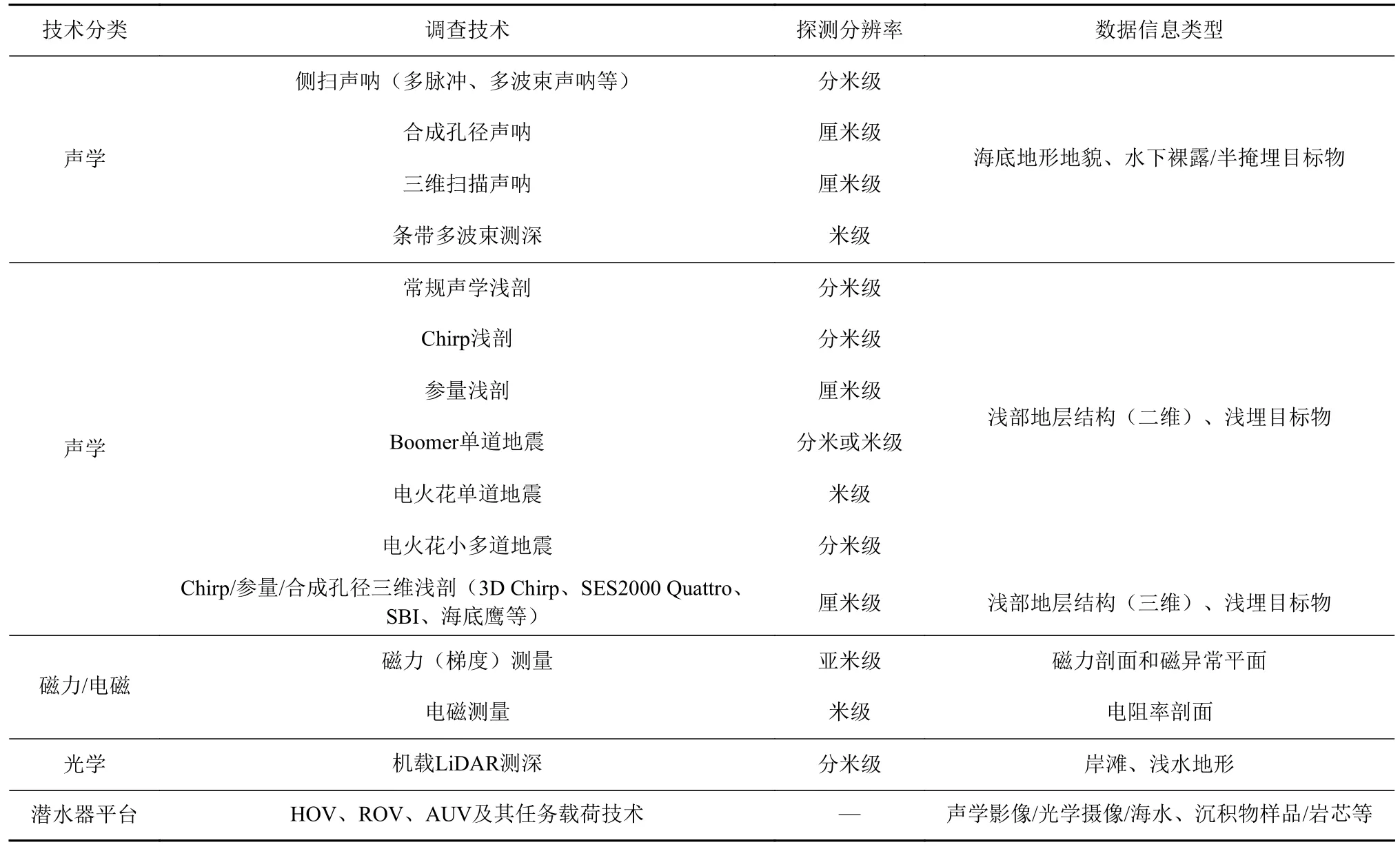
表2 水下考古主要地球物理技术及其数据信息类型Table 2 Main geophysical techniques and data information types of underwater archaeology
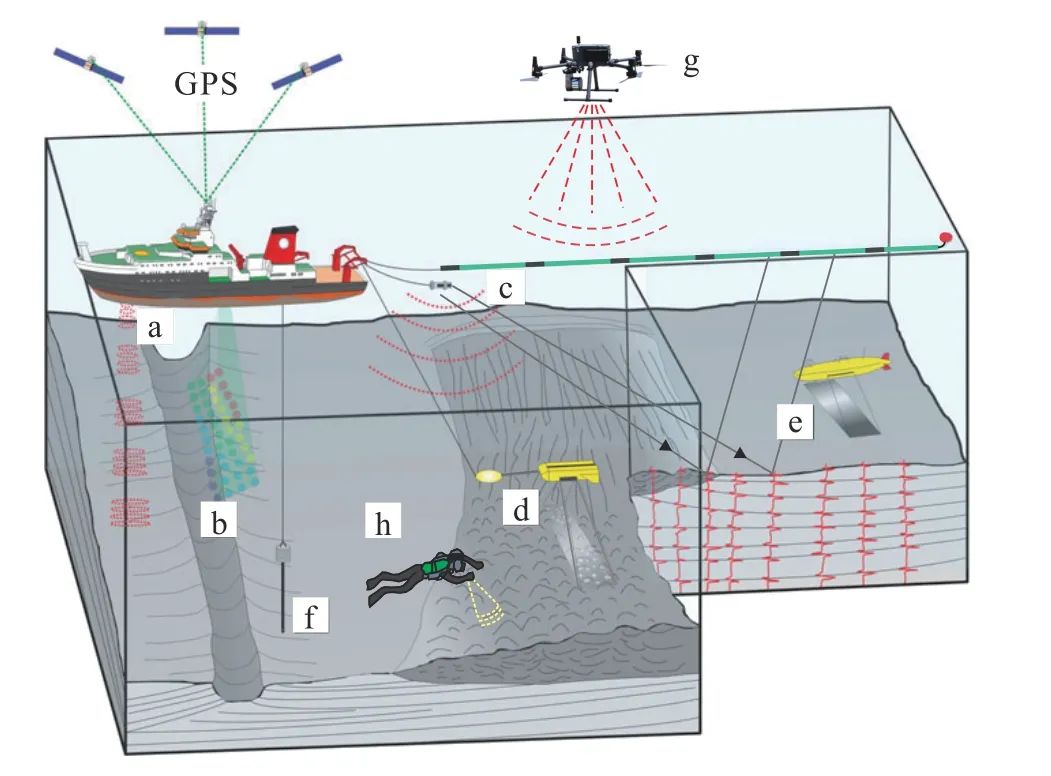
图3 典型的水下考古调查方法示意图a: 浅地层剖面仪,b: 多波束测深仪,c: 地震系统,d.侧扫声呐系统,e: AUV,f: 沉积物取样器,g: 无人机激光雷达,h: 人工潜水挖掘。Fig.3 Typical setup for underwater archaeological survey a: sub-bottom profiler; b: multibeam echosounder; c: Reflection seismic system; d: side scan sonar; e: autonomous underwater vehicle; f: sediment sampling gravity corer; g: UAV-airborne LiDAR bathymetry; h: Divercontrolled excavation.
近几十年来,以声、光、电、磁等地球物理方法为主的水下考古地球物理技术取得了巨大的进步,可获取高精度的海底地形、水下目标体及高分辨率的地层结构信息。多波束、侧扫声呐、浅地层剖面、磁力仪等常规的海洋地球物理技术方法已经在近海沉船考古探测中得到实际应用并取得良好效果[6,8-11](图4),但针对一些水下洞穴、海岸带、深海等复杂环境的考古调查还缺乏普遍性。目前基于地球物理数据识别小尺寸水下遗存仍然是一个巨大的挑战,当遗存被埋藏在海底时更是如此[12]。
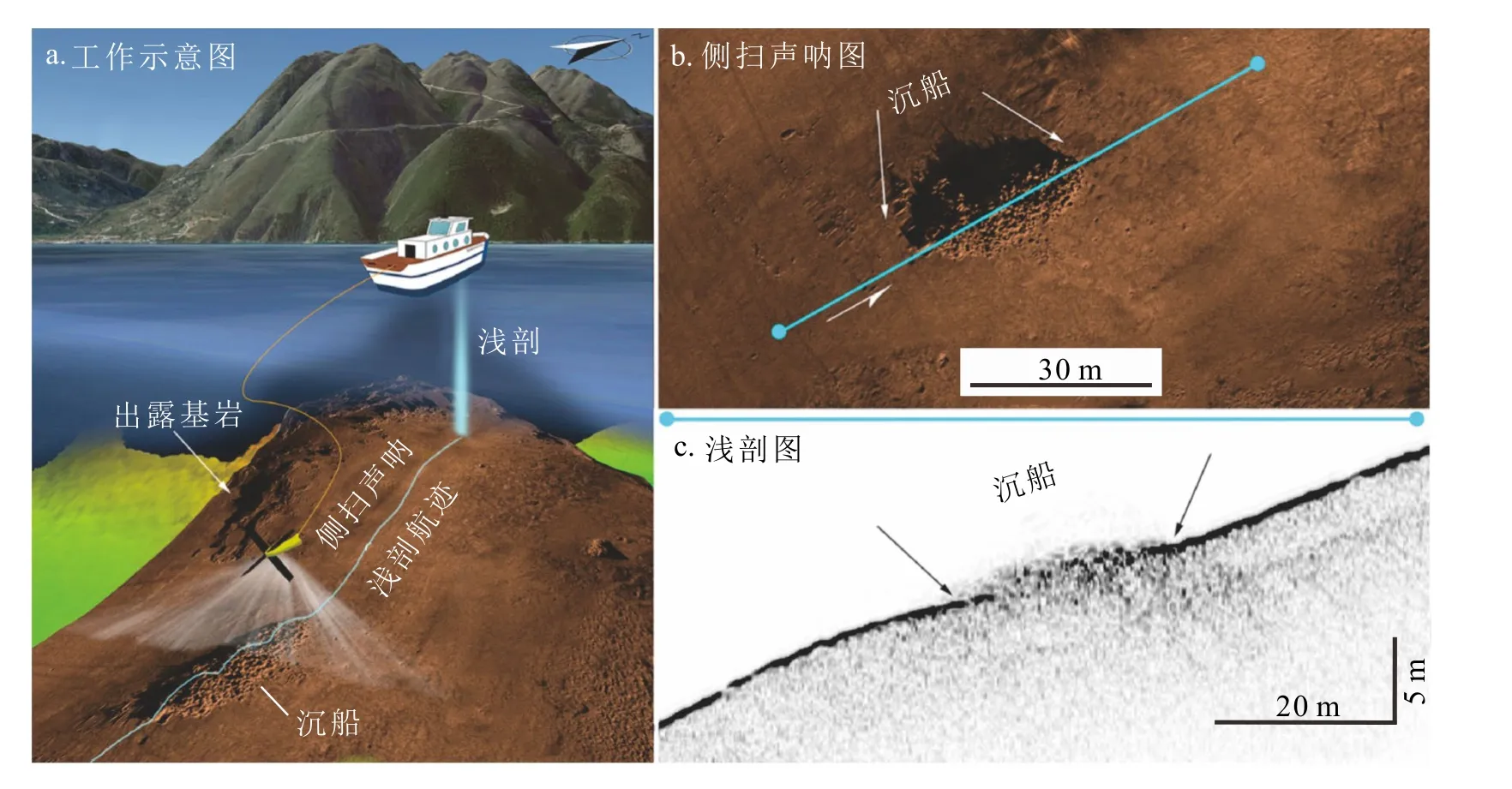
图4 近海岛礁古沉船遗址探测a: 侧扫声呐和浅地层剖面系统的基本工作原理示意图;b: 拖曳于调查船尾的侧扫声呐换能器发射垂直宽扇形高频声脉冲扫描海底,海床反射脉冲(背向散射)被记录并处理,生成海床和沉船高精度侧扫声呐地貌图像;c: 船载浅地层剖面系统沿垂直方向发射垂直窄波束高频脉冲,海底和更深层的反射声脉冲被记录和处理,生成海底和沉船浅地层剖面图像[11]。Fig.4 Exploration of the ancient shipwreck site off the coast of Island a: schematic presentation showing basic operation principles of the side scan sonar (SSS) and sub-bottom profiler (SBP); b: the SSS transmits high-frequency sound pulses in a vertically wide fan shape from a moving vessel, which scans the seafloor.The reflected pulses from the seafloor (backscatter) are recorded and processed to produce a perspective image of the seafloor; c: the SBP emits a narrow acoustic beam, which penetrates the layers beneath the seafloor.The reflected acoustic pulses from the seabed and the deeper layers are recorded and processed to produce a vertical plane seismic section of the seabed along the vessel’s trajectory[11].
2.1 海床形貌声学测量
海床形貌声学测量技术主要包括侧扫声呐、合成孔径声呐、扫描声呐、多波束测深等。多波束(multi-beam)、多脉冲(multi-pulse 或multi-ping)、动态聚焦、合成孔径声呐(SAS,synthetic aperture sonar)等新一代声呐技术的出现,使得海床声学测绘技术可快速获取高分辨率的海床形貌特征,揭示海底沉船等裸露或半掩埋的考古遗存。材料和工艺的不断进步,使得紧凑型声学测绘系统可安装在小型调查船、水面无人艇[13]、深海拖曳系统、潜水器等不同调查平台,以适应更浅或更深水域的考古调查。目前侧扫声呐分辨率已可达厘米级,使得海底形貌、结构和水下遗存的成像更加精细。高分辨率三维扫描声呐已被广泛用于管道检测、桥墩监测等工程,可在低或零能见度条件下获取海床三维图像。通过多波束背散射和水深数据,对水下沉船识别也有了很大改进[14],但要区分人工遗存和自然地物仍非常困难。此外,常规的多波束系统虽具有较宽的条带,但对水下洞穴遗址的探测能力不足,新型多波束系统通过调节发射波束角度,可获取倾斜面的精确图像,从而为水下洞穴遗址的研究提供巨大潜力[15]。
2.2 海底浅部地层测量
探测埋藏的沉船、古村落和古河道等遗迹,需要使用浅地层剖面仪、单道地震、小多道地震等高分辨率地层剖面成像技术。浅地层声学剖面技术目前常用的有Chirp、参量两类,通过换能器阵列组合和成像算法改进,已开发出三维参量、三维合成孔径等超高分辨率的浅剖系统;地震探测震源主要有Boomer、电火花、气枪等类型,检波器电缆常用的有单道和多道两种类型。空间分辨率通常与地层穿透深度成反比,不同声学或地震探测技术的分辨率和穿透深度见图5。相比于气枪震源,基于电火花和boomer 震源的单道地震和小多道地震,具有较为理想的分辨率和穿透深度,更适合于大陆架水下史前考古。通过震源和检波器的排列组合以及高级数据处理方法,可显著提高海底浅部地层考古探测的准确性和效率[16]。
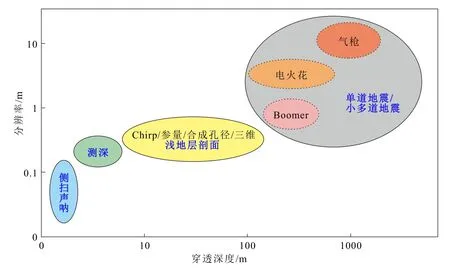
图5 不同声学或地震探测技术分辨率和穿透深度Fig.5 Relationship between resolution and penetration depth of different acoustic/seismic detection techniques
水下地学考古中,高分辨浅地层剖面可揭示埋藏古河道、贝壳堆积体等特殊结构特征,以及木质遗迹和有机质沉积地层信息,后者具有很好的保存潜力,是古海岸线和考古遗迹的良好指示物[17-19]。考古目标物体尺寸小,过于靠近海底或靠近地层边界的不利位置,和周围沉积物的声学特性相似,沉积物声波衰减导致回声强度较弱等不利因素,使目前埋藏遗存考古非常困难。如富含有机质的沉积物通常会产生生物气,致使声学图像完全模糊[20];砂质底质广泛发育区域,高频声波在沉积物中迅速被吸收,有效穿透深度很低。
常规浅地层剖面探测的主要缺点是分辨率不够高,很难直接识别小尺寸目标和埋藏遗存。实际上如果测线间距足够小,通过插值可构建地层空间准三维图像,从而可对尺寸为数十至数百米的埋藏遗存进行成像和识别,但对米级、亚米级的小尺寸埋藏遗存,需要真三维成像技术。由于声波波束和定位精度受物理空间限制,高分辨率浅地层三维成像技术十分复杂[21-22]。近年来,英国、德国、中国分别开发出3D Chirp、SES-2000 Quattro(图6)、“海底鹰”等三维浅地层剖面系统,能以分米级的水平和垂直分辨率对小型埋藏遗存、考古文化层等进行三维成像。SES-2000 Quattro 参量型三维浅地层剖面系统,换能器阵列由4 个换能器单元组成,换能器间距可根据调查目标而改变(图6a)[23]。三维浅地层剖面技术使得有效探测小尺寸的人工遗物、沉积层和埋藏物成为可能(图6b、c)。
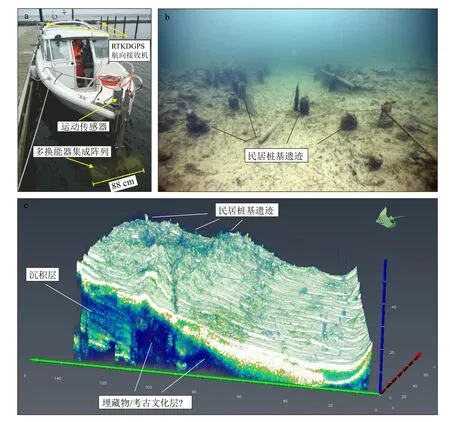
图6 三维浅地层剖面系统探测考古遗址a.安装在小型调查船上的SES-2000 quattro 参量三维浅剖; b.水下摄影显示的居民桩基遗迹; c.三维浅剖数据揭示民居桩基遗迹(b)、沉积层、埋藏物、考古文化层[23]。Fig.6 Exploration of archaeological sites by 3D sub-bottom profiler a: SES-2000 quattro parametric sub-bottom profiler mounted on a small survey vessel; b: remains of resident pilings as shown by underwater photography;c: 3D data of SES-2000 quattro reveals the remains of resident pilings, sedimentary layer, buried objects, and archaeological culture layer in b[23].
2.3 磁力和电磁测量
海洋磁力和海洋电磁(MEM,Marine Electromagnetic)测量技术虽然不如声学测量方法使用频率高,但当考古遗存物有磁性且无法用声学方法探测时(如小型含铁物体)显得特别有用。磁力仪对磁异常体的探测能力随探测距离增加而迅速降低,且易受铁壳质调查船干扰,因此须远离船尾、近海底进行布放观测或使用低磁性船只。海上磁力测量通常使用多分量传感器(梯度仪)来提高分辨率和灵敏度。目前高性能的磁力仪和智能数据处理技术可提供越来越高的分辨率,为水下考古开辟了新前景[24]。海洋电磁系统通常体积较庞大,需使用较大吨位的调查船,与声学测量技术相比,所获得数据的分辨率通常要低得多。近年通过使用高灵敏度、更小体积的发射源和接收机,海洋电磁技术有了很大的发展[25-26],主要用于沉船和海洋矿产资源探测[27]。海洋电阻率成像法(ERI,Electric Resistivity Imaging)主要应用于地下水、基岩/沉积物界面、电性异常体的探测识别[28-29]。Passaro 等将该方法应用于水下沉船探测,但测量结果并不十分令人信服[30]。2017 年电子科技大学应用大规模漂缆式直流电阻率三维探测成像法,为四川“江口沉银”遗址古河道的准确定位提供了依据,但并未见用于海洋考古的报道。
2.4 机载激光雷达探测
海岸带通常被认为存在丰富的人类遗迹,但其“人下不去、船上不来”的复杂地形特点,一直是测量调查的难点和数据空白区。虽然近年来利用无人艇进行海岸带测绘变得越来越普遍,但其实际测绘效率仍有较大提升空间。有人/无人机载激光雷达测深技术(ALB,Airborne LiDAR Bathymetry)近年在海岸带地形测绘得到迅速发展[31-32],其数据质量已可与船载测深相媲美,且调查效率要高得多(图7a)[33-34],但对水质清晰度要求高。该技术最主要优势是可在复杂、危险、浅水等调查困难区域快速获取高精度、全覆盖的海陆地形数据(图7b)。目前ALB 最大探测深度普遍可达50 m,垂直精度高于0.25 m,水平精度高于 2.5 m,是对浅水区常规声学测深不足的有效补充。
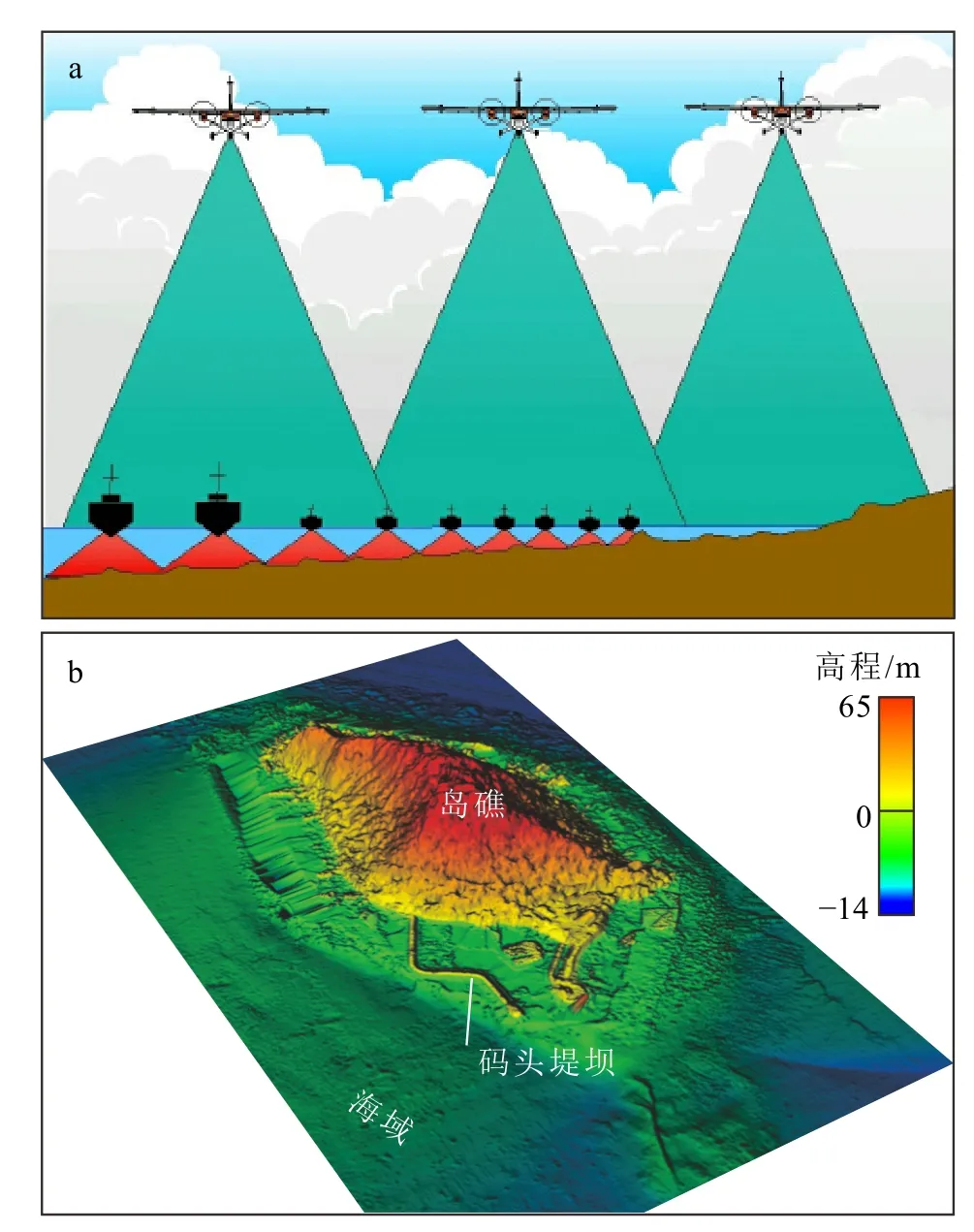
图7 机载激光雷达测深a.机载激光雷达测深效率是调查船声学测深的数倍, b.海南东锣岛多波束测深和LiDAR 测深数据融合一体成图。Fig.7 Airborne LiDAR bathymetry a: the ALB efficiency is several times that of the acoustic sounding by survey ship: b: integrated map of multi-beam sounding and Lidar sounding data of the Dongluo Island, Hainan, China.
2.5 潜水器探查
基于潜水器的深海探查变得越来越普遍,潜水器通过扩展搭载不同的传感器和机械构件,可实现各种海洋探查目的,目前已远远超出了常规的地球物理应用范畴,在深海考古中具有重要作用。载人潜水器(HOV,Human Operated Vehicle)、无人遥控潜水器(ROV,Remote Operated Vehicle)和自治式潜水器(AUV,Autonomous Underwater Vehicle)已广泛应用于海洋科考、海洋工程和军事领域。近年利用潜水器技术进行深海考古变得越来越可行和经济,突破了探查深度、作业时长等人工潜水考古的限制。HOV 调查具有水下作业时长较短(平均5~6 h)、移动速度较慢和有人驾驶等特点,因而最适合用于深海海底小范围直接观察和实物取样。ROV 调查不受海底作业时长的限制,但通常需要母船具备动力定位能力[35]。ROV 与母船之间的有缆连接,导致ROV 和母船必须协调运动,特别是在海底底流较强时,限制了调查效率和灵活性,但其续航能力强的特点使得其在目标物探查和打捞方面具有突出优势。AUV 被验证可作为稳定可靠的近海底测量平台,能够定高、定速巡线调查,搭载各类高分辨率传感器获取精细海底图像。AUV 可以在不返回水面的情况下,对大片海底进行24~72 h 的连续测绘[36]。
HOV、ROV 和AUV 根据自身结构,可安装的任务载荷通常包括导航定位传感器、光学传感器(摄影、立体静态相机)、声呐传感器(多波束、侧扫声呐、浅地层剖面仪)、化学/环境传感器以及机械作业工具等,实现海底环境构建、地形地貌测绘、实物采集等。目前巨量的海底数字摄影图像结合高精度定位技术,可很好地构建海底光学全景图像[16,37]。但到目前为止,潜水器在水下考古研究中的应用还非常有限。Mccann 和Oleson 利用ROV 对微小尺度的海底表层人工遗物进行声学和光学联合识别(图8)[38]。2018 年,中国国家文物局水下文化遗产保护中心联合中科院深海所,利用“深海勇士”号HOV 在西沙海域进行了我国首次深海考古调查,通过7 个潜次获取了大批珍贵资料,实现了中国深海考古“零的突破”[39]。2018 年至2022 年,广州海洋地质调查局联合利用“海马”号ROV、合成孔径声呐深拖和船载多波束测深系统在中国南海发现并打捞多个考古遗存目标。如何更贴合考古学需求,基于潜水器的深海考古还有待进一步深入研究。
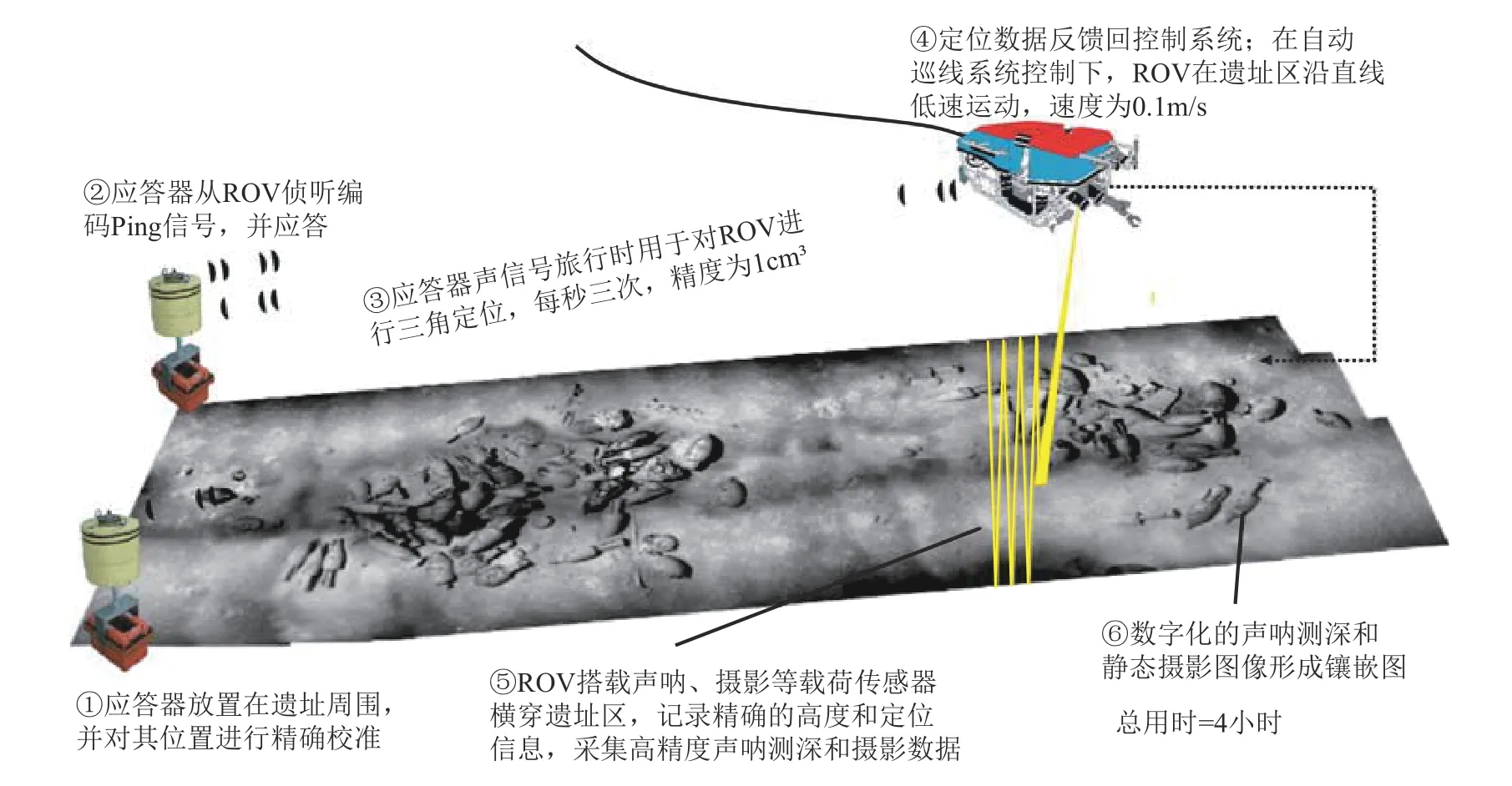
图8 利用ROV 对水下遗址进行高精度水深和摄影测量[38]Fig.8 Bathymetric and photogrammetry of underwater sites by ROV[38].
3 水下考古对地球物理技术的挑战
地球物理水下考古存在的挑战主要是如何提高发现考古遗址的准确率以及降低经济成本[40],以及如何对海岸带、洞穴、深海等特殊环境遗址进行有效的调查。
(1)海床数据图像中遗存的自动识别
尽管目前声学和光学摄影技术取得了进步,但尚无软件或人工智能算法可以有效自动识别海床上的遗存。由于海洋环境的复杂性,以及地球物理声学方法本身具有的多解性,使得辨别海洋中各种各样的水下文物遗址的声学特征非常困难[12]。随着深度学习技术的发展,卷积神经网络(CNN,Convolutional Neural Network)越来越多地应用于海洋测量图像识别和水下目标分类。利用CNN 对侧扫声呐图像上的目标进行自动识别,可以提高识别精度和效率[41]。将半合成数据生成与深度迁移学习相结合是提高水下目标分类精度的有效途径[42]。未来的研究需要利用深度学习方法将背向散射、高精度水深和光学摄影数据高效融合起来,进一步提升遗存自动识别的准确率和考古效率。
(2)埋藏的小尺寸人工遗物探测
探寻埋藏海底的小尺寸人工遗物(骨骼、器具等)仍然是一项重大挑战。目前水下声学成像系统的空间分辨率最高为几十厘米,且由于浅层气、砂层等沉积环境影响,文物遗存与周围沉积物之间的声学差异不足,难以探测识别。虽然利用差分共振声谱法测量岩石声学特性取得较大进展[43],但利用该方法识别埋藏的小尺寸人工遗物仍不够可靠。针对浅埋沉船探测,未来在声学可控实验模拟、数据精细处理和学科交叉综合研究等方面进一步加强[44]。
(3)洞穴遗址探测和发掘
常规的海底测绘方法是基于平面视图投影,不适用于勘探垂向的洞穴遗址。ROV 通过惯性导航系统和水下定位系统辅助,搭载多波束声呐系统、三维声呐扫描系统或激光扫描系统对水下洞穴测绘是一种可行方法[45],目前的数字影像处理软件也支持对多波束测深和侧扫声呐数据进行三维渲染显示,但做到高精度的三维场景构建仍需要在高精度定位、洞穴内部特殊探测技术等方面努力。
(4)潮间带遗址调查
潮间带通常被认为存在丰富的人类遗迹,但潮间带水深极浅、潮汐效应明显、波浪扰动以及浅层气的普遍存在,导致潮间带考古非常困难。综合利用声学和激光雷达技术至关重要,特别是将高潮期间的海洋数据和低潮期间的陆地数据融合,能起到很好的互补作用[46-47]。如融合无人机激光雷达地形数据和无人艇多波束测深数据,实现海陆地形成图,有助于重建古地貌环境,发现人类遗迹。此外,Kruiver 等研究评估了利用地震横波和面波对潮间带和近岸地区进行地学考古的潜力[48]。
(5)深海考古和发掘
近年使用潜水器进行水下探测取得了惊人的发现,特别是在深海沉船考古方面。目前HOV、ROV 和AUV 的用途主要是测量、录像和采样,需要从传统的海底声学和光学调查、工程打捞,进一步拓展提升到海底考古搜寻、精细观测、精准发掘或打捞。这需要高度精密的潜水器、可搭载的各类高空间分辨率的地球物理探测系统、配套的发掘工具和精准定位的远程操控,这将带来很大的工程挑战。
4 地球物理水下考古建议
(1)升级改进现有调查技术,开发适用于水下考古的新技术
由于水下考古调查范围和环境条件差异较大,研究涉声学、电磁、激光雷达、潜水器平台、摄影测量、水下取样和发掘等技术。其中许多技术最初是为陆地测绘、军事研究等目的开发,为使这些技术适合水下考古,需要和科研院所、技术厂家合作,对现有技术进行改进。如多来源数据融合软件的开发,使得水下考古更加立体,水下文化遗址场景得以深度还原;通过潜水器、深拖系统等近海底探查方法,进一步提升现有声学、地震、电磁等海洋地球物理技术对海底探测的空间分辨率,满足考古需求;改造提升各类潜水器,替代人员潜水考古,以适应深海考古需求。
(2)加强海洋各行业合作,增加考古遗址发现数量和降低考古成本
相对于海洋调查而言,现有的水下考古力量非常弱小,且海洋基础资料也十分缺乏。海洋石油公司、海洋科研院所等机构的海洋工程、海洋科考项目通常会进行声学/地震调查、海底钻探、沉积物取样,这些资料对水下考古工作前期评估具有重大意义。虽然陆架三维地震测线间距通常为几百米,空间分辨率较低,但三维地震数据结合最新数据分析技术可有效绘制晚更新世和全新世古地貌[49],钻孔岩芯可获取海底地层和基底信息。通过加强机构合作,利用地质地球物理等基础资料可大幅降低成本。此外,海洋开发建设还可能造成考古遗迹破坏甚至完全消失。特别是近岸海砂开采,因为海砂富集区通常与考古潜力区相重叠。因此,应加强行业合作,增加考古遗址发现数量,降低考古成本,同时避免不必要的破坏流失。
(3)建立跨学科、国际性的水下考古装备技术共享机制
水下考古调查技术包括资料采集、处理、解释和评价等多个环节,单个海洋研究机构或考古机构难以全部完成,且并非每个机构都拥有多门类的调查设备和专业技术,特别是深海考古调查技术装备需要大量人力和物力的投入。因此,应建立机构之间的合作机制,共享专业技术和知识,而且这种合作应是跨学科的、具国际性的。
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
海洋信息技术与应用(2020年3期)2020-08-24
家庭影院技术(2020年6期)2020-07-27
小学科学(学生版)(2019年10期)2019-11-16
家庭影院技术(2019年1期)2019-01-21
家庭影院技术(2018年11期)2019-01-21
家庭影院技术(2018年10期)2018-11-02
辽金历史与考古(2018年0期)2018-03-21
乡村地理(2016年2期)2016-06-15