
PSO-ASVR 在三波长路面状态传感器定量标定中的应用
2023-02-19 12:50:46田雨卉张厚庆
应用光学 2023年1期
杨 森,田雨卉,张厚庆
(东北林业大学 机电工程学院,黑龙江 哈尔滨 150040)
引言
路面状态的精确监测可以有效保证冬季道路安全管控,利用路面状态传感技术实现对积水、结冰和积雪等多种路面条件的快速察觉,不但能够为日常出行提供便利,还能够大大减少交通事故的发生[1],对于交通安全、保障人民的生命和财产安全都具有极其重要的意义。目前国内外主要的路面状态检测方法包括红外多光谱法、偏振法、雷达技术检测、气象模型法和图像分析法,这几种方法都可以在识别不同道路状态时达到较高的分类准确率。
通过路面状态传感器定量测量路面覆盖物厚度可以进一步表征路面特征,基于现有的路面状态检测技术研制的传感器包括电容式、电阻式、图像式、近红外式传感器等多种类型,并且均可以对结冰、积雪、积水等多种路面状态进行有效分类。SHEN Y C 采用电容传感方法检测霜层生长,基于边缘效应设计制作了一种数字式电极电容式传感器[2]。Habib 等人提出了一种嵌入式的电阻传感器系统,实现了道路和桥梁表面的湿、干、冻路面状况的高效检测[3]。翟子洋等人基于路面湿滑状态检测模块采集路面图像,并利用神经网络模型识别路面湿滑状态信息,进而设计了一种基于路面湿滑状态识别的车辆安全预警导航系统[4]。Ruiz-Llata 等人研制了一种基于半导体激光器的近红外漫反射光谱路面状况传感器,实现了对路面存在水、泥或冰的状况的准确测量[5]。Ruan C 等人研制了一种基于多波长的远程路面气象状况传感器,利用多波长光学遥感技术和近红外光源实现了干、湿、冰和雪4 种路面状态以及路面水膜厚度的定量测量[6]。
在路面状态传感器的定量标定中,标定模型一般通过路面覆盖物厚度D和传感器响应电压V的拟合实现,标定数据处理精度直接影响路面状态定量测量的准确性。Lovén 等人基于线性混合拟合模型定量校准了移动车辆安装的道路天气传感器的观测结果,有效降低了传感器测量值的拟合误差[7]。许一飞等人采用多项式拟合模型标定机场结冰检测系统[8]。Gui 等人采用三次多项式拟合模型对基于双传感器的6 种路面条件的路况探测器进行标定,通过评估不同路况条件下的传感器的输出值,验证了该模型的拟合性能[9]。然而,路面状态传感器的标定数据存在非线性和非均匀分布问题,传统定量标定模型在应对上述问题时存在局限性[10],拟合精度的不足会直接降低数据处理精度,大大限制了路面状态传感器定量测量精度的提升。
针对上述问题,本文利用基于结构风险最小化的SVR 方法进行标定数据拟合,并利用PSO 算法实现SVR 中参数最优化,进而降低路面状态传感器标定数据非线性引入的处理误差。同时,构建AP 流程进行标定数据最优化预处理,降低路面状态传感器标定数据非均匀分布引入的处理误差。在此基础上,提出了基于PSO-ASVR 的路面状态传感器标定模型,并通过三波长路面状态传感器标定数据处理的实际应用,对比验证其在降低路面状态传感器定量标定误差上的有效性。
1 基本原理
1.1 支持向量回归(SVR)算法
路面状态传感器定量标定数据存在非线性问题,传统拟合方法在此条件下拟合效果不佳。为了降低上述问题引入的拟合误差,本文采用SVR算法实现最佳数据拟合,该算法面对小样本和非线性数据具备较好的拟合性能[11-12]。对于训练样本:

通过SVR 训练使得拟合值与真实值之差不超过误差阈值ε,预测方程为

式中:w为权重矢量;b为 阈值。针对误差阈值 ε外的数据,通过调整惩罚程度保证模型精度,边界的上方和下方赋予2 种不同的惩罚值, ξ是松弛因子:


1.2 自适应预处理(AP)流程
路面状态传感器定量标定数据存在非均匀分布问题,会影响数据的拟合精度。为降低上述问题引入的拟合误差,本文构建AP 流程来实现最佳的数据预处理。AP 流程图如图1 所示,以均方根误差RMSE 为基准,从不同的数据转换方法和数据平移方法中选择最优模型[14]。其中,采用的数据预处理方法包括归一化、Log 变换、数据平移等多种类型。RMSE 可表示为
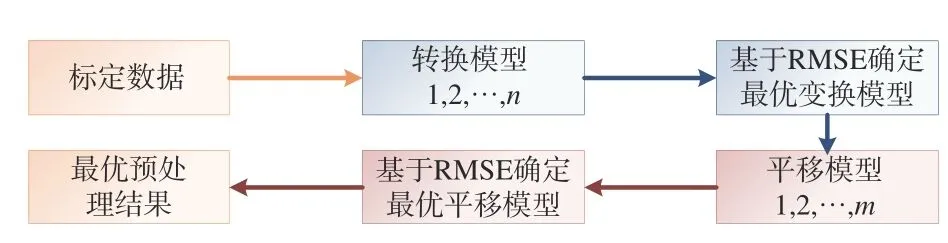
图1 AP 流程框图Fig. 1 Block diagram of AP flow
1.3 粒子群(PSO)算法
SVR 算法的内部参数惩罚因子C、不敏感损失参数 ε和径向基函数核参数 σ直接决定拟合性能。为降低人工设置参数引入的拟合误差,本文选用PSO 算法实现SVR 算法中的参数最优化。PSO算法中每个问题的解都可以看作一个粒子,群体中第i个粒子的位置为xi(k), 速度为vi(k)[15]。当前时刻的局部极值记为Pibest, 全局极值记为gbest。在每次迭代中,通过跟踪粒子个体、全局极值和前一时刻的状态调整当前时刻的位置和速度,迭代公式如下:


式中:vi(k)、vi(k+1)、xi(k)、xi(k+1)分别是粒子当前时刻、下一时刻的速度和位置; ω是惯性因子;c1和c2是学习因子。
基于PSO 算法实现SVR 参数最优化步骤如下:
1) 初始化粒子群参数;
2) 用(8)式计算RMSE,确定局部极值初始值;
3) 用(9)式和(10)式更新粒子位置和速度;
4) 通过(8)式计算RMSE 并确定全局极值;
5) 比较局部和全局极值,更新全局极值;
6) 若得到最优值则终止,否则继续寻优。
1.4 PSO-ASVR 方法
基于上述流程和算法的融合,本文提出PSOASVR 方法应用于路面状态传感器标定数据处理,以期降低标定数据非线性和非均匀分布下的数据处理误差。首先利用AP 流程对标定数据做最优数据预处理;然后基于SVR 算法进行标定数据最优拟合,其中通过PSO 算法实现SVR 参数(C,ε,σ)最优化。该方法覆盖标定数据获取后的预处理过程和拟合过程,在2 个流程中都以RMSE 最小为评价指标实现最优化,最终实现标定数据处理误差的最小化。PSO-ASVR 方法流程图如图2 所示。
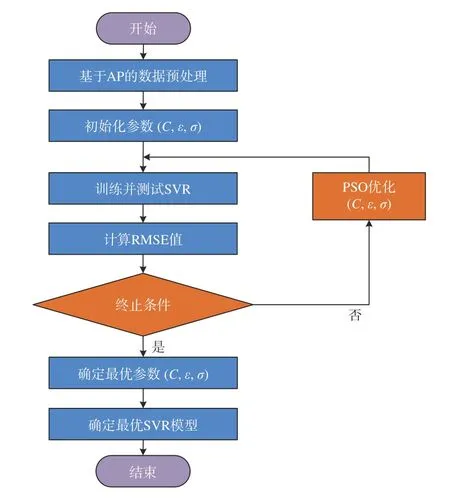
图2 PSO-ASVR 方法流程图Fig. 2 Flow chart of PSO-ASVR method
2 实验分析
本节首先基于三波长路面状态传感器开展路面状态定量标定实验,获取冰、雪和水3 种路面状态条件下的定量标定数据;然后开展标定数据处理方法对比实验,通过与传统拟合方法(PLS 和LS)对比,验证PSO-ASVR 方法在降低标定数据处理误差上的有效性。
2.1 路面状态定量标定实验
三波长路面状态传感器由光学系统、电路系统和云平台3 部分组成,其结构框图如图3 所示。光学系统包括光学镜头和光电探测器;电路系统包括激光驱动电路、光开关、继电器、I/V 转换电路、前置放大电路、锁相放大器、单片机模块、GPRS 模块;下位机数据通过GPRS 模块传输至云平台,云平台中内置LabVIEW 程序进行数据处理、存储和显示。
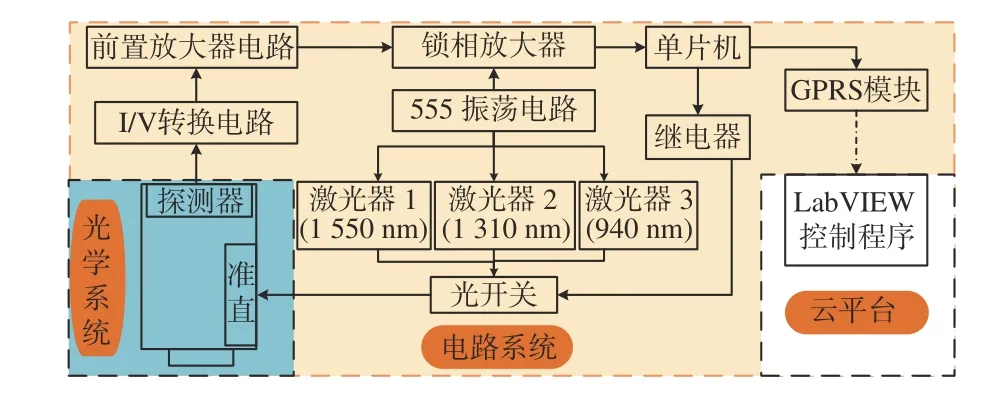
图3 传感器结构框图Fig. 3 Block diagram of sensor structure
基于三波长路面状态传感器开展路面状态定量标定实验时,被测路面状态为不同厚度的冰、雪和水,将其放置于铺有沥青层的容器中作为标准样本。其中,水为日常饮用且无杂质的自来水,雪为雪天后室外采集,冰由雪和水的混合物制成。传感器和标准样本实物图如图4 所示。传感器光学镜头前端距离标准样品150 mm,镜头光轴与标准样本角度设置为90°。其中,标准样本厚度和标定距离采用数显游标卡尺(BK-318, 标康) 和数显千分尺(0~25 mm 和25 mm~50 mm, SHSIWI)测量,标定角度采用数显角尺(JDC-200, 标康)测量。为保证测量一致性,所有实验都以相同方式进行。具体标定步骤如下:1) 测量标准样品响应和背景电压Vs、Vb;2) 计算标定电压V:V=Vs-Vb;3) 测量样品中冰、雪和水的厚度D;4) 基于PSOASVR 方法得到V-D拟合关系;5) 将拟合参数输入测量程序。

图4 传感器和标准样本实物图Fig. 4 Physical picture of sensor and standard samples
基于三波长路面状态传感器和标准样本获取的标定数据如图5 所示。由图5 可知,由于选用等间距的路面覆盖物厚度,该传感器的标定数据存在非线性和非均匀分布的问题。从标定的角度分析,标定数据中存在的测量误差主要分为传感器稳定性引起的电压测量误差以及标准样本形状非一致性(特别是冰)引起的厚度测量误差。

图5 标定数据Fig. 5 Diagram of calibration data
2.2 标定模型对比实验
为了验证PSO-ASVR 方法的优越性,将其与PLS 和LS 方法进行性能对比。按照2.1 节中的标定数据获取流程,测量了另一组数据作为验证数据,如图6 所示。
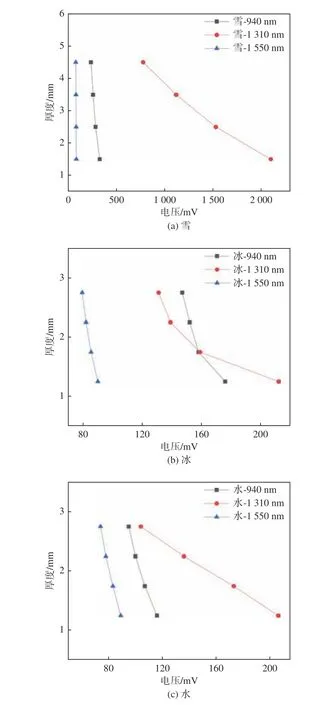
图6 测试数据Fig. 6 Diagram of test data
在对PSO-ASVR 方法进行训练时,PSO 算法参数设置为:c1=1.5,c2=1.7,ω =1, 粒子最大速度Vmax=5,种群规模sizepop=20,最大迭代次数为200。此外,LS 方法中多项式的阶数设置为3。针对测试数据,3 种方法得到的拟合误差δ 分别如图7、图8、图9 所示。

图7 最小二乘法得到的拟合误差δFig. 7 Fitting error δ obtained by least square method

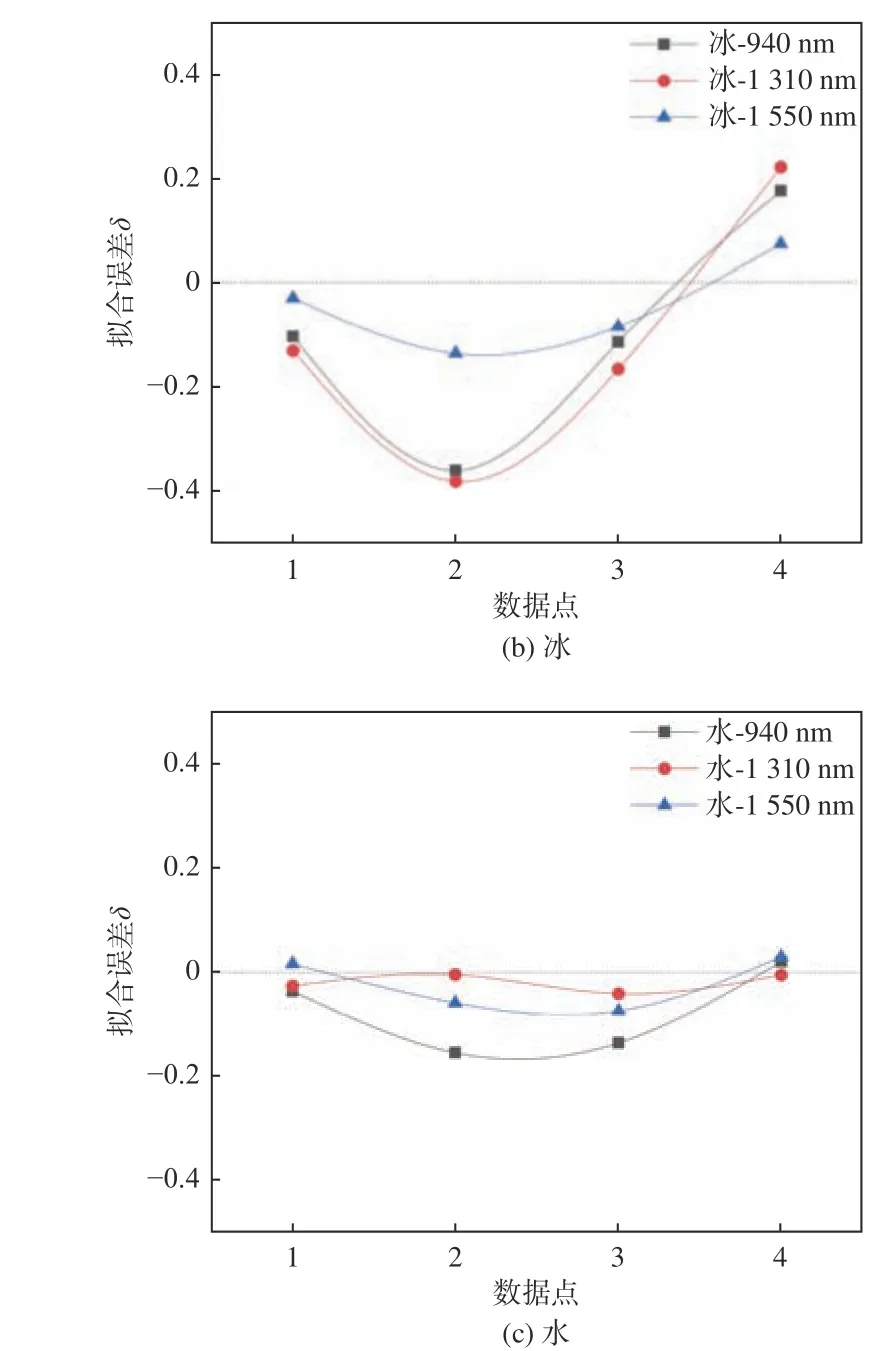
图8 偏最小二乘法得到的拟合误差δFig. 8 Fitting error δ obtained by partial least square method
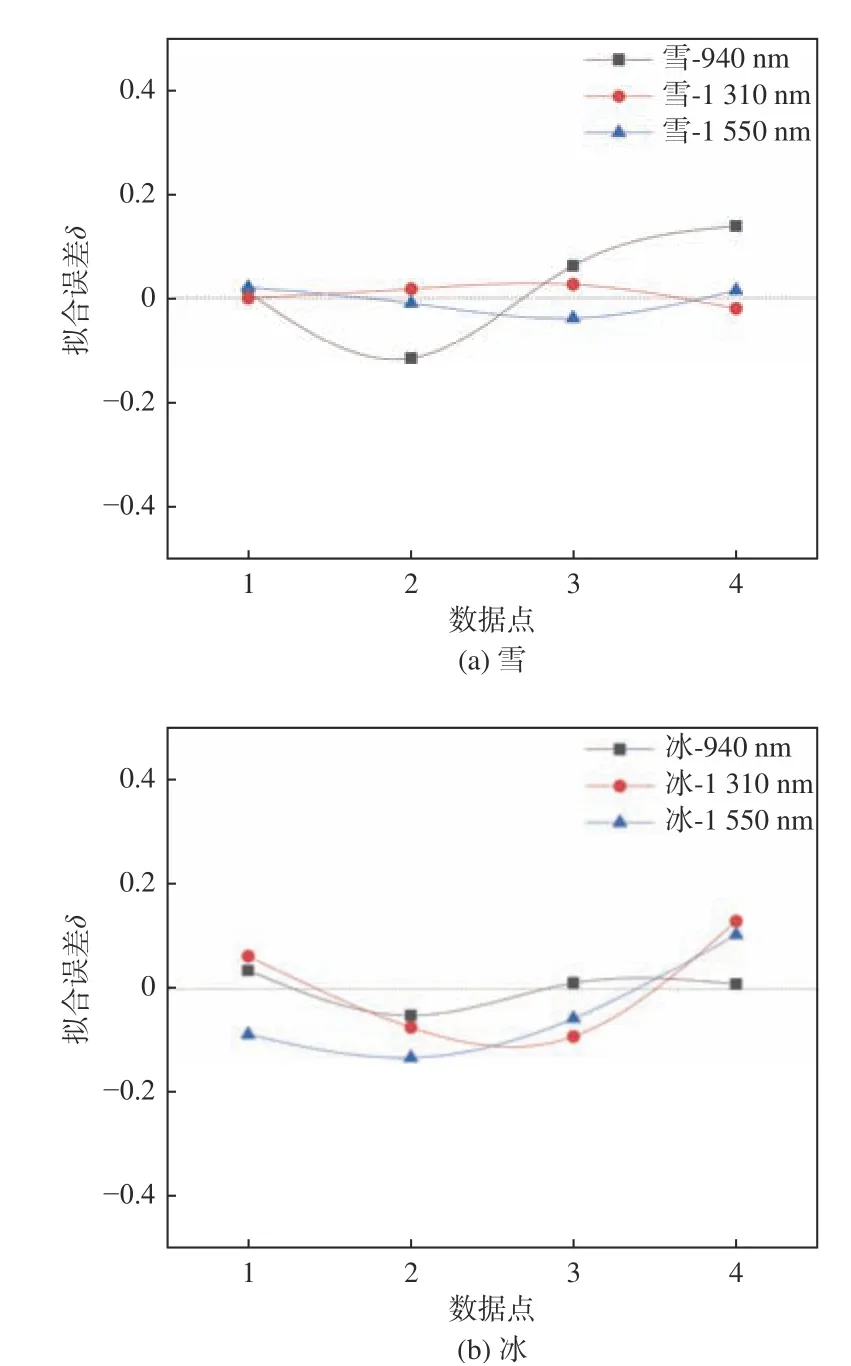
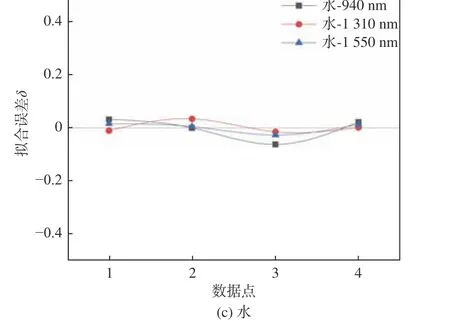
图9 粒子群优化自适应支持向量回归得到的拟合误差δFig. 9 Fitting error δ obtained by PSO-ASVR
由图7~图9 可知,3 种方法均出现了不同程度的振荡。其中LS 方法幅度最大,其次是PLS,最小的是PSO-ASVR,由此表明PSO-ASVR 方法可以有效降低标定数据拟合过程中存在的振荡问题。从算法对比的角度分析,除了标定过程中存在的测量误差外,验证数据和测试数据存在的重复性误差也是测量误差的来源之一,会直接影响不同算法的拟合效果和对比效果。
下面针对不同波长、不同路面状态和不同方法开展标定模型对比,以 δ为对比数据,以RMSE 为对比指标。表1 为针对不同波长的RMSE,即RMSE值根据某个波长和某个方法下对应于不同路面状态的 δ值计算所得,计算公式为公式(8),计算数据来源于图7~图9。
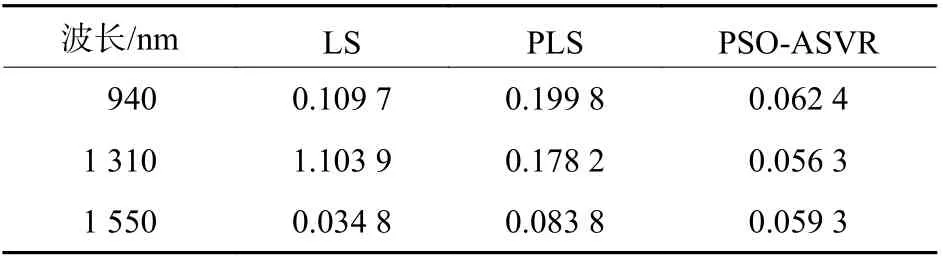
表1 针对不同波长的RMSETable 1 RMSE for different wavelengths
由表1可知,针对940 nm 和1 310 nm,PSO-ASVR方法的RMSE 低于PLS 和LS 方法,定量上至少可降低43%;针对1 550 nm,LS 方法的RMSE 最低,其次是PSO-ASVR 方法,PLS 方法最高。
表2 为针对不同路面状态的RMSE,即RMSE值根据某种路面状态和某个方法下对应于不同波长的 δ值计算所得,计算公式为公式(8),计算数据来源于图7~图9。由表2 可知,针对雪、冰、水3 种路面状态,PSO-ASVR 方法的RMSE 明显低于其他2 种方法,在定量测量上至少可降低62%。综合表1 和表2 可知,PSO-ASVR 方法性能更优越,且在针对不同路面状态的标定建模中优越性更明显。
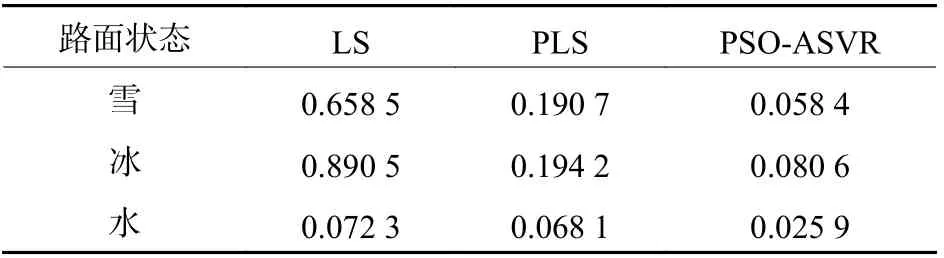
表2 针对不同路面状态的RMSETable 2 RMSE for different pavement states
表3 为针对不同方法的RMSE,即RMSE 值根据某个波长和某个路面状态下对应于不同方法的δ值计算所得,计算公式为公式(8),计算数据来源于图7~图9。由表3 可知,针对三波长路面状态传感器的测试数据, PSO-ASVR 方法在LS 方法基础上RMSE 值减小了91%,在PLS 方法基础上RMSE值减小了63%,验证了PSO-ASVR 方法在三波长路面状态传感器标定建模中的优越性。

表3 针对不同方法的RMSETable 3 RMSE for different methods
3 结论
为降低路面状态传感器定量标定误差,本文提出了一种基于PSO-ASVR 的三波长路面状态传感器标定模型。首先建立了AP 流程,并融合PSO 算法和SVR 算法,提出了一种基于PSO-ASVR 的标定数据处理方法;然后,基于三波长路面状态传感器开展了冰、雪、水3 种路面状态的定量标定实验;最后,开展了PSO-ASVR 方法与传统方法的对比实验。实验结果表明,PSO-ASVR 方法在面对标定数据非线性和非均匀分布问题时数据处理效果更好,相比于LS 和PLS 方法在RMSE 上至少可减小63%,实现了传感器定量标定误差的降低。
猜你喜欢
特产研究(2022年6期)2023-01-17 05:06:16
世界科学技术-中医药现代化(2020年2期)2020-07-25 02:06:06
汽车维修与保养(2020年11期)2020-06-09 05:42:16
中成药(2018年12期)2018-12-29 12:25:44
实用口腔医学杂志(2017年6期)2017-09-19 02:51:28
中成药(2017年6期)2017-06-13 07:30:35
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年3期)2016-11-07 09:03:34
中国照明(2016年4期)2016-05-17 06:16:15
医学研究杂志(2015年4期)2015-06-10 06:42:43
