
MEC中RIS辅助的无人机轨迹和计算策略联合优化
2023-02-18 01:40刘昊洋杨金松孙三山熊有志
无线电工程 2023年1期
刘昊洋,杨金松,孙三山,2*,熊有志,刘 莉
(1.四川师范大学 物理与电子工程学院,四川 成都 610101; 2.电子科技大学 通信抗干扰技术国家级重点实验室,四川 成都 611731)
0 引言
传统移动边缘计算(Mobile Edge Computing,MEC)系统通常利用无线通信网络的基站充当边缘节点服务器,为用户提供通信和计算服务。在B5G/6G网络中,为了增强站点部署的灵活性和提高边缘计算节点的资源分配弹性,无人机(Unmanned Aerial Vehicle,UAV)开始作为移动性的边缘节点为地面终端(Ground Terminal,GT)提供MEC服务[1]。
已有大量研究关注UAV和GT间的计算服务时延保障[2-7],主要通过优化UAV的轨迹、带宽和缓存资源分配,以及边缘计算时的任务卸载策略来保证服务时延约束。为了改善UAV移动过程中遭遇障碍物而导致的无线传输性能下降问题,文献[8]提出利用可重构智能表面(Reconfigurable Intelligent Surface,RIS)来改善无线信道条件。文献[9]进一步在MEC系统的UAV轨迹优化时考虑了RIS的最优相位控制。尽管RIS可以通过编程改变入射电磁波的传播特性,提高无线通信的信道质量[10-11],但是在辅助UAV提供MEC服务时,将不可避免地带来UAV轨迹变化与RIS相位调控的协作开销。
本文通过优化UAV在三维空间上的轨迹,提高UAV的电磁波反射自由度,在RIS相位调控参数确定的情况下,寻找UAV与RIS之间、RIS与GT之间的最优信道,联合计算策略的优化,使MEC系统的服务能耗最小。
1 系统模型
系统模型示意如图1所示。假设某个GT沿一条道路随机行进,其初始位置和终点位置确定。GT行进过程中总计与UAV通信K次,每次通信的位置点用GTk表示。同时,行进的环境中包含多个不同高度的建筑物,其中一个建筑物上竖直装配有多个相同面积的RIS,每个RIS又包含M个反射单元。一台可悬停的旋翼UAV在GT行进过程中为其提供MEC服务。
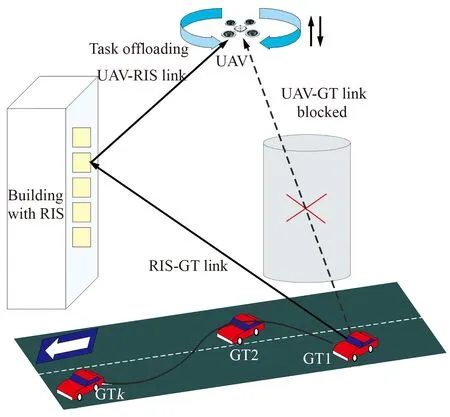
图1 系统模型示意Fig.1 The schematic diagram of system model
1.1 UAV的运动模型和GT的业务模型

由于UAV是根据GT的运动情况提供MEC服务,因此不需要对GT做轨迹规划。GT的运动模型可以表示为GT与UAV通信时在时间维度上按先后顺序产生的轨迹点集合,即≜{GT1,GT2,…,GTK},并用wk=(xk,yk)表示每个GT轨迹点的水平坐标。考虑到UAV轨迹优化的离散程度一般比GT高,假设GT轨迹点的个数与UAV的轨迹点个数满足K≪N,因此GT在与UAV通信时认为保持静止。为了后续描述方便,将K个轨迹点定义为位置固定的K个虚拟GT站点,用Uk=(Fk,Dk,Tk)表示第k个GT在位置点上的计算任务请求,其中Fk表示计算任务的CPU周期数量;Dk表示通过上行传输的任务数据量;Tk表示任务的完成时间。考虑到MEC系统下行传输的计算结果数据量一般远小于上行传输数据量,对服务能耗和UAV轨迹影响较小,因此本文未考虑下行传输的情况。
1.2 UAV推进能耗模型
UAV单位时间的推进能耗取决于UAV的水平速度和垂直速度[15],因此旋翼UAV在每个轨迹段的推进能耗可以表示为:

(1)
式中,P0,P1分别表示悬停状态下的叶片外形功率和感应功率;P2为UAV下降/上升功率的常数;Utip为转子叶片的尖端速度;v0为悬停时的平均转子诱导速度;d0,s分别为机身阻力比和转子坚固度;ρ,G分别为空气密度和转子盘面积。因此,UAV完成一次服务所产生的推进能耗为:
(2)
1.3 UAV,RIS和GT的通信模型
为了改善UAV和GT通信的无线环境,利用装配在建筑物上的多个RIS来重定向UAV和GT之间的信号。I个RIS垂直排列在同一水平位置,确保UAV-RIS和RIS-GT间的链路都在视距(Line of Sight,LoS)连接中。每个RIS由M个反射单元来形成一个均匀的线性阵列,每个单元的水平坐标用wr=(xr,yr)表示,在垂直方向上的高度用zr,r∈{1,2,…,I}表示。
用θmn∈[0,2π),m∈={1,2,…,M}表示在UAV第n轨迹段的第m个反射单元的相位,因此Φn=diag{ejθ1n,ejθ2n,…,ejθMn}是轨迹段n处的反射单元的相位阵列[8],因此UAV-RIS链路在第n个轨迹段的信道增益为:
(3)

类似地,RIS到第k个GT的信道增益为:
(4)

(5)



1/(1+a*exp(-b(arctan(hn/dkn)-a))),
(6)


(7)
rkn=Blb(1+pkgkn/Bσ2),
(8)
式中,pk为GT对UAV的固定发射功率;B为带宽;σ2为噪声方差。
1.4 任务卸荷及缓存策略
Uk的计算时延Lk受任务卸荷影响[16],表示为:
(9)
于是,UAV和GT执行任务Uk时的能耗可以表示为:
(10)
(11)

在进行任务卸荷的同时,还需要考虑任务数据的缓存。如果任务被缓存在UAV上,GT则不需要传输数据[5,17]。因此,式(9)~式(11)可以整合为:
(12)
(13)

2 服务能耗最小化问题及求解
2.1 服务能耗的最小化问题
UAV在为GT提供MEC服务时,其轨迹将随GT位置的变化而动态调整,由此带来自身推进能耗的变化。同时,在利用RIS辅助UAV改善无线信道的前提下,UAV轨迹点的变化也带来了UAV,RIS和GT三者间不同的通信状态和质量,使MEC系统的服务能力改变。因此,本文将MEC系统总的服务能耗作为研究目标,通过优化UAV的轨迹点和MEC系统的计算策略来达到服务能耗最小的目的[18]。因此,MEC系统的服务能耗最小化问题可表示为:
(14)
s.t. 0≤ak≤1, 0≤xk≤1,∀k,
(15)
(16)
(17)
(18)
(q1,h1)=(qN+1,hN+1),
(19)
(20)
(21)
hmin≤hn≤hmax,∀n,
(22)
(23)

2.2 服务能耗最小化问题的求解
原始的服务能耗最小化是一个非凸的联合优化问题,可以利用连续凸逼近的方法[19],将问题P分解为多个凸的子问题。基于分解得到的子问题,本文设计了一个迭代算法使最后的解收敛到一个预设精度,从而返回最优解Q*,H*,A*,X*,C*。
2.2.1 任务卸荷及缓存策略的优化求解
在固定变量Q,H,C的情况下,将P转化为跟A和X有关的2个子问题P 1和P 2:
(24)
(25)

2.2.2 UAV轨迹点的优化求解
首先进行水平轨迹的优化,在H,A,X,C固定的情况下,问题P可以转化为
(26)
(27)
(28)

(29)

(30)
由此,可以将问题P 3简化为:
(31)
s.t. (29),(30),
(32)
式中,松弛变量0<ε<1。式(29)表示UAV-GT链路必须达到由ε协调的一定水平的数据传输速率。问题P 4是一个凸问题,可以直接由CVX工具解决。
进行垂直轨迹的优化,在固定Q,A,X,C的情况下,垂直轨迹H的优化问题表示为:
(33)
(34)


(35)


显然,在变换得到新的约束条件后,P 5通过优化UAV垂直轨迹使‖hn+1-hn‖→0,∀n,从而最小化垂直方向上的推进能耗,同时也保证UAV-GT的上行链路达到一定的数据速率。至此,P 5变成凸问题,可以通过CVX工具直接解决。
2.2.3 RIS辅助服务策略的优化求解
在Q,H,A,X固定的情况下,问题P可以改写成:
s.t. (23),(27)。
(36)
P 6是为了实现GT具备最大的最小数据传输速率。假设RIS在轨迹段n处服务于第k个GT,即ckn=1,式(5)可以进一步表示为:
(37)
将式(24)带入式(8),且只考虑NLoS连接,式(27)的左侧可以改写为:
(38)

(39)
(40)
式中,δ为松弛变量。显然,可以用线性规划工具求解P7得到C,从而得到各个RIS的NLoS连接的信道增益,选择最优的RIS来辅助系统工作。
2.3 整体算法实现
基于服务能耗的最小化问题的子分问题分解,通过迭代算法求得最优的轨迹规划和计算策略,设计如下。
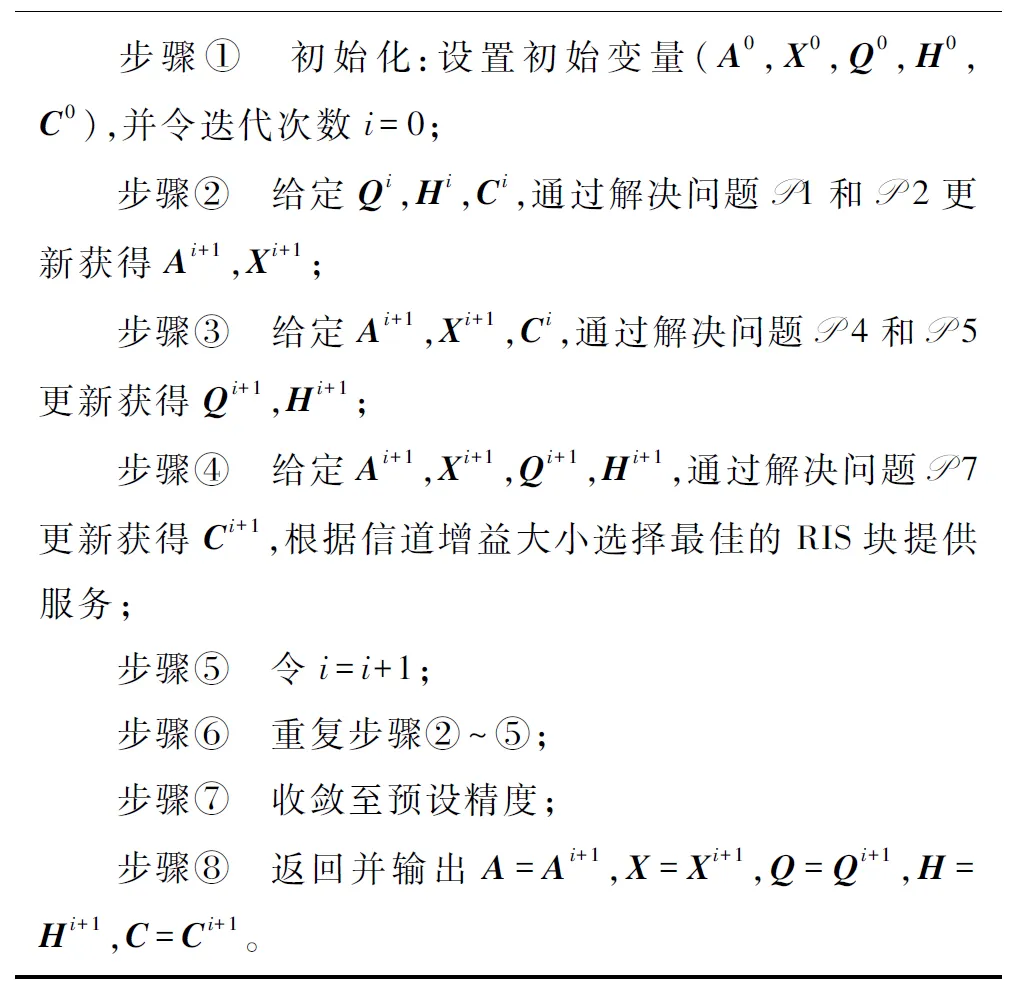
算法:RIS辅助的UAV轨迹和计算策略优化的迭代求解 步骤① 初始化:设置初始变量(A0,X0,Q0,H0,C0),并令迭代次数i=0;步骤② 给定Qi,Hi,Ci,通过解决问题P1和P2更新获得Ai+1,Xi+1;步骤③ 给定Ai+1,Xi+1,Ci,通过解决问题P4和P5更新获得Qi+1,Hi+1;步骤④ 给定Ai+1,Xi+1,Qi+1,Hi+1,通过解决问题P7更新获得Ci+1,根据信道增益大小选择最佳的RIS块提供服务;步骤⑤ 令i=i+1;步骤⑥ 重复步骤②~⑤;步骤⑦ 收敛至预设精度;步骤⑧ 返回并输出A=Ai+1,X=Xi+1,Q=Qi+1,H=Hi+1,C=Ci+1。
3 仿真与结果分析
通过Matlab仿真验证了所提方案的有效性。将所提方案(Proposed Solution)与初始方案(Initial Solution)、基准测试方案(Benchmark Solution)进行了UAV的轨迹对比和系统服务能耗对比。初始方案不进行轨迹优化,采用固定的椭圆轨迹。基准测试解决方案不进行RIS辅助,不考虑GT任务的缓存和动态卸载,同时要求GT必须将任务卸荷至UAV。设置RIS数为3,相位单元数M=100,初始高度H=100 m,其余仿真参数参照文献[9]提供的典型值进行了设置。
UAV的水平轨迹和三维轨迹对比如图2所示。由图2(a)可以看出,与基准方案相比,所提方案在水平方向上的投影面积最小,在UAV保持恒定速度进行飞行时,效率最高。由图2(b)可以看出,UAV从起始位置的高度开始下降,接近GT从而获得更好的链路质量。

(a) UAV水平轨迹

(b) UAV三维轨迹图2 不同坐标体系下的UAV轨迹对比Fig.2 Comparison of UAV trajectories in different coordinates
UAV的推进能耗如图3所示,该图呈现了UAV水平推进能耗的累积分布函数,可以看出所提方案与基准方案基本一致。

图3 UAV的推进能耗Fig.3 The energy consumption on UAV propulsion
UAV-GT的数据速率对比如图4所示。由图4可以看出,所提方案使得UAV对GT具有最高的数据传输速率,并且基准方案的数据传输速率也明显优于初始方案,证明了轨迹优化可以改善无线传输链路,带来通信质量的明显提高。

图4 UAV-GT的数据速率对比Fig.4 UAV-GT data rate comparison
系统服务能耗分析如图5所示。由图5(a)可以看出,在GT的各位置处,经RIS辅助的所提方案与初始方案在服务能耗方面比无RIS辅助的基准方案有明显的节能优势。图5(b)展现了三者在总服务能耗上的显著差距,验证了RIS在辅助UAV提供MEC服务时具有节能优势。

(a) 各GT位置处的服务能耗

(b) 累计服务能耗图5 系统服务能耗分析Fig.5 The analysis of system energy consumption on service
累计服务能效(即数据速率与总服务能耗的比值)如图6所示。可以看出,所提方案的性能最佳,能够通过轨迹优化和RIS辅助改善无线信道质量,并带来服务能耗上的大幅降低。

图6 累计服务能效Fig.6 The cumulative energy efficiency on service
4 结束语
本文提出了一种RIS辅助的UAV轨迹和计算策略联合优化方案,解决UAV赋能的MEC系统服务能耗最小化问题。利用连续凸逼近的方法,将原问题进行了子问题分解,并利用迭代算法求得最优解。在验证方案有效性的仿真实验中,多项数值结果表明,所提方案能够节省UAV推进与系统服务2方面的能耗,并使计算任务的数据传输速率得到明显提高。
猜你喜欢
昆钢科技(2022年2期)2022-07-08
当代水产(2021年10期)2022-01-12
建材发展导向(2021年23期)2021-03-08
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
华人时刊(2018年15期)2018-11-10
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
系统工程与电子技术(2016年7期)2016-08-21
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
