基于一维声栅共振场的大规模微粒并行排列的实验研究*
2023-02-18 06:37齐绍富蔡飞燕田振黄先玉5周娟王金萍李文成郑海荣邓科
物理学报 2023年2期
齐绍富 蔡飞燕 田振 黄先玉5) 周娟 王金萍 李文成 郑海荣 邓科
1) (吉首大学信息科学与工程学院,吉首 416000)
2) (吉首大学物理与机电工程学院,吉首 416000)
3) (中国科学院深圳先进技术研究院,劳特伯生物医学成像研究中心,深圳 518055)
4) (湖南医药学院医学院,怀化 418000)
5) (绥宁县第一中学,邵阳 422699)
声操控微粒技术可以非接触无损伤地控制声场中的物体运动,其在精密制造、材料工程、体外诊断等领域具有广阔的应用前景.传统声操控微粒技术一般采用自由声场,如利用单个换能器或阵列换能器产生的聚焦声场、行波场或驻波场等.然而,一般单个换能器产生的声场仅能操控单个微粒;而阵列换能器的驱动系统复杂,导致操控器件成本高昂且难以微型化;因此,亟需研究新的声场形态实现多样性微粒操控.本工作中,采用单个换能器产生的平面波激发一维声栅的共振声场,实验实现了大规模泡沫微球的周期排列操控.其操控机制是由于声栅狭缝中法布里-珀罗谐振声场与声栅表面周期衍射场共振耦合,在声栅表面形成周期分布的局域梯度声场,导致微粒在平行于声栅表面受到声捕获力,在垂直于声栅表面受到指向表面的声吸引力,实现了微粒周期排列在声栅表面上.该工作为利用超声在空气中大规模排列微粒提供了理论基础和技术支持.
1 引言
声操控微粒是利用声辐射力捕获、操纵和移动微小颗粒的一项技术.其中声辐射力是由于处于声场中的微粒对声波的散射、吸收等导致声场携带的动量在声场与微粒之间交换产生[1,2].声操控微粒技术具有非接触、无损伤、可穿透非透明介质等优点,在精密制造、材料工程、体外诊断等领域具有广阔应用前景[3−8].
传统声操控微粒技术一般是基于单个换能器或者换能器阵列产生的自由声场进行微粒操控.其中单个换能器与全反射面形成的驻波可以实现微粒的停驻,但难以个性化操控微粒;面阵换能器可以实现微粒的任意运动,但其驱动电路系统复杂,导致操控器件成本高昂且难以微型化.近期,声人工结构可以构建特定的调制声场实现微粒的个性化操控,引起了人们的极大兴趣,如: Li 等[9,10]利用声子晶体板的周期结构共振激励板子零阶非对称Lamb 波模式,获得周期梯度局域强场,实现水中大规模微粒的捕获、筛选和移动;Melde 等[11]设计全息板结构实现水表面轻软微粒的任意形态排列;Memoli 等[12]利用超材料阵列调控相位空间分布获得瓶形声场分布并实现空气中微粒的捕获.由于调制声场可以通过单阵元换能器与人工结构结合产生,该装置简单易集成,展现了优越的实用性.因此,需要研究更多可用于微粒操控的人工声场,实现微粒的个性化操控.
在本工作中,基于前期理论研究微粒在一维声栅表面的受力特征[13],构建了空气中的一维声栅系统,并实验观察到泡沫微球在声栅表面周期排列.首先探讨了声栅表面的共振声场特征;接着,研究了微粒在共振声场中受到的声辐射力特征,发现微粒在平行于声栅表面受到捕获力,在垂直于声栅表面受到指向表面的吸引力;进一步,制备声栅样品并搭建实验平台,实现了泡沫微球在声栅表面的周期排列操控.该工作为空气中大规模并行操控微粒提供了实验基础.
2 理论模拟
2.1 声栅共振声场特征分析
我们研究的声栅是由钢板刻蚀周期分布的狭缝构成,该声栅结构放置在空气中.为了便于观察,选取了声栅三个周期结构作为计算单元,如图1(a)所示,其中钢板的厚度t=6.25 mm,狭缝宽度c=1 mm,狭缝周期为d=8.34 mm .被操控的泡沫球微粒放置在声栅表面,其半径约为r=0.5 mm .材料的声学参数 [14]如表1 所列.

表1 材料声学参数Table 1.Material acoustic parameters.
采用 COMSOL Multiphysics®软件 [15]模拟声栅的声场特征.计算模型采用压力声学和固体力学模块,研究类型采用频域模块;左右边界采用周期性边界条件,用于模拟模型周期结构;上下边界采用平面波辐射边界条件,用于模拟开放空间;下边界设置为平面波入射声场,入射方向是从底面向上激发;泡沫球位于声栅上表面,其位置坐标如图1(a)所示.图1(b)展示了声栅系统的声透射谱,可以看到在38—41 kHz 之间,有一个透射增强峰,该频率约为39.6 kHz;图1(c)展示了系统在该共振频率点的声场分布,为了对比声场特征;图1(d)展示了系统在非共振频率38 kHz 时的声场分布,其中红色和蓝色分别代表声压的极大值和极小值,声场强度用最大值归一化.对比共振频率和非共振频率的声场特征,可以看到在共振频率处,声栅表面声场得到了极大增强;而且在共振频率处,声场除了局域在狭缝里,在栅格表面也存在有梯度分布;在一个周期栅格表面有两个零值声压[16].该共振声场是由于声栅表面激发的衍射波与狭缝内部的法布里-珀罗谐振腔共振后两者发生耦合产生[13,17].

图1 声栅样品示意图与归一化透射谱,以及一维声栅归一化声压分布图 (a) 声栅样品示意图;(b) 平面波透过声栅样品的透射谱;(c) 共振频率为39.6 kHz 时声场分布图;(d) 非共振频率为38 kHz 时声场分布图Fig.1.Schematic diagram of the grating sample with normalized transmission spectrum,and normalized sound pressure distribution of the 1D grating: (a) Schematic diagram of the grating sample;(b) transmission spectrum of the plane wave through the grating sample;(c) the pressure field at resonant frequency of 39.6 kHz;(d) the pressure field at off resonant frequency of 38 kHz.
2.2 微球在声栅表面所受声辐射力特征分析
声栅结构的共振耦合导致其表面产生了周期分布局域声场,该局域声场可以用于操控微粒的运动.在本实验中,拟操控泡沫微球半径约r=0.5mm,工作频率位于约39.6 kHz,可以计算得出kr≈0.37.虽然kr ≈0.37接近引起Mie 散射的频率范围,但由于微球的声阻抗远大于空气的声阻抗,在该频率处没有引起微球共振导致的反常声辐射力产生.因此,可以用Gor’kov 理论近似模拟颗粒在声场中受到的声辐射力[18,19].该声辐射力的表达式如下:

其中U为空间声场能量势,可以表示为
为了进一步了解泡沫球在共振频率下声栅表面所受的声辐射力特征,展示了计算获得的声栅表面泡沫球在共振频率39.6 kHz 时所受归一化声辐射力空间分布,如图2 所示;其中图2(a)颜色表示声辐射力大小,箭头表示声辐射力方向;图2(b)是泡沫球离声栅Z方向0.24d处,X方向和Z方向的声辐射力Fx,Fz与 ∆X的关系,其中 ∆X的变化范围是–0.5d到0.5d.从图2(a)可以看出,泡沫球在声栅表面受到的声辐射力呈周期变化,当泡沫球逐渐靠近声栅表面,所受声辐射力逐渐增大.从图2(b)可以看出,在声栅表面处,微粒在水平X方向一个周期内有三个零值点,坐标分别为–0.25d,0,0.25d,在三个零值点中,–0.25d和0.25d两点微粒受到的是捕获力,微粒可以稳定停驻,0 点是非稳态停住点[20].从图2 可以进一步得出,在–0.25d和0.25d两点处,微粒受到垂直Z方向的力是负的[13,21];即与波传播方向相反,指向板面方向.因此,从理论分析结果可以看出,微粒能够在一个栅格周期内稳定吸附在–0.25d和0.25d两个位置处.
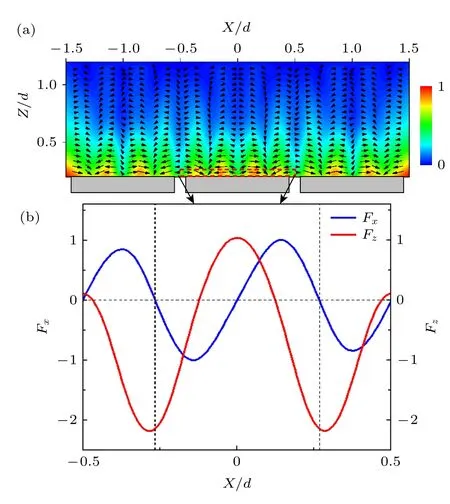
图2 泡沫球位置变化在X方向上从–1.5d到1.5d,在Z方向上从0.24d 到1.2d,半径约为 r=0.5 mm 的泡沫球在一维声栅上所受归一化声辐射力空间分布图 (a) 黑色三角形箭头表示声辐射力所指方向,颜色深浅表示声辐射力的大小,灰色矩形表示一维声栅;(b) X 方向上泡沫球位置变化从–0.5d 到0.5d 的归一化声辐射力Fx (蓝色实线)与Fz (红色实线)曲线图Fig.2.Spatial distribution of the normalized acoustic radiation force on a one-dimensional sound grid for a foam sphere with a radius of about r=0.5 mm varying from–1.5d to 1.5d in the X-direction and from 0.24d to 1.2d in the Z-direction: (a) The black triangle arrow indicates the direction of the acoustic radiation force,the color shade indicates the size of the acoustic radiation force,and the gray rectangle indicates the one-dimensional acoustic grid;(b) plot of normalized acoustic radiation force Fx (blue solid line)versus Fz (red solid line) for the change in position of the foam sphere from–0.5d to 0.5d in the X-direction.
3 实验观察
我们搭建的声操控微粒实验平台如图3 所示.中心频率为40 kHz 的空气声换能器连接功率放大器和信号发生器;不锈钢声栅结构通过模具加工制备,放置在换能器上方;泡沫微球任意排布在声栅表面;摄像机放置在声栅顶面用于观察实验现象.

图3 声辐射力操控实验平台示意图Fig.3.Schematic diagram of acoustic radiation force manipulation experimental platform.
图4 展示了超声换能器关闭和开启时的排列实验效果图.实验录制的视频在附件中,其中截取的瞬时图片如图4 所示.从图4(a)可以看到,未开启超声时,声栅结构表面泡沫球微粒都是随机放置;图4(b)可以看到开启超声后,且声场频率为39.6 kHz时,泡沫球在每个声栅表面整齐地排成两列,其排列的位置是位于离狭缝–0.25d和0.25d处,获得了与理论分析一致的结果.
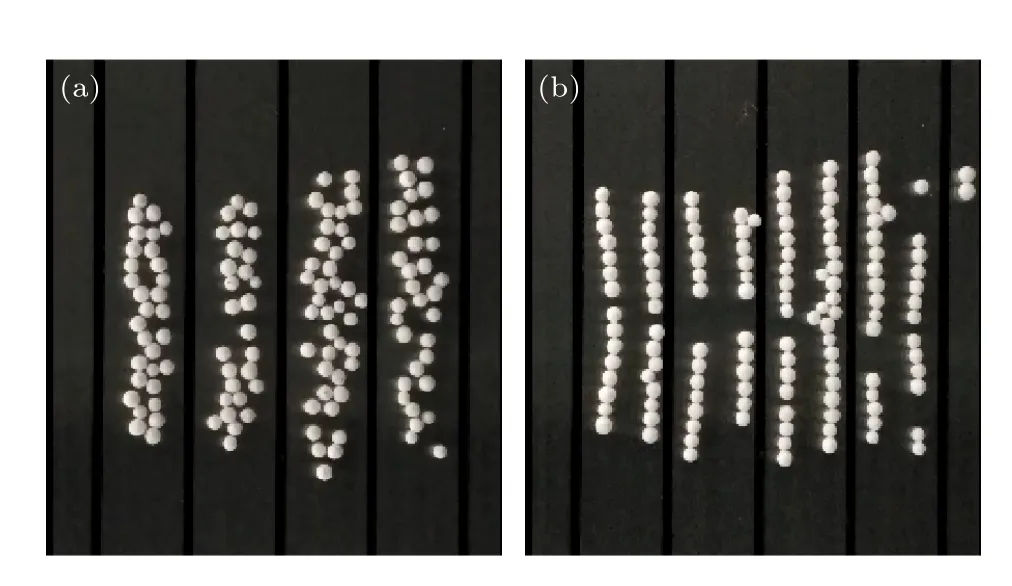
图4 泡沫球操控实验效果图 (a) 超声开启前泡沫球分布图;(b) 超声开启后泡沫球排列图Fig.4.Experimental effect of foam ball manipulation:(a) Distribution of foam balls before ultrasonic opening;(b) arrangement of foam balls after ultrasonic opening.
4 结论
本文在实验上实现了基于一维声栅共振场的大规模微粒周期排列操控.其主要的物理机制是由于平面声场激励声栅产生共振,导致声栅狭缝内部的法布里-珀罗谐振声场与表面的衍射声场共振耦合,在声栅表面产生周期分布的局域梯度声场,使得声栅表面微粒受到平行于声栅表面的捕获力和垂直于声栅表面的吸引力,从而获得周期排列操控.我们的实验结果与有限元理论模拟结果一致.由于声栅结构简单易加工,无需复杂大规模电路装置就可以实现周期分布的局域梯度声场,该工作为大规模操控微粒提供了一种简单易行的方法.
猜你喜欢
海洋信息技术与应用(2020年1期)2020-06-11
苏州科技大学学报(自然科学版)(2020年1期)2020-04-13
铁道通信信号(2020年12期)2020-03-29
邵阳学院学报(自然科学版)(2019年4期)2019-08-29
家庭影院技术(2018年11期)2019-01-21
振动工程学报(2017年1期)2017-04-21
中国当代医药(2015年21期)2015-03-01
振动工程学报(2014年2期)2014-03-01
舰船电子工程(2013年4期)2013-07-11