一种新型单臂单孔微创腹腔镜手术机器人系统
2023-02-12 15:12王家寅姜乃晶赵亚平别良伟陈亮亮张齐铭朱祥何超
中国医疗器械杂志 2023年1期
【作 者】 王家寅,姜乃晶,赵亚平,别良伟,陈亮亮,张齐铭,朱祥,何超
1 上海微创医疗机器人(集团)股份有限公司,上海市,200031
2 同济大学 电子信息工程学院,上海市,201804
0 引言
20世纪80年代,微创外科手术逐渐兴起。相较于传统手术,该术式仅需几个小型切口,通过在切口内插入内窥镜与腔镜手术工具完成手术,具有恢复速度快、术中出血少、减少术后并发症的优势[1]。然而,微创外科手术对术者的操作要求高,增加了学习成本与手术风险。为此,使用机器人遥操作进行手术的方式应运而生。1999年,美国直觉外科(Intuitive Surgical)公司研发的Da Vinci多孔手术机器人IS1000面世。截至2022年2月,该系列已推出五代产品,在全球67个国家装机量超6730台,涵盖普外科、泌尿外科、心血管外科、胸外科、妇产科、五官科等多种手术术式[2]。继其成功商业化后,单孔手术因创伤小、失血少、恢复快的优点,成为新时代外科微创手术机器人的攻坚方向[3-6]。
早期的单孔机器人主要采用多臂单孔的形式[7-10]。手术一般是在Da Vinci Si系统或X i 系统的基础上,通过 筷子法 器械布局,使用单孔穿刺器执行单孔机器人手术。图1(a)~(c)分别展示了这种方案的器械布局、穿刺器和手术系统。然而,这种方案存在诸多缺点:①仪器的插入角度使得手腕关节的活动范围受限;②多臂之间拥挤的布局加大了各臂相互碰撞的可能性,降低了手术的安全性和流畅度;③多臂在单孔的展开空间需求较大,助手医生难以执行辅助操作。Da Vinci single site手术系统在一定程度上解决了上述问题,如图1(d)所示。在该系统中,操作臂的数量减少为3臂,使用图1(e)中的穿刺器进行单孔手术[11]。该穿刺器的最大特点是呈现弯曲状结构,通过插入特制的半刚(semi-rigid)器械实现腕部关节可动的增强。然而,虽然减少1条操作臂缓解了臂碰撞与助手医生难以操作的问题,却限制了可用的术式。同时,半刚器械的引入虽然缓解了腕部关节可动的局限性,但降低了器械的整体刚度,使得术中的操作准确性降低。为了从根源上解除上述问题,需要使用单臂单孔的部署方案,如图1(f)所示的Da Vinci single port(SP)系统。在该系统中,配备了具有肘关节和腕关节的器械,共4个器械臂,对单孔手术进行了有针对性的设计。从系统的发展来看,机器人单孔手术正逐渐从多臂单孔向单臂单孔发展。作为单臂单孔系统代表的Da Vinci SP系统在该领域处于垄断地位,其高昂的售价限制了它的广泛应用,目前尚未进入我国市场,仅在北京301医院有1台试用样机[12]。
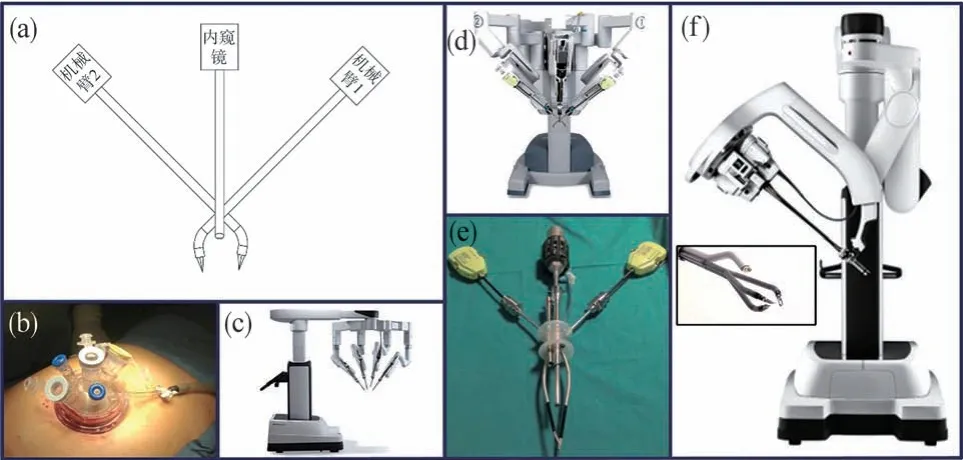
图1 单孔手术机器人Fig.1 Single port surgical robots
除高昂的价格,Da Vinci SP系统也存在诸多不足[13]:①通过丝传动构造调整臂不动点,需要定期拆机维护,以防止丝传动机构的松脱;②内窥镜采用柔性设计,不支持刚性内窥镜,经过消杀后只能使用数十次,进一步增加了使用成本;③控制精度需要进一步提升;④力反馈技术尚不成熟。随着机器人单孔手术需求的逐渐增加,亟须具有自主知识产权的国产单臂单孔手术机器人对以上几项问题进行突破与改进。我们设计了一种新型单臂单孔微创腹腔镜手术机器人系统。在硬件上,它通过C形臂实现了不动点,避免了频繁的定期拆机维护;除柔性内窥镜外也支持刚性内窥镜,显著降低了器械耗材成本。在控制系统上,通过修正器械控制参数实现了高精度控制;通过电机输出力矩对器械受到的外力进行估计,结合器械边界力反馈和运动速度,实现力反馈功能。
1 新型单臂单孔微创腹腔镜手术机器人系统
新型单臂单孔微创腹腔镜手术机器人系统由医生控制台、图像台车和患者台车组成,如图2所示。术中,术者依据图像台车传输的影像,通过操作医生控制台处的主控制臂以遥操作的方式控制患者台车处的器械。
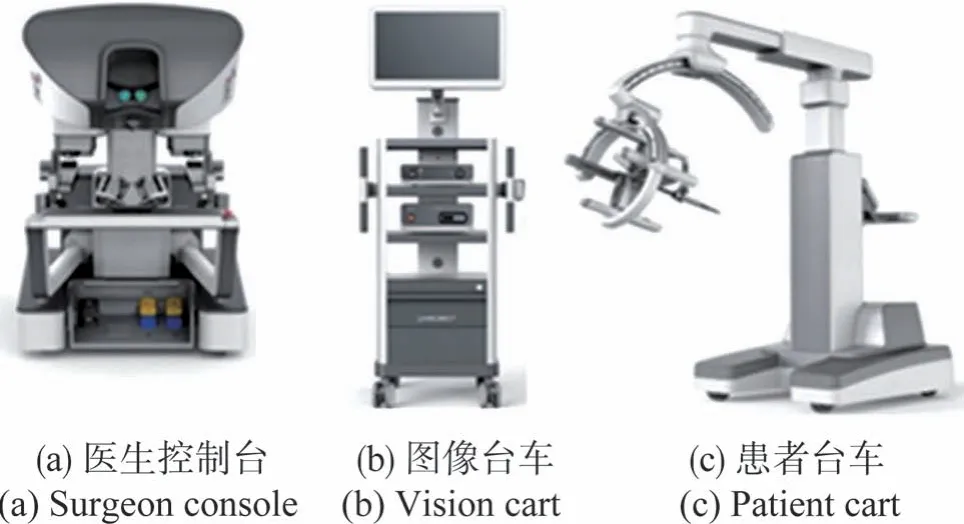
图2 新型单臂单孔微创腹腔镜手术机器人系统Fig.2 A single-arm single-port micro-traumatic laparoscopic robotic surgical system
医生控制台是内窥镜手术系统的控制中心,主要由主控制臂、脚踏开关、立体监视器3个部分组成。一个医生控制台安装有2个主控制臂,分别接收操作者左手和右手的操作信号。术中,医生控制台的术者坐在无菌区域外,通过操作主控制臂末端的控制手柄来控制器械工具臂、手术器械和三维电子弯管内窥镜。台车上安装的脚踏开关可帮助术者完成电切、电凝等电外科设备的相关操作控制。立体监视器是术者观察病灶及手术器械在患者体内运动的最主要的装置,术者头部须进入立体监视器的观察窗位置,并且通过2个视窗的目镜进行图像观察。立体监视器通过立体成像原理设计成像光路,使得术者通过观察窗上的2个观察孔观看到的图像呈立体效果。
图像台车将三维电子内窥镜采集的图像传送至医生控制台立体成像仪中,使术者在手术过程中能够看到患者体内的立体图像,同时图像也会在图像台车的顶部显示屏上显示,以方便床边助手对内窥镜影像进行查看。
患者台车是腹腔内窥镜手术系统位于患者手术床边的直接操作子系统。拥有4条平行布置的器械臂,其中1条臂须使用内窥镜,另外3条臂可使用不同的手术器械。4条器械臂可通过调整臂进行整体调整。调整臂共有6个自由度,其中远离基座的3个自由度均为转动自由度,三轴轴线重合于不动点。靠近基座的3个自由度可以调整不动点的位置。
1.1 调整臂
我们设计的新型单臂单孔微创腹腔镜手术机器人系统的4条操作臂均挂载在一较小的C形臂(简称小C)上,小C挂载在一较大的C形臂上(简称大C),大C通过一旋转关节与台车支座相连,该关节称为悬吊关节。其中,悬吊关节轴线、大C轴线和小C轴线相交于一点,该点称为不动点,如图3所示。不动点的位置由调整臂的3个关节控制,其中不动点的高度由图3中红色伸缩关节调整,不动点在水平面投影的位置由图3中绿色旋转关节和蓝色伸缩关节共同决定。术前,可以通过示教操作,移动不动点的位置,使不动点与穿刺器重合,将穿刺器与患者台车连接后即可开始手术。术中,不动点位置调整关节固定不动,通过悬吊关节、大C关节和小C关节的位置变化可改变4条器械臂的整体朝向,调整操作空间。值得注意的是,本系统通过大C和小C实现了机械不动点,相较于Da Vinci SP系统,使用丝缠绕驱动的方式具有更高的刚性与更可靠的机械传动方式,有效避免了驱动丝需要经常拆机维护的弊端,实现了机械结构的改进。
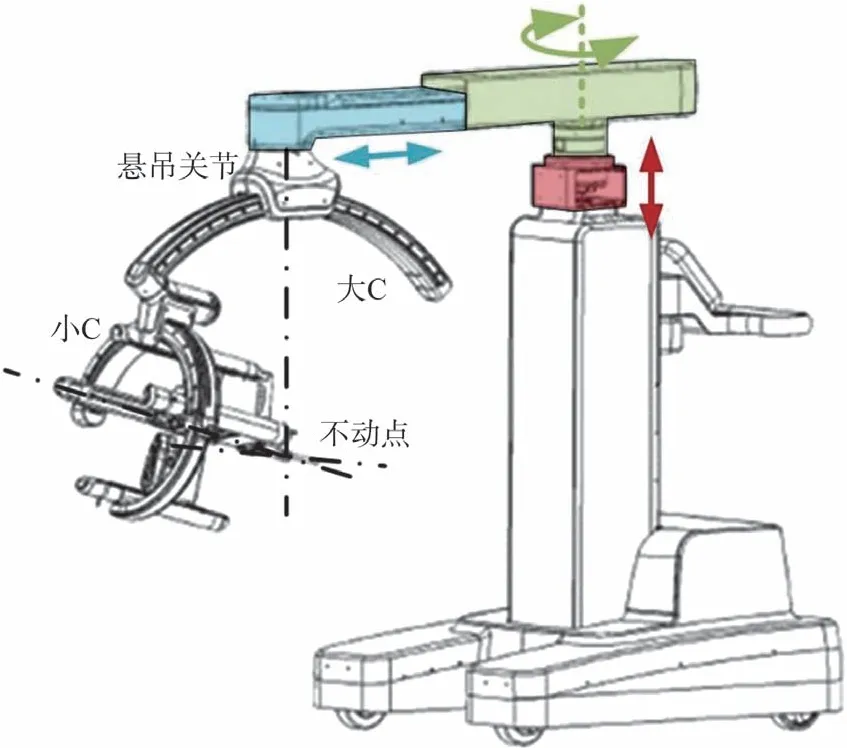
图3 不动点及调整臂位置关节调整示意Fig.3 Remote center of motion (RCM) and position adjust joints
1.2 器械
工具器械具有5+1个自由度,如图4所示。本器械配备有肘关节与腕关节,其中肘关节由两自由度平行关节实现,腕关节由俯仰偏摆关节实现,自转关节配置在器械末端,如图4(a)所示。器械的平行关节可以在伸出穿刺器套筒后执行扩张操作,避免单孔手术中出现的直线视野和器械可动范围不足的情况,如图4(b)所示。通过平行关节、俯仰偏摆关节和自转关节的控制,配合器械沿操作臂滑轨的整体运动,可实现器械末端的6自由度控制。除特殊器械外,一般在末端配备有开合关节。我们设计的单臂单孔手术机器人系统除支持使用常规柔性内窥镜外也支持使用刚性内窥镜。其中柔性内窥镜用于在术中通过主从的方式调整视野,其肘关节由两自由度平行关节实现,腕关节由俯仰偏摆关节实现,与工具器械不同,柔性内窥镜无自转关节,如图4(d)、图4(e)所示。依靠器械关节可大范围灵活运动的特性,本系统支持配合使用30e 刚性内窥镜完成手术。刚性内窥镜如图4(f)所示,术中摆位示意如图5所示。在Da Vinci SP系统中,因其关节展开角度较小,仅支持使用丝传动柔性内窥镜以避免术中出现视野遮挡的情况。由于使用丝传动,其允许使用次数将显著低于刚性内窥镜,造成手术费用进一步上涨。本系统可通过柔性内窥镜的运动来调整视野,在使用刚性内窥镜时可通过悬吊关节、大C和小C的配合运动来调整视野。
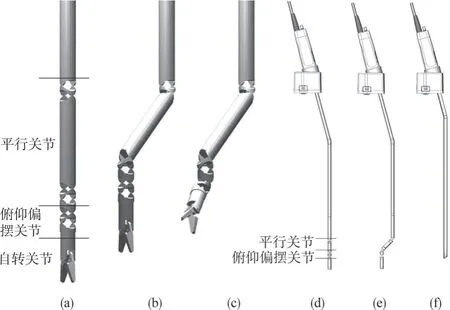
图4 器械运动和内窥镜示意Fig.4 Motion illustration of the robotic instrument and the endoscopes
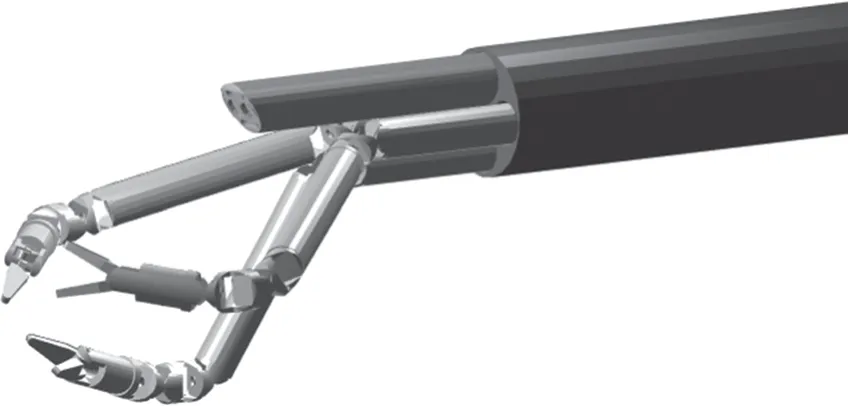
图5 使用刚性内窥镜进行单孔手术示意Fig.5 Configuration example of the robotic instruments in the single-port surgery when using the rigid endoscope
2 控制系统
系统的控制框架如图6所示。图中有3条主要链路:一是运动控制链路,由医生操纵主控制臂,主控制臂末端的运动信息通过比例映射,得到器械末端的运动控制量,从而实现遥操作主从控制;二是力反馈链路,器械通过力反馈模块得到主控制臂末端的虚拟反馈力,基于虚功原理由主控制臂各关节输出力矩进行等效,实现器械力反馈;三是图像链路,医生将收到由内窥镜实时传输的高清三维立体影像。在运动控制链路,通过引入非线性修正量实现器械的高精度控制,在力反馈链路中通过引入多模态仿真机制实现力反馈保护技术。
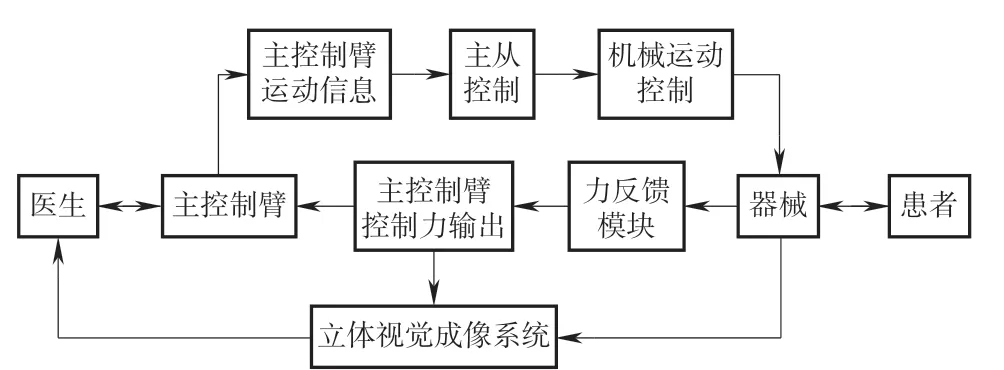
图6 系统控制框架Fig.6 System control framework
2.1 器械高精度控制
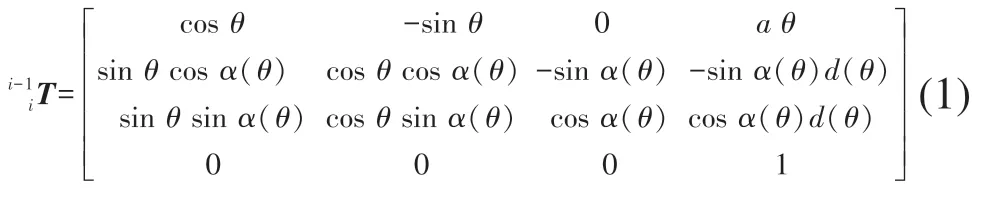
在器械的运动学建模中,通常使用四参数关节建模方法,即通过轴转角偏置α、杆长a、轴位置偏置d、转角θ对杆件的几何位置关系进行描述。然而,在这种建模方式中,参数往往被视为常数,由设计值决定。在本系统中,参数被假设为转角的非线性量,并通过设计参数对非线性修正量进行预标定,其坐标转换矩阵如式(1)所示。
为了从理论上分析这种建模方法的优势,假设杆长设计值为l,杆长测量值服从(1f 0.5%)l区间内的均匀分布,关节角服从最大可动区间内的均匀分布,使用蒙特卡罗法随机生成10000组杆长实际值与关节角数据,得到误差分布如图7所示。对于每组随机生成的杆长测量值与关节角数据,可计算出末端参考点基于不同运动学模型的位置;同理,基于杆长设计值,可计算出末端参考点的理论位置。通过计算末端参考点位置与其理论位置的误差,可以得到该末端参考点理论位置处的定位误差。图7(a)中点云位置为末端参考点的理论位置,点云颜色为使用标准四参数关节建模得到的定位误差。在图7(b)中点云位置与图7(a)一致,不同之处在于,点云颜色为非线性参数建模得到的定位误差。其中蓝色表示定位误差小,黄色表示定位误差大。从点云定位误差分布中可以看出,非线性参数建模方法具有全局更小的定位误差,在理论上体现了该建模方法的优势。将所得点云结果汇总分析后,得到2种方法的统计量如表1所示,其中所使用的运动学建模方法比传统建模方法在理论上提升绝对定位精度约0.58 mm,提升率约78.0%,且定位误差具有极低的标准差。
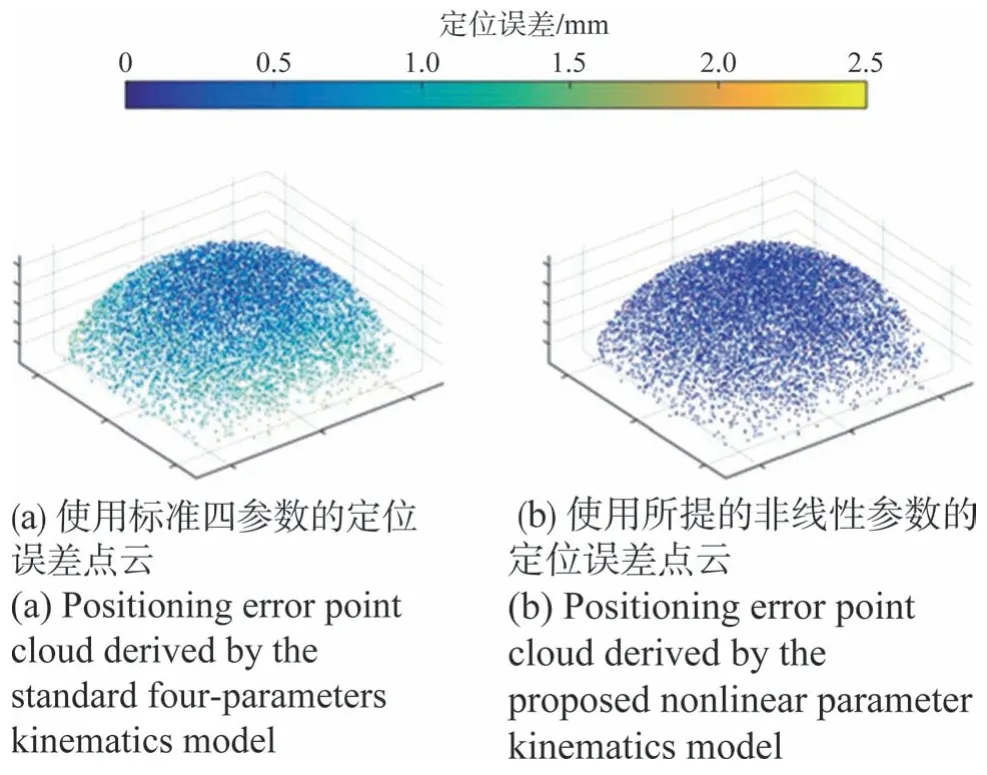
图7 定位误差点云图Fig.7 Positioning error point cloud map

表1 使用不同运动学模型计算的定位误差平均值和定位误差标准差Tab.1 Mean positioning error and the standard positioning error deviation derived by different kinematics models
2.2 力反馈保护技术
系统的力反馈控制指在遥操作控制的基础上,将手术器械的信息通过力的方式由主操作臂反馈给术者,实现多维感知同步。
力反馈模块实现了2种功能:一是当器械接近硬件边界时,力反馈模块会计算器械末端虚拟力,虚拟力将阻止关节继续朝边界运动;二是当器械不处于边界且处于准静态时,力反馈模块会计算器械末端实际接触力,计算原理见式(2)[14]:

式中:qs为患者台车关节位置;τ为从端关节力矩;J为系统的雅可比矩阵;F为器械末端的接触力;M为质量矩阵;C为科氏力矩阵;G为重力向量;f为干扰项。

即通过重力项和干扰项的辨识获得器械末端的接触力。
通过以上方式,可计算出2种功能下器械末端的受力,输出到控制力输出模块后,器械末端受力信号经过滤波与增益放缩后,可获得主控制臂的末端反馈力。基于虚功原理,可获得主控制臂的关节控制力矩,实现力反馈。
3 临床试验
为验证新型单臂单孔微创腹腔镜手术机器人系统的临床适用性,开展了胆囊切除临床试验10例。手术均正常完成,无并发症发生,手术数据如表2所示。图8(a)为本手术机器人系统执行胆囊切除手术时的照片,患者处于平卧位,经脐孔正中小切口进入腹腔,术后切口缝合后如图8(b)所示,10例手术统计数据如表2所示。由图8可知,手术机器人调整臂运行正常,在术中全程使用刚性内窥镜,避免了探查后镜头的更换,降低了手术成本,验证了刚性内窥镜在单孔系统中的可行性。术者反馈术前调整臂摆位方便易操作,术中器械定位精准,主控制臂遥操作过程中操控感舒适,器械可灵活自由地完成指令操作,基于调整臂运动的视野调整功能符合直观操作习惯,易于掌握,术后患者缝合伤口小、出血量少,显著低于传统胆囊切除手术,具有临床创新实践价值。从表2可知手术中的实际切除时间随着术者使用次数的增长显著下降,初步验证了本手术机器人系统可以加快医生手术操作的学习曲线,对临床的医师培训起到了积极作用。由表2可得10例临床手术的平均手术切除时长为32.6 min,平均出血量约为5 mL。在文献[15]中,使用Da Vinci single site系统进行的5例胆囊切除临床手术的平均时长为53.4 min,平均出血量为20 mL。故使用单臂单孔构型的本系统在平均手术时长与平均出血量均显著优于使用多臂单孔构型的Da Vinci single site系统,验证了单臂单孔构型更适用于单孔手术,提升了临床应用价值。
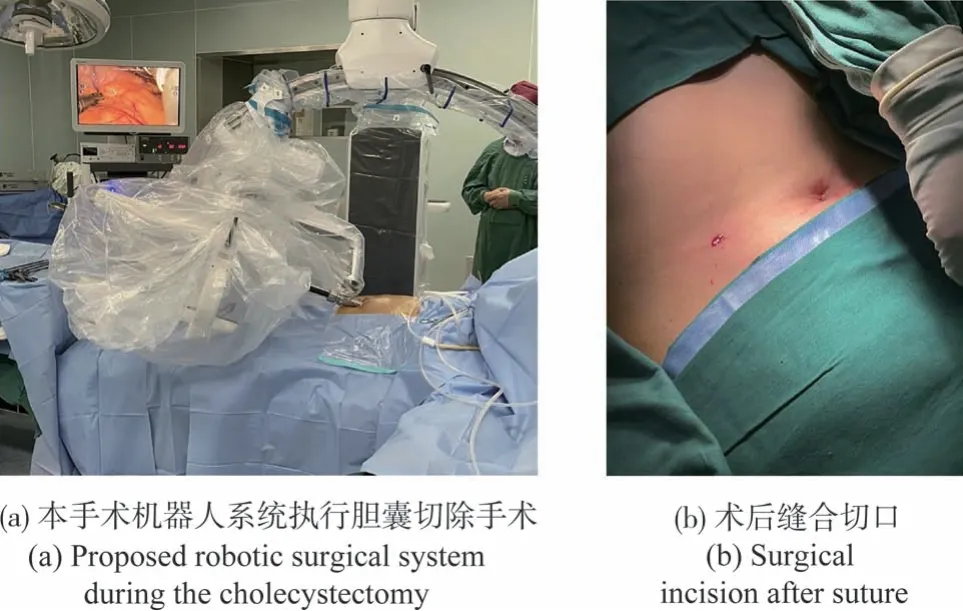
图8 本手术机器系统临床应用Fig.8 Clinical application of proposed robotic surgical system
4 总结
单孔手术因其创伤小、失血少、恢复快的优点在临床上广泛应用,单孔腹腔镜手术机器人的开发日益受到重视,在技术迭代过程中正从多臂单孔构型转变为单臂单孔构型。本系统提出的系统具有以下几项优势:①不动点的构造通过悬吊关节、大C关节和小C关节实现,具有更高的刚性与可靠性,提高了手术的安全性,降低了日常的维护成本;②手术器械具有更大的关节运动角度,除柔性内窥镜外也支持使用刚性内窥镜,显著降低了手术耗材成本;③改进传统标准四参数运动学建模方法,引入非线性参数,本运动学算法相较传统方法可大幅提升理论绝对定位精度,保障了系统对手术器械的高精度控制;④反馈力分为2种模式,更便于医生的操作,增强医生的 临场感”。以上特性在临床胆囊切除术中得到了充分验证。综上,设计新型机器人奠定了具有核心自主知识产权的国产腔镜手术机器人在临床应用的坚实基础,具有重要的临床应用价值。
猜你喜欢
数学物理学报(2020年4期)2020-09-07
重型机械(2019年3期)2019-08-27
诗潮(2019年8期)2019-08-23
中等数学(2019年12期)2019-05-21
测控技术(2018年5期)2018-12-09
电子制作(2018年9期)2018-08-04
意林·少年版(2018年10期)2018-05-30
诗潮(2017年4期)2017-12-05
浙江大学学报(工学版)(2016年9期)2016-06-05
诗潮(2015年3期)2015-03-20