
基于专利引文网络的医用纳米机器人技术前沿识别研究
2023-02-09 09:28张婷陈娟杨潇逸欧阳昭连
中国医疗设备 2023年1期
张婷,陈娟,杨潇逸,欧阳昭连
中国医学科学院/北京协和医学院 医学信息研究所,北京 100020
引言
1959年,诺贝尔物理学奖得主理查德·费曼首次提出“纳米机器人”的概念,其认为人类未来有可能建造一种分子大小的微型机器,在非常小的空间里构建物质。1974年,日本科学家谷口纪男(Norio Taniguchi)在一篇题为《论纳米技术的基本概念》(On the Basic Concept of Nanotechnology)的科技论文中首次提出了“纳米技术”,随后派生出纳米生物学,并衍生出纳米机器人[1]。纳米机器人是一种借助最先进的芯片和纳米技术,在原子水平上精确地建造和操纵物体的机器人。它是根据分子水平的生物学原理为设计原型,在纳米尺度上应用生物学原理,研制可编程的分子机器人,是纳米机械装置和生物系统有机结合的产物[2-3]。纳米机器人涉及分子仿生学和电子控制技术,是高度集成的系统,要求具备驱动单元、控制单元、传感单元,同时针对不同功能需要具备对应的工作单元。
在医疗领域,纳米机器人具有广阔的应用前景,包括手术、诊断及医学成像等[4-6]。纳米机器人用于药物靶向输送可以实现药物精准治疗,另外,也有少量研究将其用于其他物质输送,如将DNA适配体输送到病变部位实现癌症精准治疗,将活细胞输送到目标部位实现组织修复再生[7]。使用纳米机器人进行手术可以减少侵入性,从而减轻患者不适的症状及缩短术后恢复时间[8]。可商用化的医用微型机器人仅以胶囊机器人为代表,主要运用于胃镜检查等领域,使用领域相对局限,未来还有很大的发展空间。
专利是技术信息最有效的载体,专利文献包含了丰富的技术信息,是技术创新的重要方式和必要资源,在不同层面上反映技术创新活动的水平[9-10]。通过对全球医用纳米机器人领域的专利分析,可以宏观把握技术创新态势,明确技术创新的方向,为我国医用纳米机器人研究提供信息服务支持,同时从情报学角度为技术开发提供新的研究视角。
1 数据来源与方法
数据来源于德温特专利索引(Derwent Innovations Index,DII)数据库,数据采集时间为2022年1月18日。DII是由科睿唯安开发的世界上最大的专利文献数据库之一,可提供丰富的专利信息及专利引文信息,为本研究提供全面可靠的数据来源[11]。DII数据库中的1条专利记录代表1个专利家族,即1组同族专利。同族专利是指具有共同优先权在不同国家或国际专利组织多次申请、多次公布或批准的内容相同或基本相同的1组专利文献,1组专利即代表1个技术。开展技术分析时,通常基于合并同族后的专利数量[12-13]。本研究采用合并同族后的专利数量进行技术开发态势分析。采用主题检索的方式,以“医用纳米机器人”为主题词进行检索,共得到专利213组。将专利数据导入到Derwent Data Analyzer(Clarivate Derwent,美国)中进行数据清洗、计量分析及构建专利引文共现矩阵,将共现矩阵导入Ucinet 6(Netdraw)软件构建并绘制专利引文网络。基于专利引文网络,对网络中的专利标题及摘要进行文本聚类,采用VOSViewer软件可视化,以识别医用纳米机器人领域的技术前沿。
专利间的引用关系可以突出技术的科学基础,表明技术间的继承和积累关系。根据引文关系建立的专利引文网络可以描述特定领域的技术发展脉络[14]。为探索医用纳米机器人领域的最新技术前沿,本研究选择医用纳米机器人领域2016—2021年申请的专利作为研究对象,提取专利引文信息,选取高被引专利构建共现矩阵,通过Ucinet软件构建基于共现矩阵的专利引文网络,采用Netdraw软件将专利引文网络进行可视化。
文本聚类是一种重要文本挖掘方法,采用无监督学习方法,将若干文本进行相似度比较,最后将相似度高的归为一类[15]。同类的文档相似度较大,不同类的文档相似度较小。组内相似性越大,组间差距越大,说明聚类效果越好。文本聚类已被广泛用于识别许多领域的研究前沿,以及评估新的技术机会。本研究对专利引文网络中的专利标题和摘要进行共词分析,选取高频词进行文本聚类,以反映基于高频词聚类的技术前沿,采用VOSViewer软件进行可视化。
2 专利申请趋势
医用纳米机器人领域共有专利申请213组,专利申请年度分布如图1所示。根据技术生命周期理论[16],该领域可以分为3个发展阶段:萌芽期(1999—2006年)、发展期(2007—2015年)和快速发展期(2016—2021年)。医用纳米机器人领域最早的专利申请开始于1999年,萌芽期发展较为缓慢,专利申请数量(14组)不及该领域专利申请总量的1/10(6.57%),每年的专利申请数量都在5组以下。发展期发展相对平稳,专利申请数量达到78组,每年的专利申请数量在10组上下波动。快速发展期专利申请活跃,增速明显,2016—2019年复合增长率为65.54%,2019年专利申请数量跃升至49组,达到顶峰;2016—2021年的专利申请数量有152组,超过该领域专利申请总量的70%。医用纳米机器人领域近几年专利申请活跃,技术发展迅速。

图1 医用纳米机器人领域专利申请趋势
专利布局围绕多个技术点展开,主要聚焦于药物靶向和缓控释技术、图像诊断、溶栓治疗等。药物靶向输送和缓控释放技术是目前的研究热 点( 如 KR101458938B1、KR1020130125054A、CN105854173A),专利布局涉及外场驱动和药物靶向控释2个技术点,借助于外部磁场选择性地释放药物。消化系统检查的微型机器人相关专利布局较多,结合检查和诊断,包括内窥镜、胶囊型机器人等(如CN101073489A、WO2016095131A1)。血管内治疗的微型机器人专利相关技术用于去除堵塞血管的血栓、凝块和闭塞物(如US9136051、CN107595385A)。除了消化系统、血管内治疗领域,在牙科(WO2020191879A1)、眼科(WO2009140688A3)、脑部疾病(US8862205)等也有相应布局。
3 专利引文网络
2016—2021年的专利申请数量有152组,共引用专利1071件。选取前0.5%的被引专利作为高被引专利,共有19件,被引频次>2次。以19件高被引专利构建共现矩阵,形成医用纳米机器人领域的专利引文网络(图2),网络中包含2个子网络。从图2可以看出,有3件专利未在任何1个子网络中,分别是CN110270978(标题:一种多物理能场耦合作用下微纳机器人操控平台系统)、CN110861111(标题:一种磁场与电场耦合作用的微纳机器人操控平台)、US20130241344(标题:Fuel-free nanowire motors无燃料纳米电机),3件专利涉及纳米机器人的操控平台及纳米电机,分别是关于纳米机器人控制单元和驱动单元的相关技术。最终形成的医用纳米机器人领域专利引文网络为包含16件专利的2个子网络。

图2 医用纳米机器人领域的专利引文网络
4 技术前沿
对医用纳米机器人领域专利引文网络中每个子网络的专利标题及摘要进行文本聚类,采用VOSviewer软件实现可视化,解读后得到该领域的技术前沿。医用纳米机器人领域共有5个技术前沿,子网络1中包含5件专利(表1),识别出2个技术前沿(图3),分别为三维电磁驱动技术、磁感应式药物递送系统;子网络2中包含11件专利(表2),识别出3个技术前沿(图4),分别为纳米药物载体、磁性纳米粒子、纳米机器人制备技术。

表1 医用纳米机器人领域专利引文网络子网络1中的专利信息
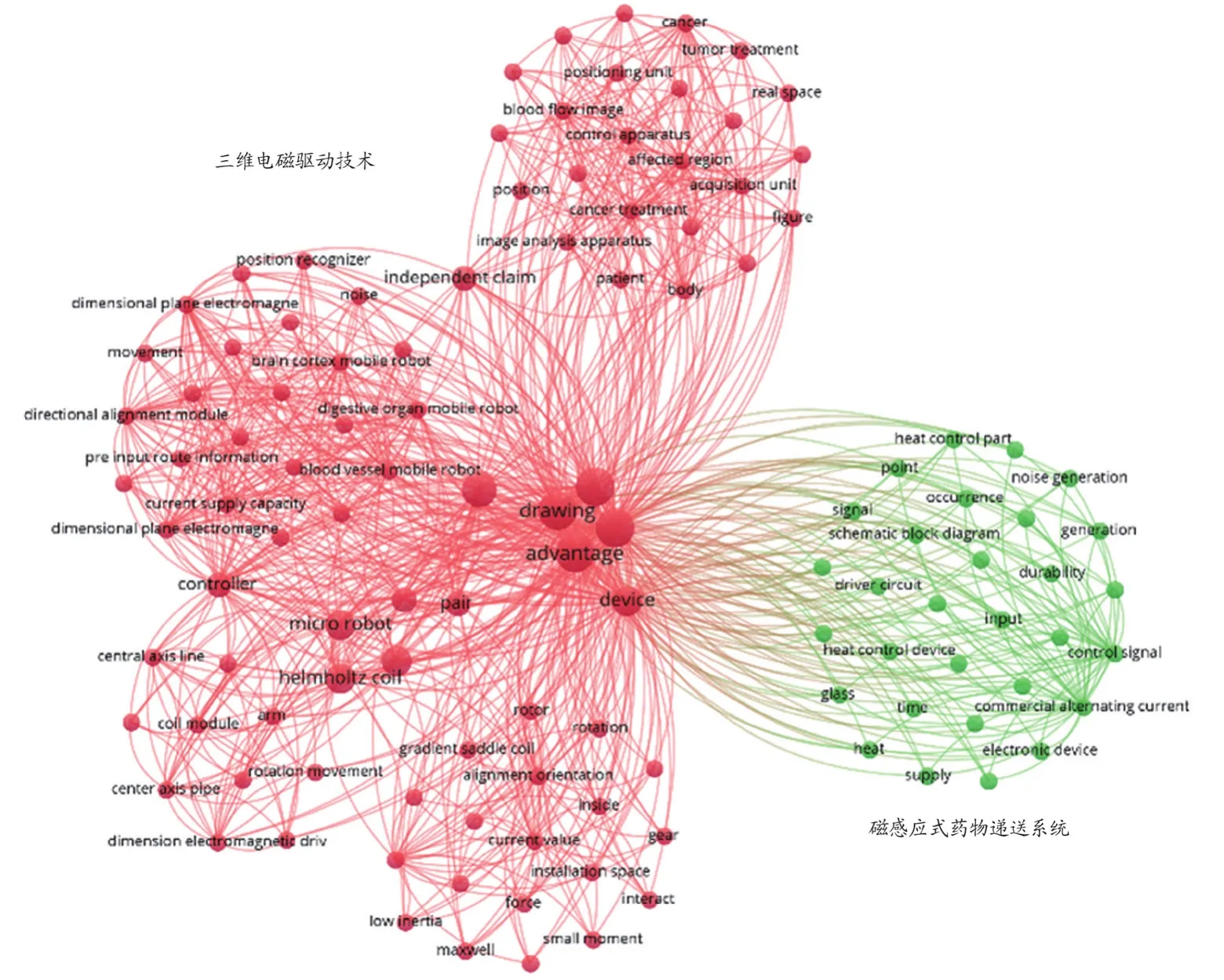
图3 医用纳米机器人领域子网络1中识别出的技术前沿
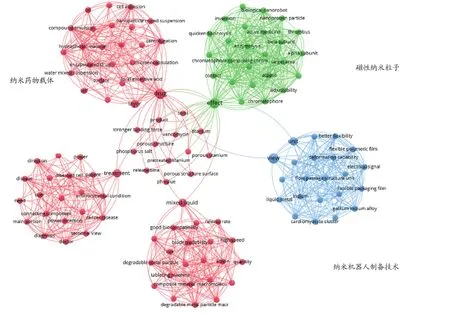
图4 医用纳米机器人领域子网络2中识别出的技术前沿

表2 医用纳米机器人领域专利引文网络子网络2中的专利信息
4.1 三维电磁驱动技术
纳米机器人的驱动机理主要分为化学驱动与外场驱动。三维电磁驱动是一种外场驱动方式,利用磁场的驱动方式来实现纳米机器人的导航运动。电磁驱动系统正从一维、二维驱动向三维电磁驱动发展。三维电磁驱动可以实现微机器人多自由度主动驱动,并兼容多种磁驱动方式,同时拥有相对较大运动空间[17]。此外,三维电磁驱动还改善了传统磁场磁感应强度和磁场梯度不足,以及磁场控制区域均匀度不高等问题[18]。磁性纳米机器人的低强度、低频率磁场能够穿透生物组织并且不会被生物所吸收,使得其安全性得到很大的保障[19]。
4.2 磁感应式药物递送系统
磁感应式药物递送系统是基于磁性纳米颗粒的磁性药物递送系统,由于其具有良好的生物相容性和优异的多功能负载能力,受到越来越多的关注[20]。磁感应式药物递送系统将靶向配体、药物负载和磁性纳米颗粒组装结合,可以提供复杂的磁性递送系统,使得靶向功效提高、毒性降低。由于对外部磁场的敏感响应,磁性纳米颗粒及其组件已被开发为新型智能传递系统,因其体积小,且能以微创方式进入难以到达的病变部位,在靶向治疗领域扮演越来越重要的角色。
4.3 纳米药物载体
纳米药物载体通过将药物包封存于纳米微粒中,通过纳米微粒来调节药物释放的速度,并能增加生物膜的穿透性、改变药物在人体内的分布、提高生物利用率等。纳米机器人作为药物载体,可以在体内实现长循环,自发或引导下到达病灶区,精准识别细胞或病原体上的疾病特异性标志物,针对不同的病理环境释放对应的报告分子与药物。纳米靶向药物是以纳米颗粒作为药物载体,通过改变药物在体内的分布和药物动力学特性,确保药物对肿瘤等病变部位的靶向性,大大提高了药物对病变部位治疗的准确性,在有效治疗的同时,很大程度上减轻了患者的痛苦[21]。
4.4 磁性纳米粒子
磁性纳米粒子是近年来发展迅速且极具应用价值的新型材料,在生物医药领域得到越来越广泛的应用[22-24]。纳米技术推动了癌症治疗纳米机器人的发展,在外加磁场作用下,通过磁性纳米粒子的磁性导向性,使纳米机器人准确作用于肿瘤病变部位,增强对病变组织的靶向性,降低对正常组织细胞的伤害[25]。药物靶向将药物递送到特定位点,可消除药物的不良反应,并降低用药剂量。磁性纳米粒子与外加磁场和/或可磁化的植入物可将颗粒递送到靶标区域,在药物释放时使颗粒固定在局部位点,因而药物可在局部释放,这个过程称为磁性药物靶向。
4.5 纳米机器人制备技术
目前比较常见的纳米机器人的制备方法包括电沉积技术、物理气相沉积技术、自卷曲技术、可控组装技术、3D打印技术和生物杂化技术。纳米机器人制备技术需要加快创新。在纳米机器人技术的应用过程中,最突出的风险是用于制造纳米机器人的纳米颗粒的安全性问题。在纳米机器人制造过程中所使用的一些纳米材料可能会存在潜在的毒性,最主要是纳米颗粒的不可溶解性。已有研究证明了一些纳米颗粒的毒性,结果显示人体内的纳米颗粒可以不受阻碍地进入到人体的健康细胞中,甚至可以通过血液循环系统进入到大脑中,并干扰健康细胞和组织的正常工作[26]。纳米颗粒的安全性问题受到科研人员的特别关注。
5 讨论与总结
专利是技术创新的重要方式和必要资源,是衡量一个国家/地区科技创新能力的重要指标。本研究基于DII数据库对医用纳米机器人领域的专利分析发现,医用纳米机器人领域近几年专利申请数量增长迅速,技术创新持续活跃。通过对技术前沿分析可以看出,医用纳米机器人领域目前最受关注的是如何解决药物靶向递送问题,3个技术前沿都与药物靶向递送相关,磁感应式药物递送系统、纳米药物载体、磁性纳米粒子都是为了将药物靶向递送到靶标区域,从而提高疗效、降低不良反应作用。三维电磁驱动技术纳米机器人可以提高安全性,纳米机器人制备材料的毒性问题同样备受关注。
随着科学技术的不断发展,人们对医疗健康的关注度越来越高,迫切期待精准高效的医疗手段,医用纳米机器人在精准医疗方面有巨大的发展潜力。具有体积小、靶向精准、损伤低、可控等诸多优点的纳米机器人被誉为未来对抗人体疾病最理想的武器之一,在生物医学等领域具有广阔的应用前景[27]。随着未来纳米机器人技术的发展,将加快制备技术创新,发展低成本、大批量、多结构设计的纳米机器人;进一步提高制备材料的安全性、可降解性;解决纳米颗粒的不可溶解性问题,开发理想的生物学材料(如液态金属镓、镍);丰富实时控制技术类型,实现纳米机器人在人体内进行可控自主运动;发展纳米机器人的集群运动;深度研发癌症靶向治疗的纳米机器人,加速癌症靶向治疗领域的发展。
猜你喜欢
中老年保健(2022年1期)2022-08-17
保健医苑(2022年5期)2022-06-10
肝博士(2020年5期)2021-01-18
中学生数理化·高一版(2020年6期)2020-12-17
中学生数理化(高中版.高二数学)(2020年6期)2020-12-04
农药科学与管理(2019年9期)2019-11-23
消费导刊(2018年10期)2018-08-20
小天使·六年级语数英综合(2017年3期)2017-04-25
河南科技(2016年8期)2016-09-03
发明与创新(2016年5期)2016-08-21
