
新型水下发射功率自调整的定向钻传感器
2023-02-07 18:09王晓朋周东荣周怡和
航海 2023年1期
蒋 哲 王晓朋 周东荣 周怡和
(交通运输部上海打捞局,上海 200090)
0 背 景
利用非开挖水平定向钻在海水中进行施工作业可以用来进行线缆铺设、沉船打捞等,其中无线控向因为其操作简单、施工时间短所以经常被选用做水平定向钻施工的辅助导向方法。无线控向时选择合适的探棒发射功率是比较重要的,要兼顾施工的最大深度和施工所花费的时间长度;在海水中施工和在陆地上施工不同的是,在海水中施工时可以通过检测探棒当前的水压,来计算当前位置与水平面位置的距离,就可以让探棒根据当前的实际深度来自动调节其发射功率,深度大时选择大的发射功率,深度浅时选择小的发射功率,这不仅有利于某次的施工,而且针对不同的施工环境,都不用再刻意的去选择或者定制新探棒,是一种比较合理的适用于海水施工的探棒工作模式。
针对这种海水施工探棒需求,关键的一点是要建立好所选频率的电磁波在不同介电常数海水中的传播规律模型并进行参数的计算,当模型建立起来后,就可以根据实际的探棒工作深度来进行发射功率调整,使探棒在不同海水深度都可以满足海平面上的接收机对信号的接收要求;文献[1]建立了海水中电磁波的麦克斯韦波动方程,使用分离变量法和双重贝塞尔函数法求解了海水中磁场的传播模型;文献[2]通过建立海平面和海底的磁场关系,建立了磁场在海水分层结构中的衰减关系;文献[3]建立海-空交界面的磁场透射模型,进行了仿真和参数识别,并进行了设立中继节点增大传输深度的尝试。
1 解决问题的方法
传统的理论分析模型都是建立了复杂的数学公式,这些公式计算复杂,参数很难的得到解算,在具体工程实践上很难应用。因此,我们在考虑理论模型的基础上,选择简化的、可使用性强的模型;通过前边参考文献的分析,我们确定磁场的传播和距离、海水的介电常数、电导率、磁导率等相关,这样我们建立以下两个模型公式:
(1)Dx=K*(A3/Ax)'(1/a)+b:电磁波信号值的传输距离计算公式。其中Dx为实时距离,A3 为探棒在海水中3 m 时的信号值,Ax为探棒在Dx距离处的信号值,k为增益值,a为衰减值,b为偏置;当某一海水确定后,k,a,b即为确定值。
(2)a=f(e),衰减值和介电常数的函数关系,此关系一般为比较复杂,包括海水中的流动,趋肤效应等,但是实际实践时,我们采用多点计算后的插值法来进行近似处理。
建立好以上两个模型后,要进行模型参数的测定。针对某一个海水介电常数值e0,我们采用以下方法:将探棒放入海水中记录A1,A2,A3 一直到A10,通过matlab 的拟合可以近似计算出k0,a0,b0,此处我们将k0,a0,b0记做a0;同样的方法在介电常数为e1 时,可以得出a1;取得n 组(e,a)对应关系后,可以通过曲线拟合,得出介电常数和模型参数的对应关系a=f(e)。
2 产品设计和调试
(1)根据探棒要实现的功能,设计硬件结构如图1 所示。
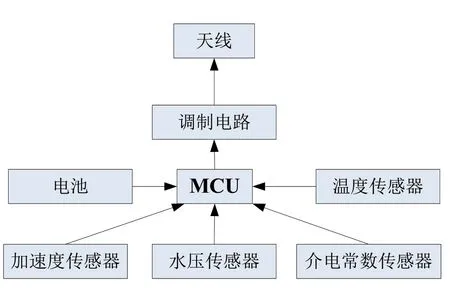
图1 功率自调整探棒硬件框图
包括检测水深的水压传感器、检测水质介电常数的传感器、检测姿态的加速度传感器、将采集信息以电磁波的形式进行发射的调制电路和天线,电池一般选用动力锂电池,放电能力强,MCU 选用耐高温的32 位高性能芯片,调节发射功率时使用其先进的PWM 管理功能。
(2)完成电磁波海水模型建模和参数识别后,存储到MCU 的掉电保存区,以便后续使用,软件上设计探棒的具体工作流程为:将发射功率从最小到最大分为m 档,初始在空气中上电时的功率为最小档1 档,接收机能解析的最小幅值为经验设定值Amin,以上的参数测试都是出厂时测定;具体施工时将探棒传感器放入钻头后进行空气中的3 m 标定,记录3 m 时的信号幅值为A3;工作室探棒将根据水深和介电常数自动调整发射功率,让发射到接收机的幅值始终大于最小可工作幅值,让施工顺利进行;调整发射功率的流程如图2 所示:
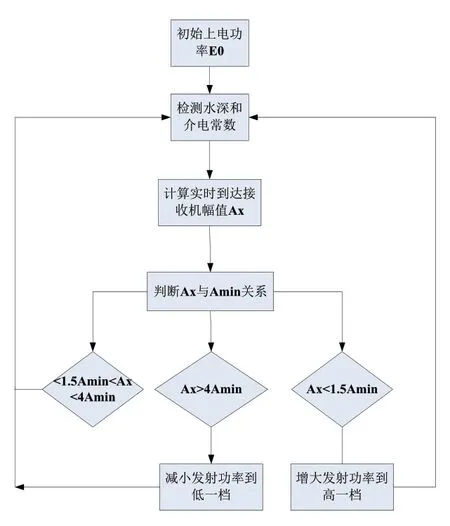
图2 探棒发射功率自动调整框图
(3)产品实物图
自调整探棒一方面包含的传感器多,另一方面要将功率做大,以覆盖更大使用范围,产品实物见图3。

图3 自调整探棒和普通探棒的比较
3 取得的有益效果和结论
定向钻的施工过程一般分为3 个阶段:钻头深度逐渐加深阶段、钻头到达指定深度后调平钻进阶段、钻头快要到达指定目标时深度逐渐减小直到出土阶段。传统方法为了保证在最大深度时依然能够工作,必须全程将整个传感器设置在最大发射功率,这样造成了功率的浪费。本文所述的传感器可测算低频磁场信号在不同介电常数水中的距离衰减规律,从而可很方便计算出传输距离,并根据介电常数和水深,动态调整发射功率档位的规则,并且自动完成调整,让接收机的使用者感觉不到功率的改变,在维持正常工作的同时,节省功耗,大大延长传感器作业时长。
猜你喜欢
趣味(数学)(2019年12期)2019-04-13
儿童故事画报·发现号趣味百科(2017年10期)2018-03-13
电子制作(2017年20期)2017-04-26
作文周刊·小学一年级版(2016年39期)2017-03-03
材料科学与工程学报(2016年5期)2016-02-27
中国塑料(2015年8期)2015-10-14
电子设计工程(2014年18期)2014-02-27
科学时代·上半月(2013年2期)2013-04-15
儿童时代·幸福宝宝(2009年2期)2009-02-19
