基于GEE云平台的舟山海域船只多源遥感监测
2023-02-07 03:09:50李晓阳尹永会
地理空间信息 2023年1期
李晓阳,尹永会*
(1.中国地质调查局 烟台海岸带地质调查中心,山东 烟台 264000)
舟山地区作为我国乃至世界上重要的海上经济活动区,其水上船只目标监测对于海上安全和渔业资源管理具有重要意义。遥感可从多波段、多时相和全天候角度获得全球观测数据,这在海洋监测领域是其他技术方法无可替代的。鉴于当前遥感技术的快速发展,从千米级到亚米级,从多光谱到合成孔径雷达(SAR),从国外到国内,不断丰富的多源遥感大数据为快速、准确地进行海上船只活动监测提供了可能。然而,遥感数据天然具有数据量大、分辨率高、覆盖范围大、重复拍摄、波段覆盖广等特点,如何解决与日剧增的遥感数据与高效处理、分析这些数据的矛盾成为地理信息工作者不得不面对的现实问题[1]。Google Earth Engine(GEE)的出现在一定程度上解决了这个矛盾。GEE是Google公司提供的一个基于云计算的遥感大数据处理平台,能在全球尺度下进行地理空间数据分析,提供了PB数量级的全球免费的卫星遥感数据、矢量数据以及大量数据处理函数,实现了信息提取算法实时共享[2-5]。GEE通过给研究人员提供强大的运算能力,使遥感数据的分析处理变得更加高效,为大尺度区域研究提供了一种有效途径[6]。因此,本文基于GEE云平台,利用GF-3 FSI、Sentinel-2 MSI、Sentinel-1 IW等多源遥感数据,对宁波舟山地区海上船只活动进行了监测与分析。
1 研究区概况与数据来源
1.1 研究区概况
本文选取的研究区坐落于浙江省东北部,濒临东海;地处长江入海口南侧,距长江入海口直线距离约为140 km;地理范围为121°30′~123°25′E、29°32′~31°04′N,东西长182 km,南北宽169 km,面积约为2 680 km2(图1)。研究区位于我国海岸中部,属南北航运的必经之地,除各岛屿间密集航路外,还有5条主航路纵贯海区,其中4条主航路在岛礁区间穿行,且与海区内的客运航线交叉。舟山海区海上航线纵横交错,通航船舶种类复杂。海区内航行的进出上海、宁波、舟山、乍浦等港的船舶,南北航线的国内沿海航行船舶以及渔船、军舰构成了海区内错综复杂、高密度的船舶交通流,且大多数为中小型船舶。
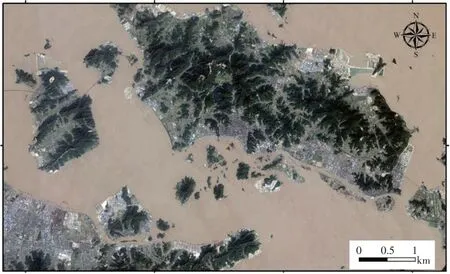
图1 研究区范围
1.2 数据来源
本文采用的主要数据包括SAR、多光谱光学遥感等卫星数据以及其他资料。这些数据一部分是项目组购置的,另一部分是卫星管理部门免费提供的[7]。SAR数据主要包括国产GF-3号精细条带I成像模式数据(GF-3 FSI)和欧空局(ESA)哨兵1号干涉宽测绘带模式数据(Sentinel-1 IW);光学遥感数据为ESA提供的Sentinel-2 MSI。遥感影像主要参数如表1所示。

表1 遥感影像主要参数
GF-3号是我国首颗C频段多极化高分辨率SAR成像卫星,具有12种成像模式,最高分辨率可达1 m;具有全天时、全天候成像优势,能高效获取不同应用模式下1~500 m分辨率、10~650 km幅宽的微波遥感数据。Sentinel-1是一颗近极地太阳同步轨道卫星,携带了一个C波段SAR传感器载荷,频率为5.405 GHz,支持双极化工作模式(HH+HV、VV+VH),有利于陆地地表覆盖分类和海冰以及水下目标监测,且数据可通过ESA免费获取;包括1A和1B两颗卫星,两颗卫星组网可实现6 d的重访。Sentinel-2是ESA发射的一颗太阳同步轨道大幅宽高分辨率卫星,包括2A和2B两颗卫星,每5 d可完成一次对地球赤道地区的完整成像,而对于纬度较高的地区,该周期仅需3 d;携带了一个多光谱仪(MSI),可覆盖13个光谱波段,其中可见光—近红外波段的空间分辨率为10 m、短波红外空间分辨率为20 m、大气探测波段空间分辨率为60 m。为了最大程度地减少云雾对光学数据的影响,本文采用2019-07-01—2019-07-31共计24景Sentinel-2 MSI影像进行去云合成处理。
同时,采用SRTM 30 m分辨率DEM数据对SAR影像进行地理编码。SRTM是由美国太空总署(NASA)、国防部国家测绘局(NIMA)以及德国与意大利航天机构共同合作完成的,搭载于美国发射的“奋进”号航天飞机上。该测图任务时间为2000-02-11—2000-02-22,进行了11 d总计222 h 23 min的数据采集工作,获取了北纬60°至南纬56°之间总面积超过1.19亿km2的雷达影像数据,覆盖地球80%以上的陆地表面。
2 研究方法
2.1 技术流程
本文综合利用GF-3 FSI、Sentinel-1 IW、Sentinel-2 MSI等多源遥感数据进行海上船只识别。具体技术流程为:①对GF-3 FSI和Sentinel-1 IW数据进行必要的预处理,包括多视处理、辐射校正、滤波、地理编码等;②对于Sentinel-2 MSI数据,在云识别的基础上,计算归一化水体指数(NDWI)并求取其均值,再利用最大类间方差(OTSU)算法自动计算阈值进行水陆分离,将得到的水域掩膜文件用于GF-3 FSI和Sentinel-1 IW影像,以提升船只识别精度;③利用恒虚警率识别算法(CFAR)对GF-3 FSI和Sentinel-1 IW数据进行船只识别并分析对比,如图2所示。
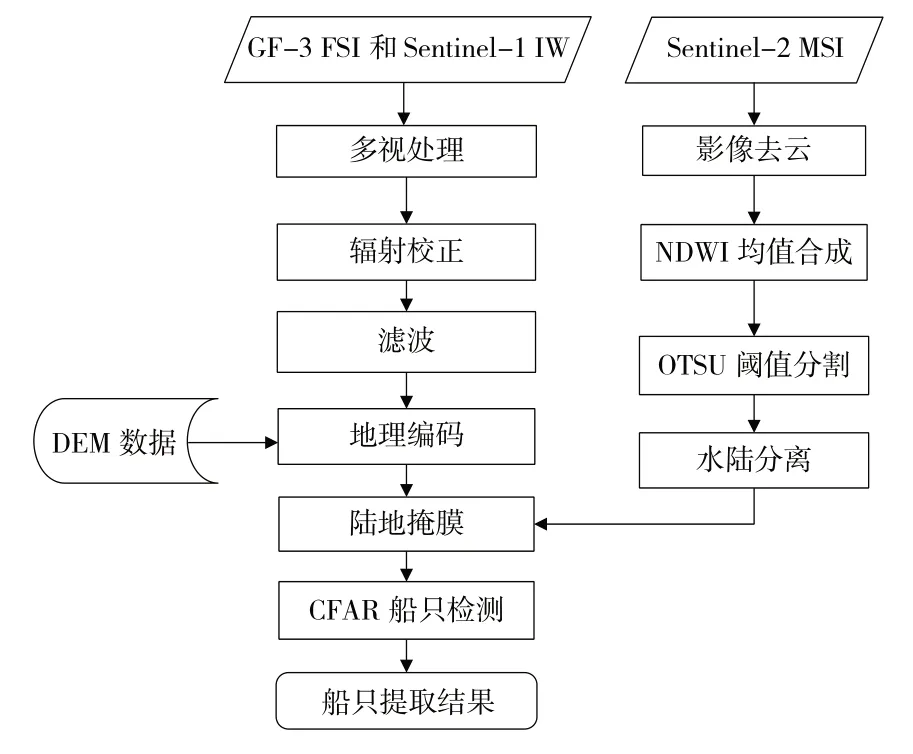
图2 技术流程图
2.2 SAR数据处理
1)多视处理。SAR卫星影像的单视复数数据(SLC)与单个像元散射的雷达回波信号相互叠加,这将导致数据中存在噪声。通过多视处理,即对SLC数据方位向和距离向取平均值,可提升数据辐射分辨率。其中,多视的视数由斜距的距离向、方位向分辨率以及入射角计算得到。
2)辐射校正。雷达传感器测量的是后向散射,即为发射脉冲与接收信号强度的比值。为了能精确反映研究区地物的回波特性,需对SAR数据进行辐射定标处理,即将输入信号转化为雷达后向散射系数。通过辐射校正归一化到统一标准后,获得的后向散射强度信息可不受SAR数据观测几何的影响,便于对比和分析。
3)滤波。采用Frost滤波的方法对影像数据进行滤波处理,可抑制SAR影像噪声,且能较好地保存图像纹理信息,对船只提取较有利。滤波结果如图3所示。
4)地理编码。SAR系统观测到的是电磁波入射地球表面后反射(后向散射)的雷达脉冲强度和相位信息。这个信息编码到雷达坐标系统下,即斜距坐标系,被记录下来。地理编码即将SAR数据从斜距坐标系转换到地理坐标系。地理编码过程中需输入DEM数据,本文采用SRTM 30 m分辨率DEM。地理编码结果如图4所示。
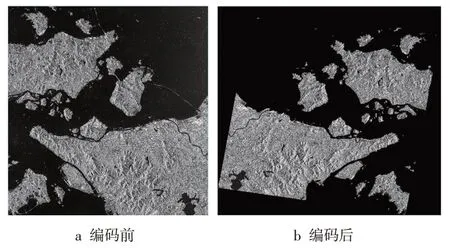
图4 GF-3 FSI地理编码前后对比
2.3 光学数据处理和水陆分离
利用SAR影像进行舰船识别时,舰船相较于海面杂波会呈现高亮的特性,因此多数识别方法也是以幅值差异为基础进行识别,但陆地区域中具备高亮化的房屋建筑等会被识别为虚假目标。因此,识别前需对SAR影像中陆地部分进行精准剔除。然而,由于雷达成像在几何、电磁散射机理中的复杂性和海域中舰船目标无规则摇摆、目标遮挡以及不完全观测等因素影响,导致雷达图像中舰船目标结构缺失以及陆地区域沿岸轮廓信息不完整。为解决基于SAR影像海陆分离的难点,本文利用光学图像中海洋和陆地具有明显轮廓特征差异化信息的特点,基于Sentinel-2 MSI计算NDWI,并结合OTSU算法提取水体,进而进行水陆分离,以减少后续船只识别过程中产生的虚假目标,提高海上船只识别的准确率。
在水陆分离过程中,为了最大程度地减少云雾对光学数据的影响,首先采用s2cloudless算法进行Sentinel-2 MSI数据云识别。s2cloudless是由Sentinel Hub提供的针对Sentinel-2 MSI数据的一种机器学习云识别算法。Sentinel-2影像通过它可以计算得到云掩膜文件,且具有较高的云识别精度。然后,计算NDWI及其均值,最后采用OTSU算法自动计算NDWI阈值进行水陆分离。OTSU算法计算简单,不受图像亮度和对比度的影响,因此在数字图像处理上得到了广泛应用。该方法按图像的灰度特性,将图像分成背景和前景两个部分。方差是灰度分布均匀性的一种度量,背景和前景之间的类间方差越大,说明构成图像两部分的差别越大,部分前景错分为背景或部分背景错分为前景均会导致两部分差别变小,因此使类间方差最大的分割意味着错分概率最小。研究区NDWI分布如图5所示。
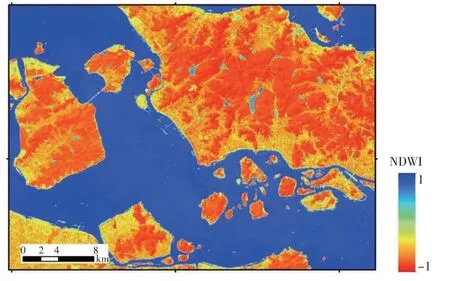
图5 研究区NDWI分布图
2.4 CFAR船只识别
在SAR图像上,水面散射主要以表面散射为主,后散射能力弱,呈现暗色调;而舰船目标拥有与海面不同的散射机制,复杂的船体结构使得舰船目标可被认为是一个由多种不同“角散射”器构成的集合,因此除单次散射外,舰船目标还包含二次散射、体散射、螺旋体散射等[8],后向散射强,呈现亮色调。与水面相比,船只会形成一个较大范围的亮度异常区,与暗色背景差异明显,这构成了SAR图像舰船目标识别的基础。CFAR算法是目前应用最广泛的舰船目标识别算法之一,通过对背景杂波进行统计建模来识别舰船目标[9-10]。CFAR检测器的关键步骤在于对背景杂波的统计建模,一旦概率密度函数fpdf(x)被确定,那么由阈值T产生的虚警率为:

由于一些方位向模糊和杂波像素也具有与船只类似的散射强度,因此仅利用强度分布模型识别船只可能会存在误检,因此在考虑目标强度分布的同时,Leng等将目标的空域分布增加到常规的CFAR检测器中,并称之为“Bilateral CFAR”检测器[11]。核密度估计量的表达式为:

式中,xϕ为目标抽样像素点;n为抽样点个数;h为核函数宽度;K(u)为核函数。

K(u)服从标准正太分布,即

那么,f h(x)可表示为:

式中,Ω(w)为滑动窗口大小。
令h=1,则x的空域值xspatial可被表示为:

由于线性转换不受系数影响,可简化为:

由于船只目标的像素集中连续分布,这些像素对应的f h=1(x)较大,而海杂波像素是分散的,对应的f h=1(x)较小,因此可用于识别船只目标。
3 研究结果与分析
本文综合利用GF-3 FSI、Sentinel-1 IW、Sentinel-2 MSI等多源卫星遥感影像,结合NDWI、OTSU、CFAR等方法对舟山区域海上船只进行了识别分析。
1)对比同时期Sentinel-2 MSI、Sentinel-1 IW和GF-3 FSI数据,通过目视判读(图6)可以发现:①在SAR影像中,由于船只形成的“角散射”效应,船只相较于海面呈明显高亮显示,其特征较光学影像更明显;②得益于更高的分辨率,GF-3 FSI影像的船只轮廓比Sentinel-1 IW更清晰,尤其是较小目标的船体;③虽然SAR数据的海上船只识别能力比光学数据强,但在海陆交界处,由于海域中舰船目标无规则摇摆、目标遮挡以及不完全观测等因素,导致沿岸轮廓信息难以判读,而在光学影像中,海陆分界特征则更加明显。
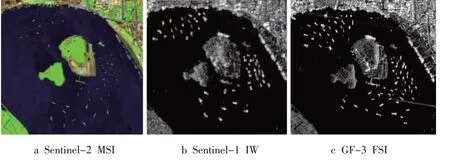
图6 同时期Sentinel-2 MSI、Sentinel-1 IW和GF-3 FSI对比图
2)对比GF-3 FSI和Sentinel-1 IW船只识别结果发现,前者对于较小目标船体具有更好的识别效果,Sentinel-1 IW则存在较多漏检,如图7所示。
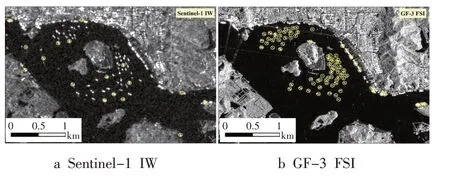
图7 CFAR船只识别结果
3)基于GF-3 FSI数据,结合CFAR算法,分别在未经过陆地剔除和经过陆地剔除的基础上进行船只识别,结果如图8所示。经统计,在未经过陆地剔除的情况下,共识别得到船只2 264艘,其中由于陆地高亮房屋建筑等误检1 377艘;在经过陆地剔除的情况下,共识别得到船只887艘,经目视判读,漏检43艘、错检65艘,识别精度较陆地剔除前大幅提升,总体精度为88.4%。
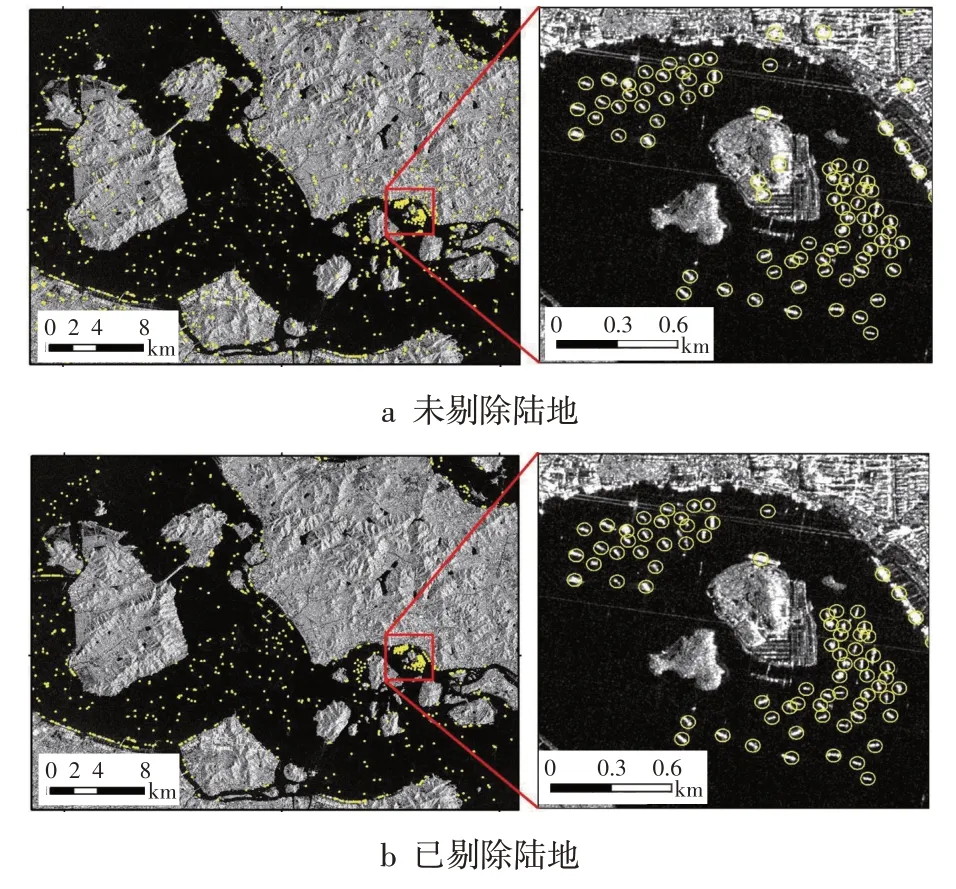
图8 CFAR船只识别结果
4)由于跨海大桥同样具有船只相似的“角反射”特性,因此造成误检数量较多,如图9所示。
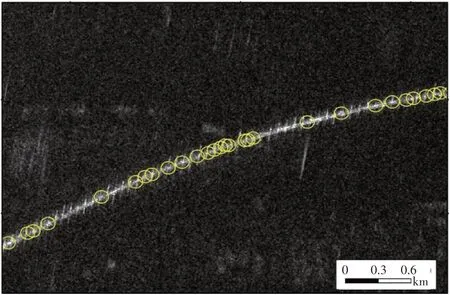
图9 跨海大桥被误检为船只
4 结语
综上所述,海上船只多源遥感监测,首先应进行精确的海陆分离,再对海上区域进行船只识别,GEE平台有助于海陆分离和船只识别技术的实现;由于雷达成像在几何、电磁散射机理中的复杂性和海域中舰船目标无规则摇摆、目标遮挡以及不完全观测等因素影响,导致雷达图像中舰船目标结构缺失以及陆地区域沿岸轮廓信息不完整,根据光学图像中海洋和陆地具有明显的轮廓特征差异化信息的特点,利用NDWI结合OTSU算法,可有效进行海陆分离,进而提升船只识别精度;SAR船只监测是雷达图像解译的重要应用之一,GF-3号作为我国自主研发并发射的相控阵体制卫星,具有多模式观测、分辨率高、成像质量好等特点,加之SAR的全天时、全天后工作能力,使得GF-3号在船只目标监测领域具有巨大的应用潜力和价值。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:07:10
大科技·百科新说(2022年4期)2022-05-30 10:48:04
牡丹(2021年11期)2021-07-20 06:02:34
舰船科学技术(2021年12期)2021-03-29 01:28:44
小哥白尼(军事科学)(2019年7期)2019-11-16 09:03:38
小哥白尼·趣味科学画报(2016年1期)2016-05-30 18:19:16
舰船科学技术(2016年1期)2016-02-27 15:39:26
舰船科学技术(2015年8期)2015-02-27 15:38:51
小星星·阅读100分(低年级)(2014年1期)2014-02-19 17:46:37
环球时报(2012-03-13)2012-03-13 13:32:26