不同能见度及信息量对驾驶人视觉特性影响
2023-02-04 03:54:34刘卓绅裴玉龙
交通科技与经济 2023年1期
刘卓绅,裴玉龙
(东北林业大学 交通学院,哈尔滨 150040)
世界工业化进程的不断发展,不仅促进经济增长,也带来严重的环境问题,雾霾、沙尘暴等极端天气频发,严重影响驾驶人的能见度,阻碍驾驶人迅速识别交通标志信息,对驾驶人的判断和驾驶行为产生干扰,使驾驶人安全驾驶到目的地难度增加。文中研究目的在于探究驾驶人在不同能见度及交通标志信息量条件下的视觉特性,提高交通安全水平与运行效率。
Fang等[1]通过城市隧道的驾驶试验,探究隧道长度与最大瞳孔直径及眼跳百分比之间的关系;Savage等[2]通过模拟驾驶试验对不同年龄驾驶人行驶到交叉口时的头部和眼部运动进行分析,结果表明高龄驾驶人的眼部扫描范围更大,但头部和眼部的扫描范围更小;Vignali等[3]通过对驾驶人在正常道路和施工道路行车过程中的视认特性分析,发现相比于综合标志驾驶人对单个标志的视认持续时间会更长;Madlenak等[4]分析驾驶人在白天和夜晚时段行车对交通信息牌的视认程度;Lyu等[5]运用仿真驾驶试验探究交通标志信息量对驾驶人驾驶行为的影响;Cheng等[6]通过实车试验对驾驶人驶入、驶出城市快速路视觉特性进行探究;Li等[7]通过在山路急转弯路段进行实车测试,分析不同速度下驾驶人对急转弯标志的视觉认知过程;Costa等[8]通过实车驾驶试验的方式,分析驾驶人注视点和记忆力,发现在忽略标志设置高度和角度的方式条件下,约有7%的交通标志会被记住;Chao等[9]研究了光照和年龄对交通标志阈值与自信识别的影响,结果表明夜晚和雨天会导致年长驾驶人视认效果降低,增大交通事故的发生机率;Charlton[10]通过驾驶试验的方式获取驾驶人对16种不同警告交通标志的注意力、视觉搜索、醒目性等数据,分析不同场景下警告标志对驾驶人视觉特性影响;冯笑凡[11]通过模拟驾驶试验,分析车路协同的雾天预警系统对驾驶人视觉特性的影响;戚春华等[12-13]通过模拟驾驶试验,分别验证驾驶人心电指标和视觉特性对草原公路上交通标志信息量的敏感性和有效性;韩磊等[14]通过建立不同层级交通工程设施信息量的虚拟试验场景,分析注视强度等视觉评价指标与信息层级的关系;柯畅等[15]通过驾驶模拟试验的方式采集驾驶人的眼动数据,分析发现不同信息量及车流量都会对驾驶员的注视次数、平均注视时间和搜索时间产生影响;杜志刚等[16]通过模拟驾驶实验,对单一标志和组合标志的视认时间和视认反应时间进行对比分析,得到不同类型的冗余信息对指路标志的影响程度也不相同;刘博华等[17]通过对不同速度下的驾驶人眼动参数分析,验证注视次数和注视时间与交通标志信息量的关系,确定适合的信息量;苏文鹏[18]基于城市交叉口告知标志现状和驾驶员视觉特性,提出一种新的平面交叉口告知标志设置方案。
综上,目前国内外学者从交通标志类型及信息量的角度,探究驾驶人视认过程、视觉特性与交通标志相关参数的内在联系。但已有研究中,关于不同能见度及信息量条件下交通标志对驾驶人视觉特性影响的研究较少,因此,文中在现有研究和规范基础上,通过模拟驾驶试验的方法,分析在不同能见度的城市主干路条件下,各种交通标志信息量对驾驶人视觉特性的影响。
1 试验设计
1.1 试验被试对象
已有研究表明,驾驶人因性格、年龄、反应力等方面的差别,导致其驾驶方式各不相同,有关交通事故责任者的相关调查统计结果表明,交通事故责任者年龄多集中在18~25岁[19-20]。因此,文中招募有驾驶经验的在校大学生作为模拟驾驶试验的驾驶人。
使用简单随机抽样的方法确定驾驶人的样本量,样本量算式为
(1)
式中:n为试验所需试样数量;Z为置信度统计量;σ为驾驶人各参数总体标准偏离;e为驾驶人各指标允许误差。
试验随机招募21位不同性别及年龄的被试人员,要求被试人员矫正视力5.0以上,身体健康,无眼部疾病,且具有不同道路环境的驾驶经验。
1.2 试验设备
模拟驾驶用到的设备是德国WIVW公司开发的驾驶模拟器,模拟器中驾驶设施与实车结构相同;采用瑞典SMART EYE公司研制的非接触式眼动追踪设备Smart eye,以60 Hz的频率对驾驶人双眼进行追踪和数据采集;试验使用SILAB软件对道路、车辆和交通标志等要素进行组合,完成驾驶场景的搭建。仿真模拟驾驶平台及眼动仪如图1所示,试验设备及软件如表1所示。

图1 仿真模拟驾驶平台

表1 试验设备及软件
1.3 试验场景搭建
以实际的城市主干路为依据,参考2016年版的《城市道路工程设计规范》(CJJ37-2012),通过SILABA Edit软件搭建车道宽度为3.75 m、设计速度为60 km·h-1的试验场景。为研究不同能见度条件下的驾驶人视觉特性,参考《雾的预报等级》(GB/T 27964-2011)对试验场景的能见度等级进行分类,能见度等级如表2所示。

表2 道路能见度等级
文中以信息论为依据进行交通标志信息量计算。信息论提出了携带的信息量与该物所携带内容元素出现的概率有关[21],假设城市干路交通标志的概率空间为(X,Q,P)和Q=(x1,x2,…,xn),P={p(x1),p(x2),…,p(xn)},信息熵可表示为
(2)
式中:xi为第i个事件,i=1,2,…N;p(xi)为第i种状态的概率,0≤p(xi)≤1;a为底数(一般取2)。
由于交通标志中的图像、符号、文本都只是构成交通标志的一个信息量,因此这些标识内的信息都具有独立性,按一般信息量统计[22]。可将式(2)简化为
H(X)=log2Q
(3)
根据式(2)~(3)对交通标志要素信息量进行计算,得到各交通标志信息元素的信息量,如表3所示。
根据各交通标志信息元素的信息量将城市主干路交通标志信息量设置为4个等级,如表4所示。

表3 各交通标志信息元素信息量

表4 交通标志信息量等级
1.4 试验流程
1)以实际道路情况为参照,构建不同能见度条件下的驾驶场景,结合试驾人建议调整场景,确保试验结果真实合理;
2)选定符合标准的驾驶人参与试验,对驾驶人基本情况进行记录,签署驾驶试验知情同意书;
3)安装并开启试验设备,调试设备确保其在试验过程中正常运行;
4)驾驶人进入驾驶舱,适应模拟驾驶器的驾驶环境;
5)对驾驶人进行安全培训,提前告知试验过程中可能发生的情况;
6)在受试者进入驾驶舱调整合适姿势后,调试眼动仪,进行捕捉、校准和对焦;
7)开始试验,驾驶人按要求在模拟场景下进行驾驶,对驾驶人的眼动数据进行记录;
8)试验期间给予驾驶人充足的休息时间,使其在良好状态下进行试验,并依次完成全部场景驾驶;
9)更换新的驾驶人,重复上述步骤;
10)试验结束。
1.5 数据预处理
根据已有研究,驾驶人在对交通标志的视觉识别过程中存在“人工反应时间”间隔,结合相关心理学理论,值应为211 ms。一般认为驾驶人识别和阅读交通标志的时间在0.5~2.0 s之间,鉴于试验涉及到标志组合,需要适当增加识别时间,因此文中将时间限定为0.2~3.0 s。但对受试者在试验过程中由于注意力分散、紧张等原因出现的操作错误,使容量超出限制的数据不予采用。
2 视觉特性指标分析
2.1 注视行为
注视时间表征了驾驶人处理信息所需要的时间,表示驾驶人获得信息的困难程度。注视时间与注视过程中处理信息的复杂程度呈正相关:信息复杂程度越高,相应的注视时间越长;出现在驾驶人视线区域内的信息密度越大,注视时间就越长。对不同能见度条件下驾驶人的平均注视时间进行分析,结果如图2所示。
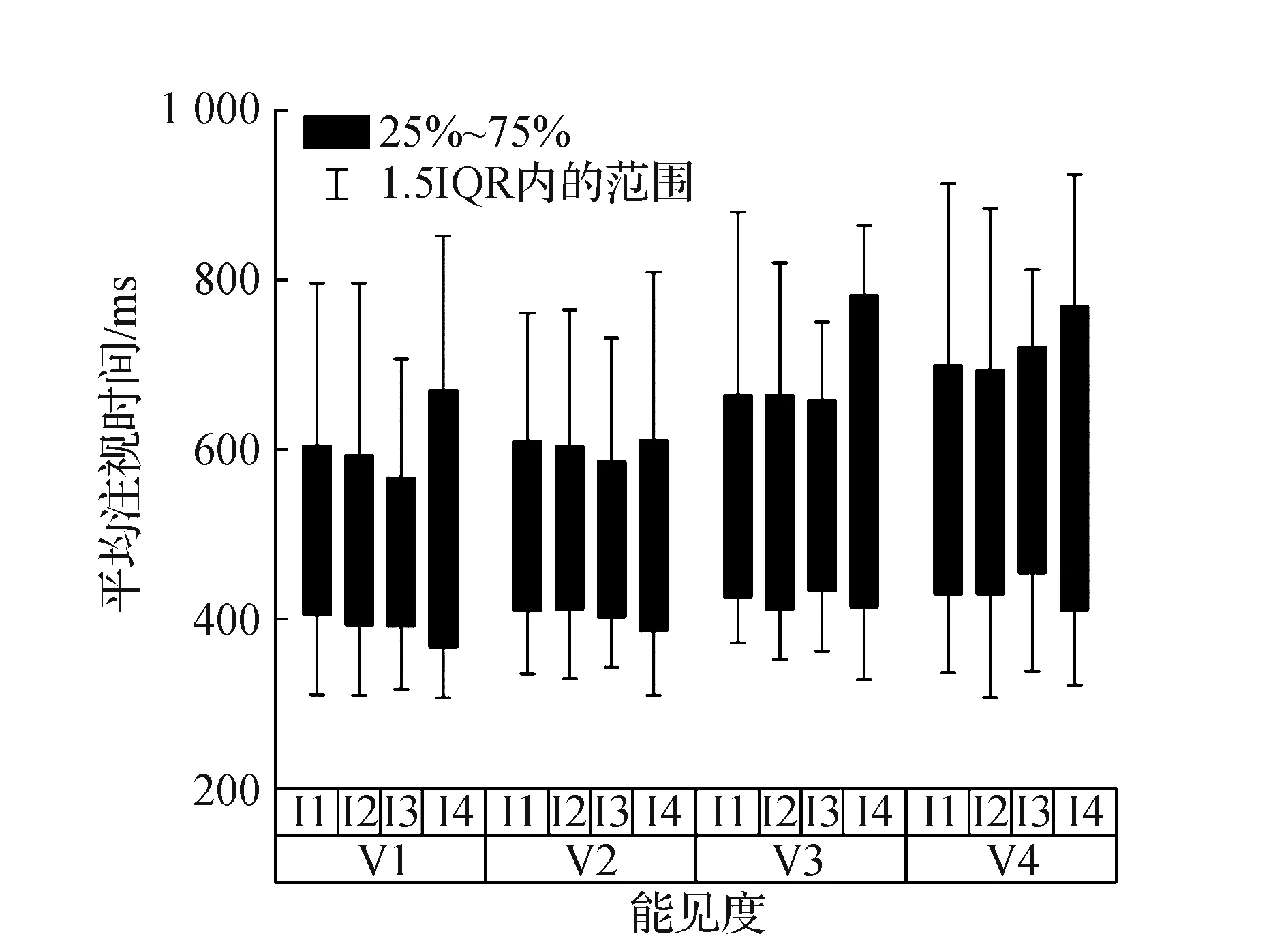
图2 不同能见度条件下驾驶人平均注视时间
由图2可知,在4种不同能见度条件下,当驾驶人在不同交通标志信息量等级条件下的城市主干路场景行驶时:平均注视时间整体呈上升趋势,并且上下四分位数也逐渐分散,说明能见度对驾驶人的平均注视时间产生较大影响;平均注视时间稳定性降低,出现大幅度变化和波动,说明驾驶人的视觉注意力稳定性较差。当能见度条件相同时,根据箱线图中表征样本的上、下四分位数及整体数据分布情况可得,随着交通标志信息量的增大,平均注视时间呈现出由分散逐渐集中、再逐渐分散的变化趋势,说明在信息量I3条件下驾驶人对行车时道路交通环境的信息获取和认知能力较为稳定。当能见度为V1、V2条件时,各个信息量条件下注视时间的上、下四分位数及整体数据在较低水平;当能见度到达V3条件时迅速增长,说明当能见度低至V3、V4条件时,能见度成为影响驾驶人注视时间的主要因素。能见度过低使得驾驶过程中道路上的车辆、标志及景观等突然出现在驾驶人视野内,严重影响行车安全。
2.2 扫视行为
扫视时间是指驾驶人在驾驶过程用于视觉搜索的时间。扫视时间和所处理信息量的复杂程度密切相关,扫视时间反映了驾驶人获取信息量的能力。扫视时间越短,表明驾驶人越容易发现并看清交通标志;反之,则越困难。对不同能见度条件下驾驶人的扫视时间占比进行分析,得到结果如图3所示。
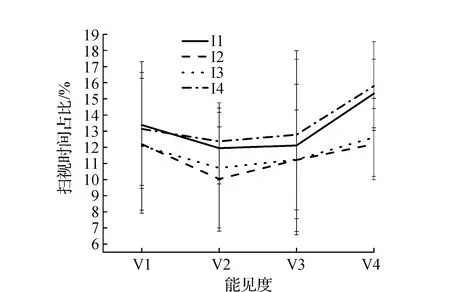
图3 不同能见度条件下驾驶人扫视时间占比
由图3可知,随着城市主干路能见度的变化,不同信息量条件下的扫视时间百分比表现出先下降后上升趋势,说明能见度显著影响了驾驶人对扫视行为的时间分配。能见度为V1、V2条件时各个信息量条件下的扫视时间百分比主要集中在10.3%~13.4%之间;而能见度为V3、V4条件时,各信息量条件下的该项指标值在11.2%~15.8%之间。从整体趋势看,各个信息量条件下的扫视时间百分比随着能见度下降而增加,这是因为:能见度在V1~V3的条件下,驾驶人在行车过程中可快速判定出各类交通信息中的重要信息,保证驾驶员的正常行驶,因此驾驶员的视线转移较快且所用的注视时间也较短;而能见度降低至V4条件时,驾驶人视线受阻,不能迅速判别出有用的交通信息,视线转移速度较慢。
2.3 瞳孔直径
瞳孔大小可由瞳孔直径进行表征。获取繁多的信息、进行复杂的思考都会对驾驶人的心理产生一定负担,从而对瞳孔大小产生影响,所以瞳孔直径的变化能直接反应驾驶人的心理负荷。当驾驶人的状态良好时,心理负荷度对瞳孔面积的影响最为显著。心理负荷度越小,说明交通标志的设置越符合人机工程学,驾驶员能较快地接收各类交通信息。为控制光照对驾驶员瞳孔大小的影响,本试验在光照强度不变的室内进行,得到不同能见度条件下驾驶人的瞳孔直径,分析结果如图4所示。
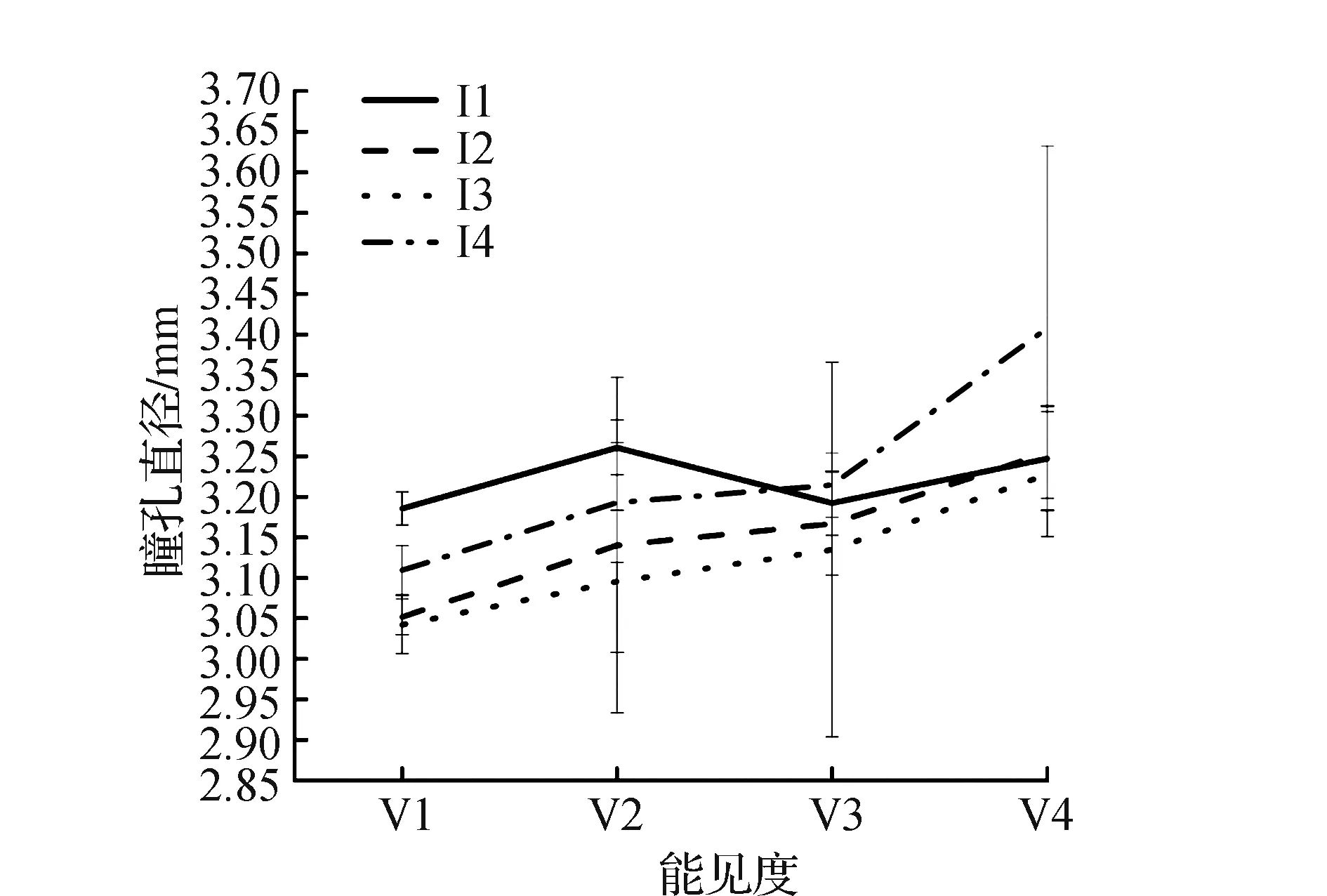
图4 不同能见度条件下驾驶人瞳孔直径
由图4可知,随着城市主干路能见度的变化,不同信息量条件下的驾驶人瞳孔直径有明显波动,随着能见度的下降,瞳孔直径整体呈上升趋势。当能见度相同时,信息量在I2、I3条件时瞳孔直径较小,说明此时心理负荷度小,驾驶人更容易接收与理解道路交通信息;当能见度在V2、V3条件时驾驶人瞳孔直径较为接近,平均值在3.09~3.26 mm;当能见度在V4条件时,平均值上升到3.22~3.40 mm,说明能见度对驾驶人瞳孔直径影响较大。在能见度较低条件下,驾驶人将注意力用在注视或看清道路上的各种交通标志及各方向来车,导致驾驶人精神紧张,心理负荷度较大。
2.4 注视转移特性
2.4.1 AOI划分
为准确区分驾驶人的注视兴趣区域(AOI),文中使用K-means算法加以区分。将驾驶人注视点在视野平面上的几何位置作为聚类变量,即对凝视点的位置进行聚类,选取每位驾驶人2 000~3 000个连续注视点作为聚类对象,将驾车人视线平面分割为车辆近左侧区域(L)、车辆远部区域(U)、车辆近部区域(D)和车辆近右侧区域(R),划分结果如图5所示。
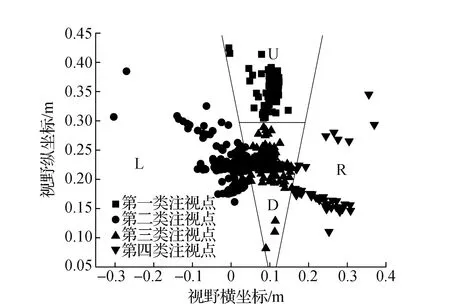
图5 注视点聚类结果及AOI划分
2.4.2 注视点转移概率及特征
马尔可夫链是一个典型的无后效随机过程,表示未来状态的时间安排完全有别于过去状态,主要取决于当前状态F(n)。将驾驶人的注意力在不同位置上定义成不同的状态事件,驾驶人的下一次注意行为变化只与现在的位置有关,那么每个注意行为在时间和状态事件中都被视为离散状态,因此可以用马尔科夫链模型对驾驶人注意行为过程的变化状态进行解释[23]。而马尔科夫链的概率表达式为
P{F(n+m)=j|F(n)=i}k≥1
(4)
把转移机率pij(n,n+m)记为pij(m),当m=1时,pij(1)就称为下一步的转移概率,记为pij(1)。设P为由转移概率pij而形成的矩阵,则有
(5)
设aij为将状态从i区域变为j区域的频数,由于样本容量够大,所以可用样本分布近似来说明状态的基本情况。则从状态i传递到状态j的传递概率为
(6)
Rstudio是基于R语言的免费且开源项目,可在Windows、Linux等多种系统平台顺利运行,具有各种各样的数据分析包,可对任何数据进行分析计算。因此,文中使用Rstudio求解在4种能见度条件下驾驶人注视点在L、U、D、R区域间的一步转移概率,如表5所示。
由表5可知:驾驶人的注视点在各个兴趣区域之间的转移特性随能见度条件的降低而改变,表明能见度的改变对驾驶人的注意力分配影响较大;在相同能见度条件下,不同信息量的一步转移概率值有所不同,在I3条件下相对平均,说明该信息量条件下驾驶人的视觉搜索策略更为灵活;在各个能见度条件下的注视一步转移概率均集中在R、U、D区域,说明驾驶过程中驾驶人注意力向着道路右侧、远处和近处转移更加频繁。
随着城市主干路的能见度降低,U区域的一步转移概率值逐渐降低,在能见度V3、V4条件下D区域的一步转移概率值呈递增趋势,说明能见度的降低对驾驶人的注视转移产生影响。为及时有效捕捉道路交通信息,驾驶人的注意力会更倾向于转移至道路近处区域,甚至对该区域反复注视,增加驾驶人的心理负荷。
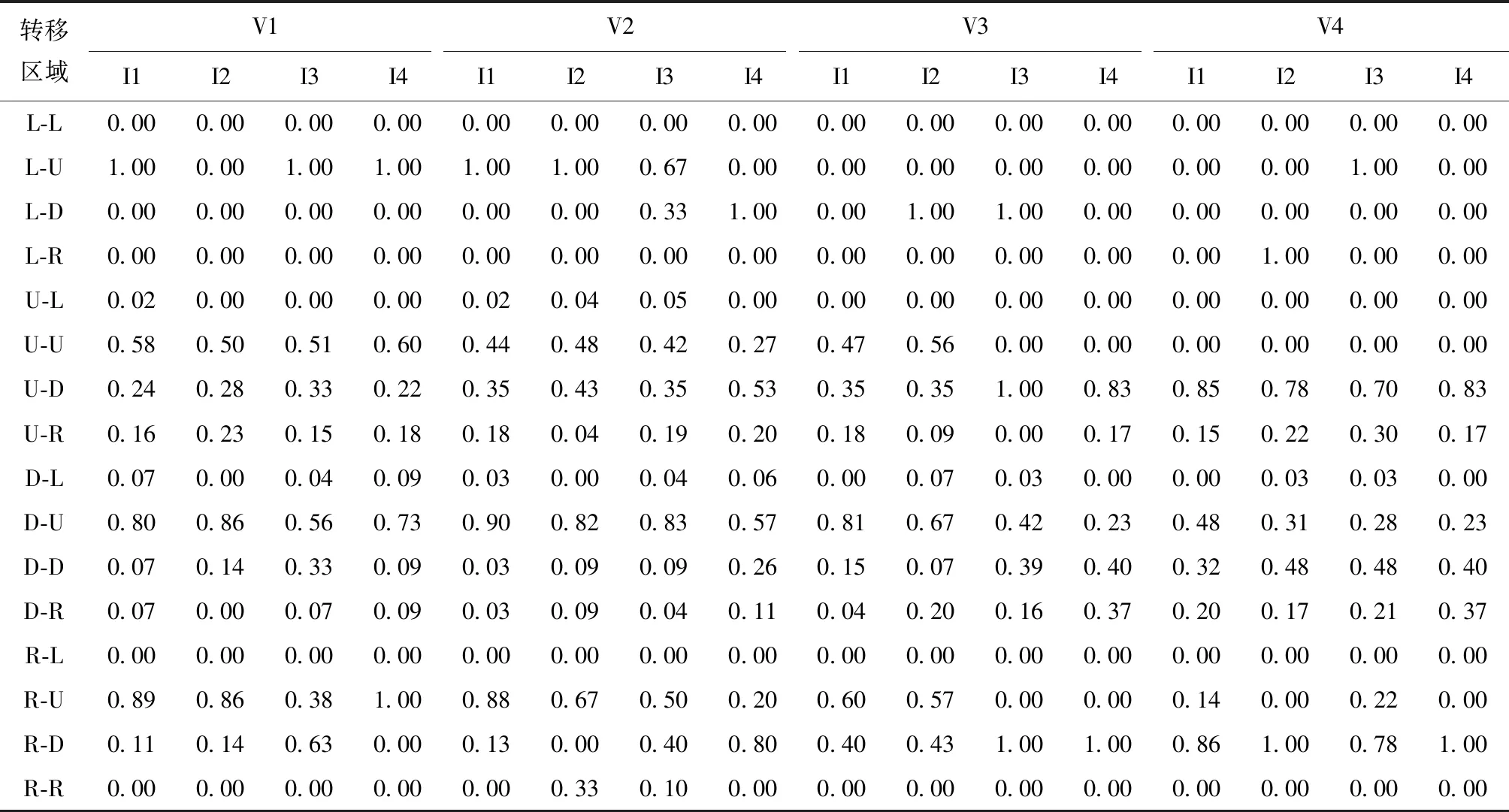
表5 不同能见度条件下驾驶人注视状态转移概率
2.4.3 注视行为平稳概率分布
设{Fn,n≥0}为齐次马尔可夫链,状态空间为M,转移概率为pij,存在概率分布{πi,j∈M},若满足
(7)
则称{πi,j∈M}为马尔科夫链的平稳分布。
马尔可夫链的遍历性说明:在一段时间内,系统可以到达了一个稳定阶段,即
(8)
根据驾驶人的注视转移矩阵建立方程组
(9)
4种能见度条件下驾驶人注视点在L、U、D、R区域的注视平稳分布计算结果为
1)能见度V1条件下驾驶人注视行为平稳分布
2)能见度V2条件下驾驶人注视行为平稳分布
3)能见度V3条件下驾驶人注视行为平稳分布
4)能见度V4条件下驾驶人注视行为平稳分布
不同能见度条件下驾驶人的注视平稳分布概率如图6所示。当能见度相同时,信息量I3条件下驾驶人对各个区域的注视概率分布相对平均,表明此条件下驾驶人对道路信息的搜寻效果较好;当信息量相同时,随着能见度的降低,驾驶人对U区域的注视概率逐渐降低、对D和R区域的注视概率逐渐上升,即随着能见度的降低,注视点逐渐向道路近处和右侧转移,说明驾驶人的注意力被近处道路环境和交通标志所吸引,无法及时获取远处的潜在威胁。
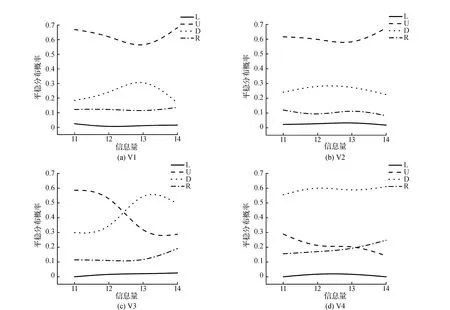
图6 不同能见度条件下驾驶人注视行为平稳分布
驾驶人在能见度V1、V2条件下注视点落在U区域的概率较大,均在0.5以上,其次是D区域,注视概率介于0.2~0.3,R和L区域的注视概率没有明显变化,即当驾驶人对各区域注视稳定后,注视区域中道路远处的注视概率更大。随着能见度降低,U区域的注视概率呈下降趋势,D和R区域的注视概率呈上升趋势,L区域的注视概率保持相对稳定,即当驾驶人对各区域注视稳定后,注视区域落在道路近处和右侧的概率将更大。
3 结 论
通过对比分析不同能见度及信息量条件下驾驶人视觉指标的变化规律及动态视觉转移规律,得出以下结论。
1)根据注视时长、扫视百分比和瞳孔直径的变化规律可知:当能见度在V1、V2条件时交通标志信息量在I3条件下驾驶人能够迅速判别道路交通环境信息中的重点信息,视线转移灵活;当能见度低至V3水平以下时,能见度成为影响驾驶人注视时间的主要因素,能见度过低使得驾驶过程中车辆、标志及景观会突然出现在驾驶人视野内,严重影响行车安全。
2)通过对注视转移概率的计算和分析可知:当能见度相同时,信息量在I3条件时驾驶人的概率相对平均,视觉搜索策略灵活;当城市主干路的能见度降低到V3条件以下时,道路近处区域的一步转移概率上升至最大,驾驶人的注意力会更倾向于转移至道路近处区域,甚至对该区域反复注视,增强驾驶人的心理负荷。
3)对不同条件下的注视平稳分布概率分析表明:当能见度相同时,信息量在I3条件下驾驶人对道路各个区域的注视分配更有效,注视特性表现最好;随着能见度降低,能见度对注视平稳性产生较大影响,驾驶人的注视区域由道路远处移动至道路近处、右侧,无法及时搜索远处的潜在威胁,不利于行车安全。
猜你喜欢
东方少年·布老虎画刊(2023年12期)2024-01-01 08:51:05
汽车实用技术(2022年9期)2022-05-20 06:04:02
Advances in Meteorological Science and Technology(2019年6期)2019-12-30 11:45:42
西南交通大学学报(2018年5期)2018-11-08 10:59:16
新闻传播(2016年11期)2016-07-10 12:04:01
中国交通信息化(2016年6期)2016-06-06 07:11:30
小天使·一年级语数英综合(2016年8期)2016-05-14 19:43:16
海洋气象学报(2016年3期)2016-02-28 14:27:42
气象研究与应用(2016年4期)2016-02-27 12:23:16
计算机工程(2015年4期)2015-07-05 08:29:20